Versuchsanleitung - EAL Lehrstuhl für Elektrische Antriebssysteme ...
Versuchsanleitung - EAL Lehrstuhl für Elektrische Antriebssysteme ...
Versuchsanleitung - EAL Lehrstuhl für Elektrische Antriebssysteme ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
3.2. Modellierung der elastischen Kopplung<br />
Gleichstromantrieb<br />
Getriebe<br />
ü<br />
Elastische Kopplung<br />
Arbeitsmaschine<br />
M M<br />
Θ M<br />
❈✄<br />
lose<br />
❅ ❅<br />
✄❈✄❈✄❈✄❈✄❈✄❈✄❈✄❈✄❈✄❈✄❈✄❈✄❈✄❈<br />
C<br />
Θ A<br />
M W<br />
reibung<br />
✲<br />
D<br />
✲<br />
ϕ M<br />
˙ϕ M = Ω M<br />
¨ϕ M<br />
ϕ A<br />
˙ϕ A = Ω A<br />
¨ϕ A<br />
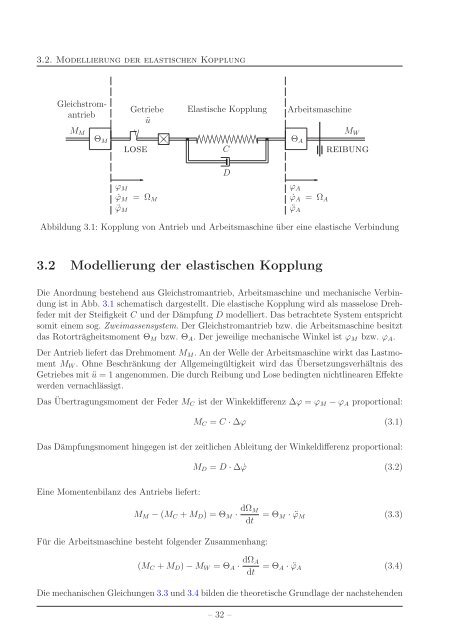
Abbildung 3.1: Kopplung von Antrieb und Arbeitsmaschine über eine elastische Verbindung<br />
3.2 Modellierung der elastischen Kopplung<br />
Die Anordnung bestehend aus Gleichstromantrieb, Arbeitsmaschine und mechanische Verbindung<br />
ist in Abb. 3.1 schematisch dargestellt. Die elastische Kopplung wird als masselose Drehfeder<br />
mit der Steifigkeit C und der Dämpfung D modelliert. Das betrachtete System entspricht<br />
somit einem sog. Zweimassensystem. Der Gleichstromantrieb bzw. die Arbeitsmaschine besitzt<br />
das Rotorträgheitsmoment Θ M bzw. Θ A . Der jeweilige mechanische Winkel ist ϕ M bzw. ϕ A .<br />
Der Antrieb liefert das Drehmoment M M . An der Welle der Arbeitsmaschine wirkt das Lastmoment<br />
M W . Ohne Beschränkung der Allgemeingültigkeit wird das Übersetzungsverhältnis des<br />
Getriebes mit ü = 1 angenommen. Die durch Reibung und Lose bedingten nichtlinearen Effekte<br />
werden vernachlässigt.<br />
Das Übertragungsmoment der Feder M C ist der Winkeldifferenz ∆ϕ = ϕ M −ϕ A proportional:<br />
M C = C ·∆ϕ (3.1)<br />
Das Dämpfungsmoment hingegen ist der zeitlichen Ableitung der Winkeldifferenz proportional:<br />
M D = D·∆ ˙ϕ (3.2)<br />
Eine Momentenbilanz des Antriebs liefert:<br />
M M −(M C +M D ) = Θ M · dΩ M<br />
dt<br />
= Θ M · ¨ϕ M (3.3)<br />
Für die Arbeitsmaschine besteht folgender Zusammenhang:<br />
(M C +M D )−M W = Θ A · dΩ A<br />
dt<br />
= Θ A · ¨ϕ A (3.4)<br />
DiemechanischenGleichungen3.3und3.4bildendietheoretischeGrundlagedernachstehenden<br />
– 32 –