Erfinderaktivitäten 2011 - DPMA
Erfinderaktivitäten 2011 - DPMA
Erfinderaktivitäten 2011 - DPMA

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>DPMA</strong> – <strong>Erfinderaktivitäten</strong> <strong>2011</strong><br />
ren zur Anpassung des Gesamt-Rotorfeldes an den Be-<br />
triebszustand erfolgt über den Verstellmechanismus<br />
mit Bezugszeichen (25). Die entsprechenden Ansteue-<br />
rungen des Antriebs sind in den Patentschriften DE 10<br />
2007 013 577 B4 und DE 10 2007 025 210 B4 dargelegt.<br />
Eine andere Möglichkeit besteht in der Verdrehung<br />
von axialen Rotorabschnitten per Stellmotor gegen-<br />
einander, wie sie die Figuren 21 und 22 zeigen.<br />
Diese Maßnahmen sind sowohl für motorischen als<br />
auch für generatorischen Betrieb anwendbar.<br />
Die Figur 23 zeigt die Ansteuerung des Doppelrotor-<br />
verstellmechanismus nach Figur 20 abhängig von der<br />
Zwischenkreisspannung, der geforderten Motorleis-<br />
tung sowie der Drehzahl in Bezug auf die Figur 19.<br />
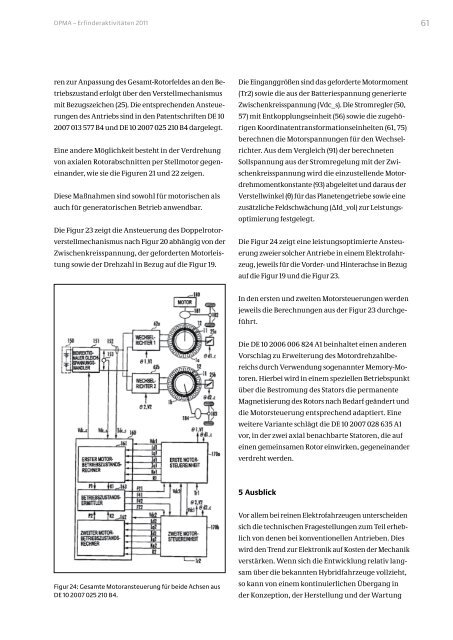
Figur 24: Gesamte Motoransteuerung für beide Achsen aus<br />
DE 10 2007 025 210 B4.<br />
Die Einganggrößen sind das geforderte Motormoment<br />
(Tr2) sowie die aus der Batteriespannung generierte<br />
Zwischenkreisspannung (Vdc_s). Die Stromregler (50,<br />
57) mit Entkopplungseinheit (56) sowie die zugehö-<br />
rigen Koordinatentransformationseinheiten (61, 75)<br />
berechnen die Motorspannungen für den Wechsel-<br />
richter. Aus dem Vergleich (91) der berechneten<br />
Sollspannung aus der Stromregelung mit der Zwi-<br />
schenkreisspannung wird die einzustellende Motor-<br />
drehmomentkonstante (93) abgeleitet und daraus der<br />
Verstellwinkel (θ) für das Planetengetriebe sowie eine<br />
zusätzliche Feldschwächung (ΔId_vol) zur Leistungs-<br />
optimierung festgelegt.<br />
Die Figur 24 zeigt eine leistungsoptimierte Ansteu-<br />
erung zweier solcher Antriebe in einem Elektrofahr-<br />
zeug, jeweils für die Vorder- und Hinterachse in Bezug<br />
auf die Figur 19 und die Figur 23.<br />
In den ersten und zweiten Motorsteuerungen werden<br />
jeweils die Berechnungen aus der Figur 23 durchge-<br />
führt.<br />
Die DE 10 2006 006 824 A1 beinhaltet einen anderen<br />
Vorschlag zu Erweiterung des Motordrehzahlbe-<br />
reichs durch Verwendung sogenannter Memory-Mo-<br />
toren. Hierbei wird in einem speziellen Betriebspunkt<br />
über die Bestromung des Stators die permanente<br />
Magnetisierung des Rotors nach Bedarf geändert und<br />
die Motorsteuerung entsprechend adaptiert. Eine<br />
weitere Variante schlägt die DE 10 2007 028 635 A1<br />
vor, in der zwei axial benachbarte Statoren, die auf<br />
einen gemeinsamen Rotor einwirken, gegeneinander<br />
verdreht werden.<br />
5 Ausblick<br />
Vor allem bei reinen Elektrofahrzeugen unterscheiden<br />
sich die technischen Fragestellungen zum Teil erheb-<br />
lich von denen bei konventionellen Antrieben. Dies<br />
wird den Trend zur Elektronik auf Kosten der Mechanik<br />
verstärken. Wenn sich die Entwicklung relativ lang-<br />
sam über die bekannten Hybridfahrzeuge vollzieht,<br />
so kann von einem kontinuierlichen Übergang in<br />
der Konzeption, der Herstellung und der Wartung<br />
61