Modellierung und Validierung der Krafterzeugung mit Stick-Slip ...
Modellierung und Validierung der Krafterzeugung mit Stick-Slip ...
Modellierung und Validierung der Krafterzeugung mit Stick-Slip ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
68 4. Theoretische Betrachtung <strong>der</strong> <strong>Stick</strong>-<strong>Slip</strong>-Reibung<br />
extrapolierte Gerade<br />
Schrittweite [nm]<br />
berechnete<br />
0-Amplitude<br />
a<br />
<br />
s<br />
0<br />
Amplitude [%]<br />
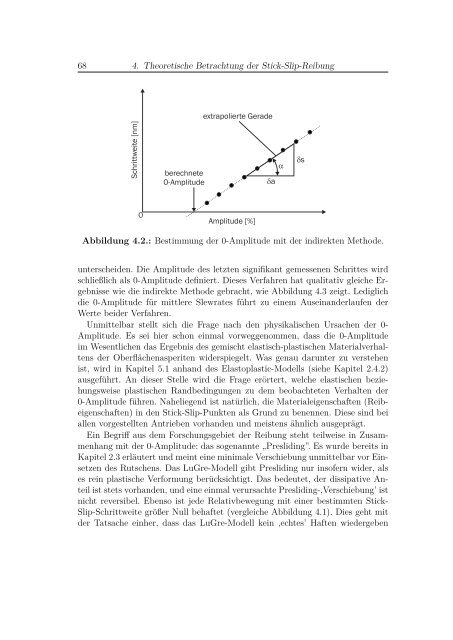
Abbildung 4.2.: Bestimmung <strong>der</strong> 0-Amplitude <strong>mit</strong> <strong>der</strong> indirekten Methode.<br />
unterscheiden. Die Amplitude des letzten signifikant gemessenen Schrittes wird<br />
schließlich als 0-Amplitude definiert. Dieses Verfahren hat qualitativ gleiche Ergebnisse<br />
wie die indirekte Methode gebracht, wie Abbildung 4.3 zeigt. Lediglich<br />
die 0-Amplitude für <strong>mit</strong>tlere Slewrates führt zu einem Auseinan<strong>der</strong>laufen <strong>der</strong><br />
Werte bei<strong>der</strong> Verfahren.<br />
Un<strong>mit</strong>telbar stellt sich die Frage nach den physikalischen Ursachen <strong>der</strong> 0-<br />
Amplitude. Es sei hier schon einmal vorweggenommen, dass die 0-Amplitude<br />
im Wesentlichen das Ergebnis des gemischt elastisch-plastischen Materialverhaltens<br />
<strong>der</strong> Oberflächenasperiten wi<strong>der</strong>spiegelt. Was genau darunter zu verstehen<br />
ist, wird in Kapitel 5.1 anhand des Elastoplastic-Modells (siehe Kapitel 2.4.2)<br />
ausgeführt. An dieser Stelle wird die Frage erörtert, welche elastischen beziehungsweise<br />
plastischen Randbedingungen zu dem beobachteten Verhalten <strong>der</strong><br />
0-Amplitude führen. Naheliegend ist natürlich, die Materialeigenschaften (Reibeigenschaften)<br />
in den <strong>Stick</strong>-<strong>Slip</strong>-Punkten als Gr<strong>und</strong> zu benennen. Diese sind bei<br />
allen vorgestellten Antrieben vorhanden <strong>und</strong> meistens ähnlich ausgeprägt.<br />
Ein Begriff aus dem Forschungsgebiet <strong>der</strong> Reibung steht teilweise in Zusammenhang<br />
<strong>mit</strong> <strong>der</strong> 0-Amplitude: das sogenannte „Presliding”. Es wurde bereits in<br />
Kapitel 2.3 erläutert <strong>und</strong> meint eine minimale Verschiebung un<strong>mit</strong>telbar vor Einsetzen<br />
des Rutschens. Das LuGre-Modell gibt Presliding nur insofern wi<strong>der</strong>, als<br />
es rein plastische Verformung berücksichtigt. Das bedeutet, <strong>der</strong> dissipative Anteil<br />
ist stets vorhanden, <strong>und</strong> eine einmal verursachte Presliding-,Verschiebung’ ist<br />
nicht reversibel. Ebenso ist jede Relativbewegung <strong>mit</strong> einer bestimmten <strong>Stick</strong>-<br />
<strong>Slip</strong>-Schrittweite größer Null behaftet (vergleiche Abbildung 4.1). Dies geht <strong>mit</strong><br />
<strong>der</strong> Tatsache einher, dass das LuGre-Modell kein ,echtes’ Haften wie<strong>der</strong>geben