Versuchsanleitung - EAL Lehrstuhl für Elektrische Antriebssysteme ...
Versuchsanleitung - EAL Lehrstuhl für Elektrische Antriebssysteme ...
Versuchsanleitung - EAL Lehrstuhl für Elektrische Antriebssysteme ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
2.2. Modell des Gleichstromantriebs<br />
M L<br />
U ∗ A U A I A<br />
1<br />
1<br />
R A<br />
T A C M<br />
Θ M<br />
M M<br />
−<br />
Ω M<br />
... <strong>für</strong> Anker<br />
−<br />
E A<br />
C M<br />
1<br />
R E<br />
U ∗ E U E I E Ψ E<br />
... <strong>für</strong> Erreger<br />
−<br />
dΨ E /dt<br />
Pulssteller<br />
Gleichstrommotor<br />
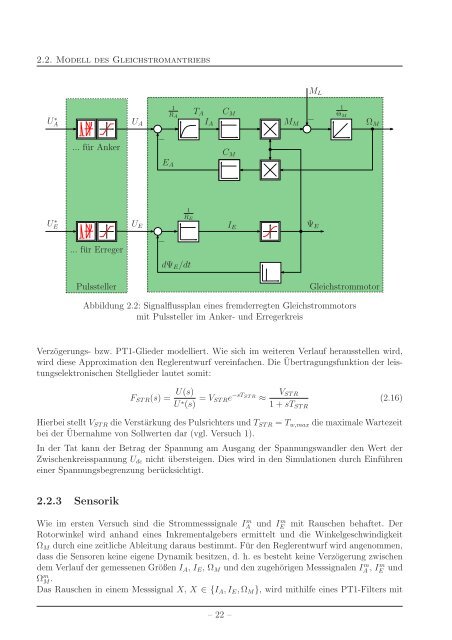
Abbildung 2.2: Signalflussplan eines fremderregten Gleichstrommotors<br />
mit Pulssteller im Anker- und Erregerkreis<br />
Verzögerungs- bzw. PT1-Glieder modelliert. Wie sich im weiteren Verlauf herausstellen wird,<br />
wird diese Approximation den Reglerentwurf vereinfachen. Die Übertragungsfunktion der leistungselektronischen<br />
Stellglieder lautet somit:<br />
F STR (s) = U(s)<br />
U ∗ (s) = V STRe −sT STR<br />
≈ V STR<br />
1+sT STR<br />
(2.16)<br />
Hierbei stellt V STR die Verstärkung des Pulsrichters und T STR = T w,max die maximale Wartezeit<br />
bei der Übernahme von Sollwerten dar (vgl. Versuch 1).<br />
In der Tat kann der Betrag der Spannung am Ausgang der Spannungswandler den Wert der<br />
Zwischenkreisspannung U dc nicht übersteigen. Dies wird in den Simulationen durch Einführen<br />
einer Spannungsbegrenzung berücksichtigt.<br />
2.2.3 Sensorik<br />
Wie im ersten Versuch sind die Strommesssignale IA m und Im E mit Rauschen behaftet. Der<br />
Rotorwinkel wird anhand eines Inkrementalgebers ermittelt und die Winkelgeschwindigkeit<br />
Ω M durch eine zeitliche Ableitung daraus bestimmt. Für den Reglerentwurf wird angenommen,<br />
dass die Sensoren keine eigene Dynamik besitzen, d. h. es besteht keine Verzögerung zwischen<br />
dem Verlauf der gemessenen Größen I A , I E , Ω M und den zugehörigen Messsignalen IA m, Im E und<br />
Ω m M .<br />
Das Rauschen in einem Messsignal X, X ∈ {I A ,I E ,Ω M }, wird mithilfe eines PT1-Filters mit<br />
– 22 –