Erfinderaktivitäten 2011 - DPMA
Erfinderaktivitäten 2011 - DPMA
Erfinderaktivitäten 2011 - DPMA

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>DPMA</strong> – <strong>Erfinderaktivitäten</strong> <strong>2011</strong><br />
3 Berücksichtigung des Abstands zum vorausfahrenden<br />
Fahrzeug<br />
3.1 Einsatz bei fließendem Verkehr<br />
Ein Großteil der Personen- und Sachschäden ist, vor<br />
allem auf Autobahnen, auf Auffahrunfälle zurück-<br />
zuführen, weshalb schon früh mit der Entwicklung<br />
von Geräten begonnen wurde, die für das Einhalten<br />
eines Sicherheitsabstands zum vorausfahrenden<br />
Fahrzeug sorgen sollten [6]. Diese Systeme warnten<br />
den Fahrer bei einem zu geringen Abstand zum Vor-<br />
dermann oder griffen direkt in die Motorsteuerung<br />
oder das Bremssystem ein (DE 26 42 211 A1). Um den<br />
Abstand zum vorausfahrenden Fahrzeug zu messen,<br />
wurden Lidar- und die teureren, aber witterungsun-<br />
abhängigeren Radar-Systeme vorgeschlagen [7]. Diese<br />
Systeme detektieren jedoch nicht nur das vorausfah-<br />
rende Zielfahrzeug, sondern auch Gegenstände am<br />
Rand der Fahrbahn oder Fahrzeuge auf benachbarten<br />
Spuren. Insbesondere in Kurven besteht daher die Ge-<br />
fahr von Fehlalarmen oder unmotivierten Eingriffen<br />
in das Bremssystem, was wiederum zu gefährlichen<br />
Situationen oder zumindest zu einer Irritation des<br />
Fahrers führen kann.<br />
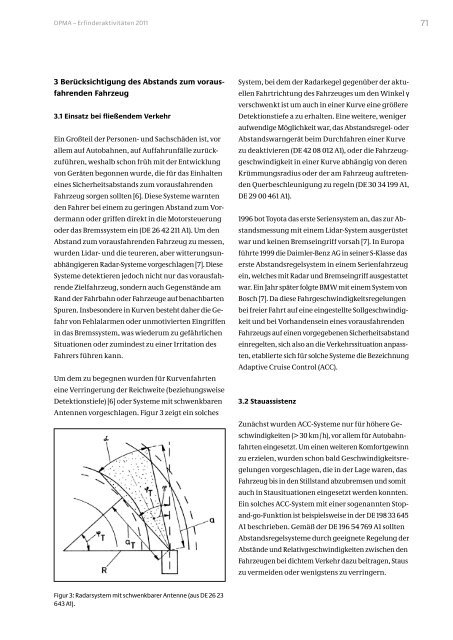
Um dem zu begegnen wurden für Kurvenfahrten<br />
eine Verringerung der Reichweite (beziehungsweise<br />
Detektionstiefe) [6] oder Systeme mit schwenkbaren<br />
Antennen vorgeschlagen. Figur 3 zeigt ein solches<br />
Figur 3: Radarsystem mit schwenkbarer Antenne (aus DE 26 23<br />
643 A1).<br />
System, bei dem der Radarkegel gegenüber der aktu-<br />
ellen Fahrtrichtung des Fahrzeuges um den Winkel γ<br />
verschwenkt ist um auch in einer Kurve eine größere<br />
Detektionstiefe a zu erhalten. Eine weitere, weniger<br />
aufwendige Möglichkeit war, das Abstandsregel- oder<br />
Abstandswarngerät beim Durchfahren einer Kurve<br />
zu deaktivieren (DE 42 08 012 A1), oder die Fahrzeug-<br />
geschwindigkeit in einer Kurve abhängig von deren<br />
Krümmungsradius oder der am Fahrzeug auftreten-<br />
den Querbeschleunigung zu regeln (DE 30 34 199 A1,<br />
DE 29 00 461 A1).<br />
1996 bot Toyota das erste Seriensystem an, das zur Ab-<br />
standsmessung mit einem Lidar-System ausgerüstet<br />
war und keinen Bremseingriff vorsah [7]. In Europa<br />
führte 1999 die Daimler-Benz AG in seiner S-Klasse das<br />
erste Abstandsregelsystem in einem Serienfahrzeug<br />
ein, welches mit Radar und Bremseingriff ausgestattet<br />
war. Ein Jahr später folgte BMW mit einem System von<br />
Bosch [7]. Da diese Fahrgeschwindigkeitsregelungen<br />
bei freier Fahrt auf eine eingestellte Sollgeschwindig-<br />
keit und bei Vorhandensein eines vorausfahrenden<br />
Fahrzeugs auf einen vorgegebenen Sicherheitsabstand<br />
einregelten, sich also an die Verkehrssituation anpass-<br />
ten, etablierte sich für solche Systeme die Bezeichnung<br />
Adaptive Cruise Control (ACC).<br />
3.2 Stauassistenz<br />
Zunächst wurden ACC-Systeme nur für höhere Ge-<br />
schwindigkeiten (> 30 km / h), vor allem für Autobahn-<br />
fahrten eingesetzt. Um einen weiteren Komfortgewinn<br />
zu erzielen, wurden schon bald Geschwindigkeitsre-<br />
gelungen vorgeschlagen, die in der Lage waren, das<br />
Fahrzeug bis in den Stillstand abzubremsen und somit<br />
auch in Stausituationen eingesetzt werden konnten.<br />
Ein solches ACC-System mit einer sogenannten Stop-<br />
and-go-Funktion ist beispielsweise in der DE 198 33 645<br />
A1 beschrieben. Gemäß der DE 196 54 769 A1 sollten<br />
Abstandsregelsysteme durch geeignete Regelung der<br />
Abstände und Relativgeschwindigkeiten zwischen den<br />
Fahrzeugen bei dichtem Verkehr dazu beitragen, Staus<br />
zu vermeiden oder wenigstens zu verringern.<br />
71