Versuchsanleitung - EAL Lehrstuhl für Elektrische Antriebssysteme ...
Versuchsanleitung - EAL Lehrstuhl für Elektrische Antriebssysteme ...
Versuchsanleitung - EAL Lehrstuhl für Elektrische Antriebssysteme ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
1.4. Sensorik<br />
ZusammenfassendsindMessrauschenundOffsetdiebedeutendstenFehlerquellenbeiderStrommessung.<br />
Im Rahmen des Praktikums wird der Offset vernachlässigt und die Strommessung als<br />
Überlagerung des tatsächlichen Stromes mit einem Rauschsignal modelliert, wie in Abb. 1.10<br />
dargestellt.<br />
Abbildung 1.10: Verwendetes Modell der Strommessung<br />
1.4.2 Drehzahlmessung<br />
In der Praxis wird zur Drehzahlmessung meist die Ableitung des Rotorwinkelsignals verwendet,<br />
welches über einen am Rotor befestigten Drehgeber erfasst wird.<br />
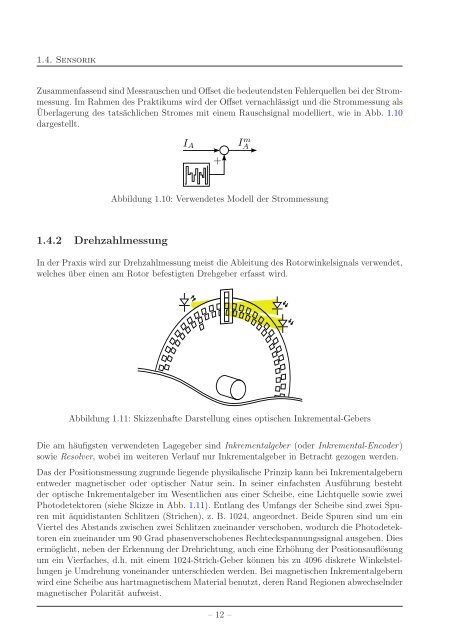
Abbildung 1.11: Skizzenhafte Darstellung eines optischen Inkremental-Gebers<br />
Die am häufigsten verwendeten Lagegeber sind Inkrementalgeber (oder Inkremental-Encoder)<br />
sowie Resolver, wobei im weiteren Verlauf nur Inkrementalgeber in Betracht gezogen werden.<br />
Das der Positionsmessung zugrunde liegende physikalische Prinzip kann bei Inkrementalgebern<br />
entweder magnetischer oder optischer Natur sein. In seiner einfachsten Ausführung besteht<br />
der optische Inkrementalgeber im Wesentlichen aus einer Scheibe, eine Lichtquelle sowie zwei<br />
Photodetektoren (siehe Skizze in Abb. 1.11). Entlang des Umfangs der Scheibe sind zwei Spuren<br />
mit äquidistanten Schlitzen (Strichen), z. B. 1024, angeordnet. Beide Spuren sind um ein<br />
Viertel des Abstands zwischen zwei Schlitzen zueinander verschoben, wodurch die Photodetektoren<br />
ein zueinander um 90 Grad phasenverschobenes Rechteckspannungssignal ausgeben. Dies<br />
ermöglicht, neben der Erkennung der Drehrichtung, auch eine Erhöhung der Positionsauflösung<br />
um ein Vierfaches, d.h. mit einem 1024-Strich-Geber können bis zu 4096 diskrete Winkelstellungen<br />
je Umdrehung voneinander unterschieden werden. Bei magnetischen Inkrementalgebern<br />
wird eineScheibeaushartmagnetischemMaterialbenutzt,derenRandRegionen abwechselnder<br />
magnetischer Polarität aufweist.<br />
– 12 –