TPF-C Technology Plan - Exoplanet Exploration Program - NASA
TPF-C Technology Plan - Exoplanet Exploration Program - NASA
TPF-C Technology Plan - Exoplanet Exploration Program - NASA

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Chapter 4<br />
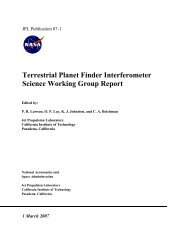
Figure 4-8. Comparison of passive isolation performance versus DFP performance for line-ofsight<br />
stability requirement.<br />
outputs. In this analysis, two reaction wheels were assumed to spin at the same speed with<br />
random phasing, the structural damping ratio was assumed to be 0.1%, and model uncertainty<br />
factors were also added to increase conservatism.<br />
Figure 4-8 illustrates the LOS performance for the passive isolation design (red line) and DFP<br />
(blue line), as well as the requirement (green line). The passive isolation design cannot alter the<br />
system response for frequencies below the isolator break frequency, typically ~2 Hz, but can<br />
achieve 40–60 dB attenuation per stage at frequencies sufficiently above the break frequency.<br />
Although the passive isolation design does not meet the LOS requirement at low wheel speeds, it<br />
is simple to limit wheel speeds to above 2 Hz where passive isolation can meet the requirement<br />
with a large margin. The DFP, on the other hand, does not have a theoretical limit in rejecting<br />
vibrations at low frequencies. As a result, the active DFP design can meet the LOS requirement<br />
for all wheel speeds and demonstrate vibration reduction about two orders of magnitude better<br />
than the passive isolation design.<br />
The wavefront error (WFE) due to telescope deformation, expressed in terms of the first 15<br />
Zernike amplitudes, is plotted in Figure 4-9. The top graph shows the margin in dB for each<br />
Zernike amplitude:<br />
⎛ max Z<br />
i<br />
( ω)<br />
⎞<br />
− 20 log<br />
⎜<br />
⎟,<br />
i = 4...15<br />
⎝ Ri<br />
⎠<br />
where Z i is the amplitude of Zernike mode i versus wheelspeed, and R i is the requirement for<br />
mode i. The bottom graph shows the peak Zernike amplitude from the passive isolation and DFP<br />
designs as blue and green lines, respectively, along with the requirement for each mode in<br />
66