- Page 9:
TABLE OF CONTENTSSECTION 1: SYSTEM
- Page 12 and 13:
TABLE OF CONTENTSBlank PageivGarmin
- Page 14:
SECTION 1SYSTEM OVERVIEW1.1 PFD/MFD
- Page 17 and 18:
SECTION 1SYSTEM OVERVIEW1.2 PFD SOF
- Page 19 and 20:
SECTION 1SYSTEM OVERVIEWGPS - Displ
- Page 21 and 22: SECTION 1SYSTEM OVERVIEWAIRWAYS - P
- Page 23 and 24: SECTION 1SYSTEM OVERVIEWLarge TextS
- Page 25 and 26: SECTION 1SYSTEM OVERVIEW2) Apply po
- Page 27 and 28: SECTION 2FLIGHT INSTRUMENTSSECTION
- Page 29 and 30: SECTION 2FLIGHT INSTRUMENTS2.1 AIRS
- Page 31 and 32: SECTION 2FLIGHT INSTRUMENTSMetric D
- Page 33 and 34: SECTION 2FLIGHT INSTRUMENTS2.5 MARK
- Page 35 and 36: SECTION 2FLIGHT INSTRUMENTSTurn Rat
- Page 37 and 38: SECTION 2FLIGHT INSTRUMENTSBearing
- Page 39 and 40: SECTION 2FLIGHT INSTRUMENTS2.10 GEN
- Page 41 and 42: SECTION 3 - ENGINEINDICATION SYSTEM
- Page 43 and 44: SECTION 3 - ENGINEINDICATION SYSTEM
- Page 45 and 46: SECTION 3 - ENGINEINDICATION SYSTEM
- Page 47 and 48: SECTION 3 - ENGINEINDICATION SYSTEM
- Page 49 and 50: SECTION 3 - ENGINEINDICATION SYSTEM
- Page 51 and 52: SECTION 4 - NAV/COM &TRANSPONDERSEC
- Page 53 and 54: SECTION 4 - NAV/COM &TRANSPONDER4.1
- Page 55 and 56: SECTION 4 - NAV/COM &TRANSPONDERAlt
- Page 57 and 58: SECTION 5 - AUDIO PANELSECTION 5: A
- Page 59 and 60: SECTION 5 - AUDIO PANEL5.3 NAV RADI
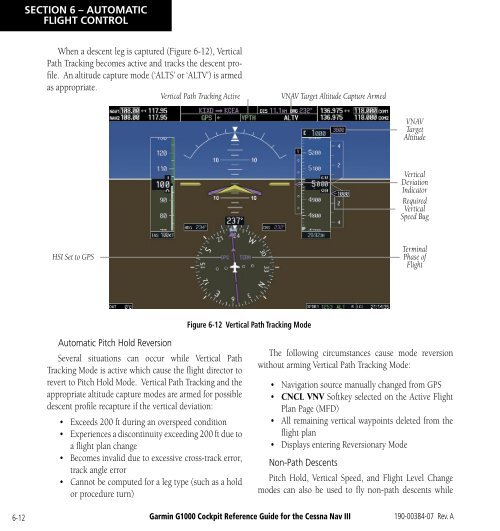
- Page 61 and 62: SECTION 6 - AUTOMATICFLIGHT CONTROL
- Page 63 and 64: SECTION 6 - AUTOMATICFLIGHT CONTROL
- Page 65 and 66: SECTION 6 - AUTOMATICFLIGHT CONTROL
- Page 67 and 68: SECTION 6 - AUTOMATICFLIGHT CONTROL
- Page 69 and 70: SECTION 6 - AUTOMATICFLIGHT CONTROL
- Page 71: SECTION 6 - AUTOMATICFLIGHT CONTROL
- Page 75 and 76: SECTION 6 - AUTOMATICFLIGHT CONTROL
- Page 77 and 78: SECTION 6 - AUTOMATICFLIGHT CONTROL
- Page 79 and 80: SECTION 6 - AUTOMATICFLIGHT CONTROL
- Page 81 and 82: SECTION 6 - AUTOMATICFLIGHT CONTROL
- Page 83 and 84: SECTION 6 - AUTOMATICFLIGHT CONTROL
- Page 85 and 86: SECTION 6 - AUTOMATICFLIGHT CONTROL
- Page 87 and 88: SECTION 6 - AUTOMATICFLIGHT CONTROL
- Page 89 and 90: SECTION 6 - AUTOMATICFLIGHT CONTROL
- Page 91 and 92: SECTION 6 - AUTOMATICFLIGHT CONTROL
- Page 93 and 94: SECTION 6 - AUTOMATICFLIGHT CONTROL
- Page 95 and 96: SECTION 6 - AUTOMATICFLIGHT CONTROL
- Page 97 and 98: SECTION 7 - NAVIGATIONSECTION 7: NA
- Page 99 and 100: SECTION 7 - NAVIGATIONFigure 7-5 Re
