Modellierung und Validierung der Krafterzeugung mit Stick-Slip ...
Modellierung und Validierung der Krafterzeugung mit Stick-Slip ...
Modellierung und Validierung der Krafterzeugung mit Stick-Slip ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
4.1. Einflüsse auf das Reibverhalten 83<br />
120<br />
0-Amplitude [%]<br />
100<br />
80<br />
60<br />
40<br />
20<br />
0<br />
Vorspannung 0,75N<br />
Vorspannung 0,5N<br />
Vorspannung 0,3N<br />
Vorspannung 0,2N<br />
Vorspannung 0,1N<br />
0 50 100 150 200 250 300<br />
Slewrate [V/µs]<br />
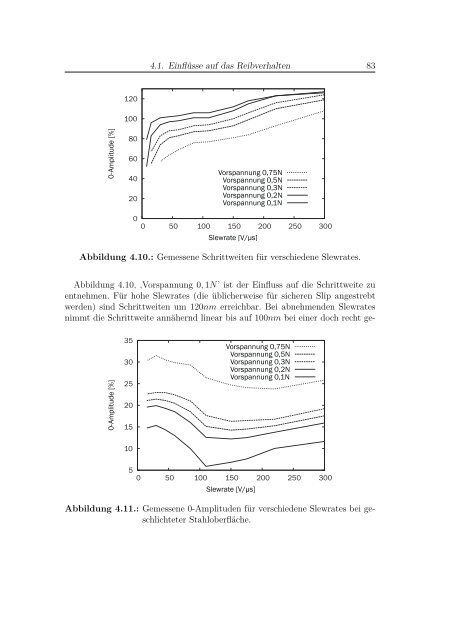
Abbildung 4.10.: Gemessene Schrittweiten für verschiedene Slewrates.<br />
Abbildung 4.10, ,Vorspannung 0, 1N’ ist <strong>der</strong> Einfluss auf die Schrittweite zu<br />
entnehmen. Für hohe Slewrates (die üblicherweise für sicheren <strong>Slip</strong> angestrebt<br />
werden) sind Schrittweiten um 120nm erreichbar. Bei abnehmenden Slewrates<br />
nimmt die Schrittweite annähernd linear bis auf 100nm bei einer doch recht ge-<br />
0-Amplitude [%]<br />
35<br />
30<br />
25<br />
20<br />
15<br />
Vorspannung 0,75N<br />
Vorspannung 0,5N<br />
Vorspannung 0,3N<br />
Vorspannung 0,2N<br />
Vorspannung 0,1N<br />
10<br />
5<br />
0 50 100 150 200 250 300<br />
Slewrate [V/µs]<br />
Abbildung 4.11.: Gemessene 0-Amplituden für verschiedene Slewrates bei geschlichteter<br />
Stahloberfläche.