Versuchsanleitung - EAL Lehrstuhl für Elektrische Antriebssysteme ...
Versuchsanleitung - EAL Lehrstuhl für Elektrische Antriebssysteme ...
Versuchsanleitung - EAL Lehrstuhl für Elektrische Antriebssysteme ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
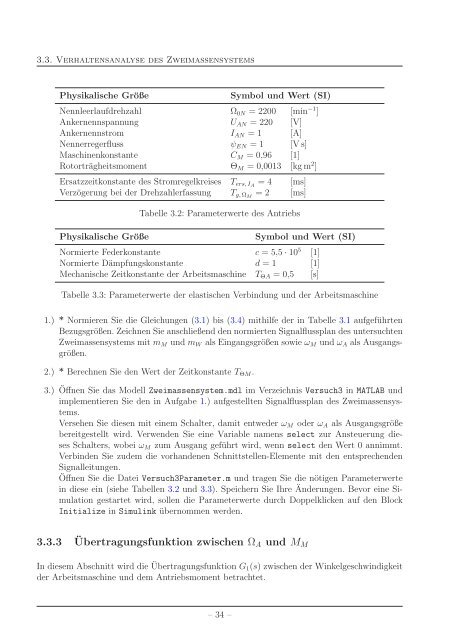
3.3. Verhaltensanalyse des Zweimassensystems<br />
Physikalische Größe<br />
Symbol und Wert (SI)<br />
Nennleerlaufdrehzahl Ω 0N = 2200 [min −1 ]<br />
Ankernennspannung U AN = 220 [V]<br />
Ankernennstrom I AN = 1 [A]<br />
Nennerregerfluss ψ EN = 1 [Vs]<br />
Maschinenkonstante C M = 0,96 [1]<br />
Rotorträgheitsmoment Θ M = 0,0013 [kgm 2 ]<br />
Ersatzzeitkonstante des Stromregelkreises T ers,IA = 4 [ms]<br />
Verzögerung bei der Drehzahlerfassung T g,ΩM = 2 [ms]<br />
Physikalische Größe<br />
Tabelle 3.2: Parameterwerte des Antriebs<br />
Symbol und Wert (SI)<br />
Normierte Federkonstante c = 5,5·10 5 [1]<br />
Normierte Dämpfungskonstante d = 1 [1]<br />
Mechanische Zeitkonstante der Arbeitsmaschine T ΘA = 0,5 [s]<br />
Tabelle 3.3: Parameterwerte der elastischen Verbindung und der Arbeitsmaschine<br />
1.) * Normieren Sie die Gleichungen (3.1) bis (3.4) mithilfe der in Tabelle 3.1 aufgeführten<br />
Bezugsgrößen. Zeichnen Sie anschließend den normierten Signalflussplan des untersuchten<br />
Zweimassensystems mit m M und m W als Eingangsgrößen sowie ω M und ω A als Ausgangsgrößen.<br />
2.) * Berechnen Sie den Wert der Zeitkonstante T ΘM .<br />
3.) Öffnen Sie das Modell Zweimassensystem.mdl im Verzeichnis Versuch3 in MATLAB und<br />
implementieren Sie den in Aufgabe 1.) aufgestellten Signalflussplan des Zweimassensystems.<br />
Versehen Sie diesen mit einem Schalter, damit entweder ω M oder ω A als Ausgangsgröße<br />
bereitgestellt wird. Verwenden Sie eine Variable namens select zur Ansteuerung dieses<br />
Schalters, wobei ω M zum Ausgang geführt wird, wenn select den Wert 0 annimmt.<br />
Verbinden Sie zudem die vorhandenen Schnittstellen-Elemente mit den entsprechenden<br />
Signalleitungen.<br />
Öffnen Sie die Datei Versuch3Parameter.m und tragen Sie die nötigen Parameterwerte<br />
in diese ein (siehe Tabellen 3.2 und 3.3). Speichern Sie Ihre Änderungen. Bevor eine Simulation<br />
gestartet wird, sollen die Parameterwerte durch Doppelklicken auf den Block<br />
Initialize in Simulink übernommen werden.<br />
3.3.3 Übertragungsfunktion zwischen Ω A und M M<br />
In diesem Abschnitt wird die Übertragungsfunktion G 1 (s) zwischen der Winkelgeschwindigkeit<br />
der Arbeitsmaschine und dem Antriebsmoment betrachtet.<br />
– 34 –