- Page 101 and 102: SECTION 7 - NAVIGATION4) Turn the l
- Page 103 and 104: SECTION 7 - NAVIGATION4) V4 will no
- Page 105 and 106: SECTION 7 - NAVIGATIONl) V4 is now
- Page 107 and 108: SECTION 7 - NAVIGATION10) At Lamar
- Page 109 and 110: SECTION 7 - NAVIGATIONb) ‘SELECT
- Page 111 and 112: SECTION 7 - NAVIGATIONa) Press the
- Page 113 and 114: SECTION 7 - NAVIGATION19) After pas
- Page 115 and 116: SECTION 7 - NAVIGATION23) After cro
- Page 117 and 118: SECTION 7 - NAVIGATION26) The aircr
- Page 119 and 120: SECTION 7 - NAVIGATIONAccess Runway
- Page 121 and 122: SECTION 7 - NAVIGATION7.8 USER WAYP
- Page 123:
SECTION 7 - NAVIGATION7.11 NEAREST
- Page 128 and 129:
SECTION 8 - FLIGHT PLANNINGCreate U
- Page 130 and 131:
SECTION 8 - FLIGHT PLANNING8.7 CREA
- Page 132 and 133:
SECTION 8 - FLIGHT PLANNING8) Turn
- Page 134 and 135:
SECTION 8 - FLIGHT PLANNING8.18 DEL
- Page 136 and 137:
SECTION 8 - FLIGHT PLANNINGBlank Pa
- Page 138 and 139:
SECTION 9 - PROCEDURES9.2 APPROACHE
- Page 140 and 141:
SECTION 9 - PROCEDURESBlank Page9-4
- Page 142 and 143:
SECTION 10 - HAZARDAVOIDANCEAt a ma
- Page 144 and 145:
SECTION 10 - HAZARDAVOIDANCEDisplay
- Page 146 and 147:
SECTION 10 - HAZARDAVOIDANCE• Fre
- Page 148 and 149:
SECTION 10 - HAZARDAVOIDANCETraffic
- Page 150 and 151:
SECTION 10 - HAZARDAVOIDANCE10.7 TE
- Page 152 and 153:
SECTION 10 - HAZARDAVOIDANCE3) Pres
- Page 154 and 155:
SECTION 10 - HAZARDAVOIDANCEExcessi
- Page 156 and 157:
SECTION 10 - HAZARDAVOIDANCETAWS Al
- Page 158 and 159:
SECTION 10 - HAZARDAVOIDANCEBlank P
- Page 160 and 161:
SECTION 11 - ABNORMALOPERATION11.2
- Page 162 and 163:
SECTION 11 - ABNORMALOPERATIONwill
- Page 164 and 165:
SECTION 12 - ANNUNCIATIONS& ALERTS1
- Page 166 and 167:
SECTION 12 - ANNUNCIATIONS& ALERTS1
- Page 168 and 169:
SECTION 12 - ANNUNCIATIONS& ALERTST
- Page 170 and 171:
SECTION 12 - ANNUNCIATIONS& ALERTSS
- Page 172 and 173:
SECTION 12 - ANNUNCIATIONS& ALERTSM
- Page 174 and 175:
SECTION 12 - ANNUNCIATIONS& ALERTSD
- Page 176 and 177:
SECTION 12 - ANNUNCIATIONS& ALERTSG
- Page 178 and 179:
SECTION 12 - ANNUNCIATIONS& ALERTSG
- Page 180 and 181:
SECTION 12 - ANNUNCIATIONS& ALERTSG
- Page 182 and 183:
SECTION 12 - ANNUNCIATIONS& ALERTSG
- Page 184 and 185:
SECTION 12 - ANNUNCIATIONS& ALERTSM
- Page 186 and 187:
INDEXFLTA 10-13Forward Looking Terr
- Page 188:
INDEXWeather product symbol 10-5Wea