Versuchsanleitung - EAL Lehrstuhl für Elektrische Antriebssysteme ...
Versuchsanleitung - EAL Lehrstuhl für Elektrische Antriebssysteme ...
Versuchsanleitung - EAL Lehrstuhl für Elektrische Antriebssysteme ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Versuch 2<br />
Regelung des Gleichstromantriebs<br />
Hinweis: Die mit * gekennzeichneten Teilaufgaben sind in der schriftlichen<br />
Versuchsvorbereitung zu lösen!<br />
2.1 Übersicht<br />
Im vorangegangenen Versuch wurden vereinfachte Modelle der Komponenten eines Gleichstromantriebs<br />
(Gleichstrommotor, Vierquadranten-Pulssteller, Sensorik) erarbeitet und mithilfe<br />
von Simulationen im gesteuerten Betrieb validiert. Sie sollen nun zur Untersuchung des Gleichstromantriebs<br />
im geschlossenen Regelkreis herangezogen werden.<br />
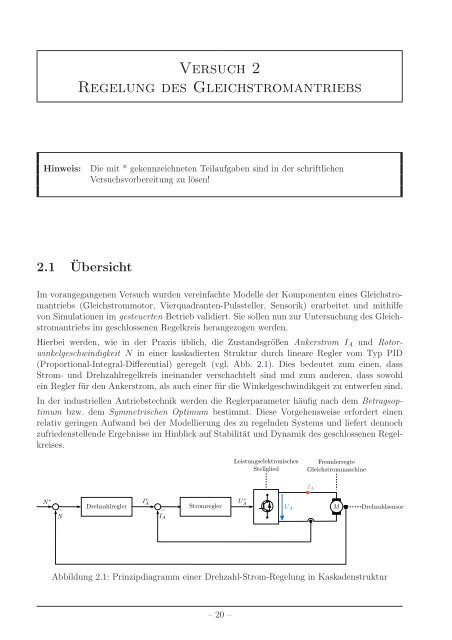
Hierbei werden, wie in der Praxis üblich, die Zustandsgrößen Ankerstrom I A und Rotorwinkelgeschwindigkeit<br />
N in einer kaskadierten Struktur durch lineare Regler vom Typ PID<br />
(Proportional-Integral-Differential) geregelt (vgl. Abb. 2.1). Dies bedeutet zum einen, dass<br />
Strom- und Drehzahlregelkreis ineinander verschachtelt sind und zum anderen, dass sowohl<br />
ein Regler <strong>für</strong> den Ankerstrom, als auch einer <strong>für</strong> die Winkelgeschwindikgeit zu entwerfen sind.<br />
In der industriellen Antriebstechnik werden die Reglerparameter häufig nach dem Betragsoptimum<br />
bzw. dem Symmetrischen Optimum bestimmt. Diese Vorgehensweise erfordert einen<br />
relativ geringen Aufwand bei der Modellierung des zu regelnden Systems und liefert dennoch<br />
zufriedenstellende Ergebnisse im Hinblick auf Stabilität und Dynamik des geschlossenen Regelkreises.<br />
Abbildung 2.1: Prinzipdiagramm einer Drehzahl-Strom-Regelung in Kaskadenstruktur<br />
– 20 –