Modellierung und Validierung der Krafterzeugung mit Stick-Slip ...
Modellierung und Validierung der Krafterzeugung mit Stick-Slip ...
Modellierung und Validierung der Krafterzeugung mit Stick-Slip ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
4 2. Stand <strong>der</strong> Forschung<br />
x, u<br />
m<br />
g<br />
F Reibung<br />
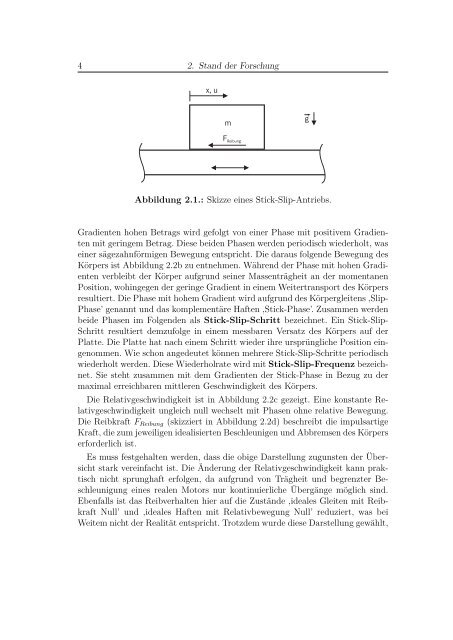
Abbildung 2.1.: Skizze eines <strong>Stick</strong>-<strong>Slip</strong>-Antriebs.<br />
Gradienten hohen Betrags wird gefolgt von einer Phase <strong>mit</strong> positivem Gradienten<br />
<strong>mit</strong> geringem Betrag. Diese beiden Phasen werden periodisch wie<strong>der</strong>holt, was<br />
einer sägezahnförmigen Bewegung entspricht. Die daraus folgende Bewegung des<br />
Körpers ist Abbildung 2.2b zu entnehmen. Während <strong>der</strong> Phase <strong>mit</strong> hohen Gradienten<br />
verbleibt <strong>der</strong> Körper aufgr<strong>und</strong> seiner Massenträgheit an <strong>der</strong> momentanen<br />
Position, wohingegen <strong>der</strong> geringe Gradient in einem Weitertransport des Körpers<br />
resultiert. Die Phase <strong>mit</strong> hohem Gradient wird aufgr<strong>und</strong> des Körpergleitens ,<strong>Slip</strong>-<br />
Phase’ genannt <strong>und</strong> das komplementäre Haften ,<strong>Stick</strong>-Phase’. Zusammen werden<br />
beide Phasen im Folgenden als <strong>Stick</strong>-<strong>Slip</strong>-Schritt bezeichnet. Ein <strong>Stick</strong>-<strong>Slip</strong>-<br />
Schritt resultiert demzufolge in einem messbaren Versatz des Körpers auf <strong>der</strong><br />
Platte. Die Platte hat nach einem Schritt wie<strong>der</strong> ihre ursprüngliche Position eingenommen.<br />
Wie schon angedeutet können mehrere <strong>Stick</strong>-<strong>Slip</strong>-Schritte periodisch<br />
wie<strong>der</strong>holt werden. Diese Wie<strong>der</strong>holrate wird <strong>mit</strong> <strong>Stick</strong>-<strong>Slip</strong>-Frequenz bezeichnet.<br />
Sie steht zusammen <strong>mit</strong> dem Gradienten <strong>der</strong> <strong>Stick</strong>-Phase in Bezug zu <strong>der</strong><br />
maximal erreichbaren <strong>mit</strong>tleren Geschwindigkeit des Körpers.<br />
Die Relativgeschwindigkeit ist in Abbildung 2.2c gezeigt. Eine konstante Relativgeschwindigkeit<br />
ungleich null wechselt <strong>mit</strong> Phasen ohne relative Bewegung.<br />
Die Reibkraft F Reibung (skizziert in Abbildung 2.2d) beschreibt die impulsartige<br />
Kraft, die zum jeweiligen idealisierten Beschleunigen <strong>und</strong> Abbremsen des Körpers<br />
erfor<strong>der</strong>lich ist.<br />
Es muss festgehalten werden, dass die obige Darstellung zugunsten <strong>der</strong> Übersicht<br />
stark vereinfacht ist. Die Än<strong>der</strong>ung <strong>der</strong> Relativgeschwindigkeit kann praktisch<br />
nicht sprunghaft erfolgen, da aufgr<strong>und</strong> von Trägheit <strong>und</strong> begrenzter Beschleunigung<br />
eines realen Motors nur kontinuierliche Übergänge möglich sind.<br />
Ebenfalls ist das Reibverhalten hier auf die Zustände ,ideales Gleiten <strong>mit</strong> Reibkraft<br />
Null’ <strong>und</strong> ,ideales Haften <strong>mit</strong> Relativbewegung Null’ reduziert, was bei<br />
Weitem nicht <strong>der</strong> Realität entspricht. Trotzdem wurde diese Darstellung gewählt,