Versuchsanleitung - EAL Lehrstuhl für Elektrische Antriebssysteme ...
Versuchsanleitung - EAL Lehrstuhl für Elektrische Antriebssysteme ...
Versuchsanleitung - EAL Lehrstuhl für Elektrische Antriebssysteme ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
1.3. Fremderregte Gleichstrommaschine<br />
Symbole Physikalische Größen Symbole Physikalische Größen<br />
U A Ankerspannung I E Erregerstrom<br />
I A Ankerstrom R E Erregerwiderstand<br />
R A Ankerwiderstand C M Maschinenkonstante<br />
L A Ankerinduktivität M Mi Luftspaltmoment<br />
E A Elektromotorische Kraft (EMK) M L Lastmoment<br />
Ψ E Erreger-Flussverkettung Θ M Rotorträgheitsmoment<br />
U E Erregerspannung Ω M Rotorwinkelgeschwindigkeit<br />
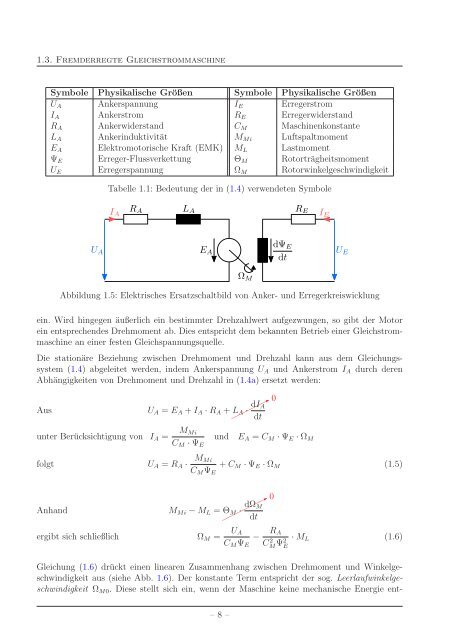
Tabelle 1.1: Bedeutung der in (1.4) verwendeten Symbole<br />
Abbildung 1.5: <strong>Elektrische</strong>s Ersatzschaltbild von Anker- und Erregerkreiswicklung<br />
ein. Wird hingegen äußerlich ein bestimmter Drehzahlwert aufgezwungen, so gibt der Motor<br />
ein entsprechendes Drehmoment ab. Dies entspricht dem bekannten Betrieb einer Gleichstrommaschine<br />
an einer festen Gleichspannungsquelle.<br />
Die stationäre Beziehung zwischen Drehmoment und Drehzahl kann aus dem Gleichungssystem<br />
(1.4) abgeleitet werden, indem Ankerspannung U A und Ankerstrom I A durch deren<br />
Abhängigkeiten von Drehmoment und Drehzahl in (1.4a) ersetzt werden:<br />
0<br />
Aus U A = E A +I A ·R A + L ✟<br />
✟ ✟✟✟✯ A · dI A<br />
dt<br />
unter Berücksichtigung von I A = M Mi<br />
C M ·Ψ E<br />
und E A = C M ·Ψ E ·Ω M<br />
folgt U A = R A ·<br />
M Mi<br />
C M Ψ E<br />
+C M ·Ψ E ·Ω M (1.5)<br />
0<br />
Anhand M Mi −M L = Θ<br />
✟<br />
✟ M ✟✟✟✟✯ · dΩ M<br />
dt<br />
ergibt sich schließlich<br />
Ω M = U A<br />
C M Ψ E<br />
− R A<br />
C 2 M Ψ2 E<br />
·M L (1.6)<br />
Gleichung (1.6) drückt einen linearen Zusammenhang zwischen Drehmoment und Winkelgeschwindigkeit<br />
aus (siehe Abb. 1.6). Der konstante Term entspricht der sog. Leerlaufwinkelgeschwindigkeit<br />
Ω M0 . Diese stellt sich ein, wenn der Maschine keine mechanische Energie ent-<br />
– 8 –