European Journal of Scientific Research - EuroJournals
European Journal of Scientific Research - EuroJournals
European Journal of Scientific Research - EuroJournals

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Development <strong>of</strong> Mechanical Prosthetic Hand System for BCI Application 866<br />
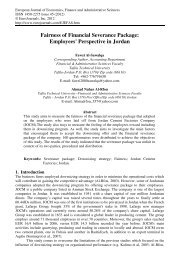
Figure 3: Prosthetic finger<br />
Each phalanx is made from 2-parallel aluminum plate <strong>of</strong> 1.5mm thickness and join using a<br />
brass spacer bolted with 2mm diameter stainless steel screw. DC motors with the combination <strong>of</strong><br />
reduced gear heads are used to actuate finger segments. Process <strong>of</strong> determining the length <strong>of</strong> the<br />
phalanx acquired the implementation <strong>of</strong> the Fibonacci sequence. Fibonacci sequence in application to<br />
the human hand stated that; the difference between the length <strong>of</strong> the next phalanx and the sum length <strong>of</strong><br />
the two prior phalanges must equal to zero. The sum <strong>of</strong> the distal phalanx and the middle phalanx<br />
should be equal to the length <strong>of</strong> the proximal phalanx. However, Park et al [6] in his work has showed<br />
that the bone lengths <strong>of</strong> the finger does not follow the Fibonacci relationship but the motion paths <strong>of</strong><br />
the digits still form an equiangular spiral path. Therefore to achieve the equiangular spiral motion path<br />
the respective length that representing each segment should include the absolute bone length and<br />
functional length (radius <strong>of</strong> the joint). Length <strong>of</strong> each segment was referred to author’s hand herself<br />
and using the Hamilton’s ratio [7] to verify that the chosen length is sufficient to form an equiangular<br />
spiral motion.<br />
All the fabrication and machining process was done in the mechanical workshop in the<br />
Department <strong>of</strong> Mechanical Engineering, University <strong>of</strong> Malaya, Malaysia. The precise machining was<br />
carried out using a CNC (computer numerical control) wire EDM (electrical discharge machining)<br />
machine Sodick, available in the Department <strong>of</strong> Manufacturing and Design, University <strong>of</strong> Malaya,<br />
Malaysia.<br />
3.0. Result<br />
A prototype <strong>of</strong> prosthetic hand was successfully fabricated and tested for functionality, performance<br />
and strength. Figure 4 shows the flow diagram <strong>of</strong> a BCI system to control prosthetic hand developed by<br />
Biomedical Engineering BCI group, University <strong>of</strong> Malaya. A fuzzy controller is used to control the<br />
prosthetic hand. Input for controller is fed from the BCI box. EEG signals acquired from subject is<br />
amplified and converted to digital signal. The signal is further process and classified before send to<br />
fuzzy controller.