Versuchsanleitung - EAL Lehrstuhl für Elektrische Antriebssysteme ...
Versuchsanleitung - EAL Lehrstuhl für Elektrische Antriebssysteme ...
Versuchsanleitung - EAL Lehrstuhl für Elektrische Antriebssysteme ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
2.3. Ankerstromregelung<br />
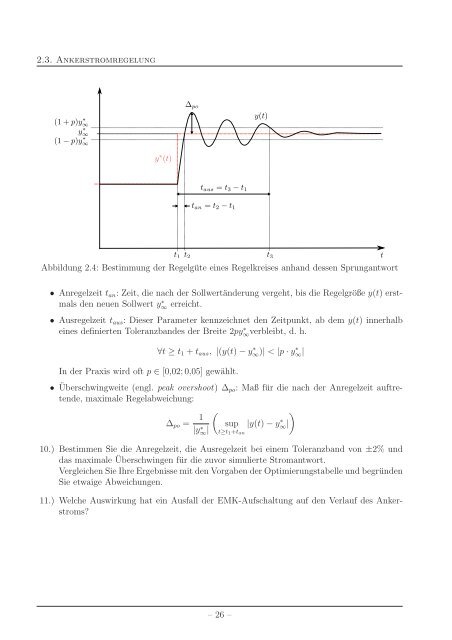
Abbildung 2.4: Bestimmung der Regelgüte eines Regelkreises anhand dessen Sprungantwort<br />
• Anregelzeit t an : Zeit, die nach der Sollwertänderung vergeht, bis die Regelgröße y(t) erstmals<br />
den neuen Sollwert y ∗ ∞ erreicht.<br />
• Ausregelzeit t aus : Dieser Parameter kennzeichnet den Zeitpunkt, ab dem y(t) innerhalb<br />
eines definierten Toleranzbandes der Breite 2py ∗ ∞verbleibt, d. h.<br />
∀t ≥ t 1 +t aus , |(y(t)−y ∗ ∞)| < |p·y ∗ ∞|<br />
In der Praxis wird oft p ∈ [0,02;0,05] gewählt.<br />
• Überschwingweite (engl. peak overshoot) ∆ po : Maß <strong>für</strong> die nach der Anregelzeit auftretende,<br />
maximale Regelabweichung:<br />
∆ po = 1 ( )<br />
sup |y(t)−y<br />
|y<br />
∞|<br />
∗<br />
∞|<br />
∗ t≥t 1 +t an<br />
10.) Bestimmen Sie die Anregelzeit, die Ausregelzeit bei einem Toleranzband von ±2% und<br />
das maximale Überschwingen <strong>für</strong> die zuvor simulierte Stromantwort.<br />
VergleichenSieIhreErgebnissemitdenVorgabenderOptimierungstabelleundbegründen<br />
Sie etwaige Abweichungen.<br />
11.) Welche Auswirkung hat ein Ausfall der EMK-Aufschaltung auf den Verlauf des Ankerstroms?<br />
– 26 –