European Journal of Scientific Research - EuroJournals
European Journal of Scientific Research - EuroJournals
European Journal of Scientific Research - EuroJournals

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Robust Control <strong>of</strong> a Doubly Fed Asynchronous Machine <strong>of</strong> a Wind Turbine System 799<br />
⎡ Rr<br />
M ⎢<br />
L<br />
= − ⋅ ⎢ r<br />
Lr<br />
⎢ w<br />
⎢<br />
⎣<br />
⎤<br />
w ⎥<br />
⎥<br />
Rr<br />
− ⎥<br />
L ⎥ r ⎦<br />
C ,<br />
⎡ 2<br />
M<br />
⎢Rs<br />
+ ⋅ R<br />
2<br />
= ⎢ L<br />
D<br />
r<br />
⎢<br />
⎢ σ ⋅ Ls.<br />
W<br />
⎢⎣<br />
r<br />
− σ ⋅ L . W<br />
M<br />
Rs<br />
+<br />
L<br />
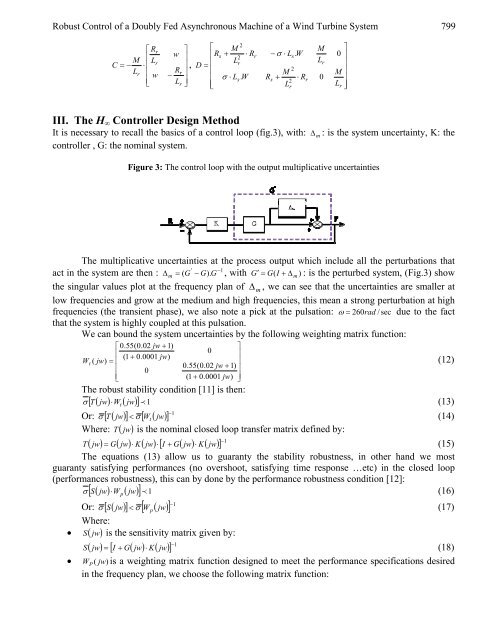
III. The H∞ Controller Design Method<br />
It is necessary to recall the basics <strong>of</strong> a control loop (fig.3), with: Δ m : is the system uncertainty, K: the<br />
controller , G: the nominal system.<br />
s<br />
2<br />
2<br />
r<br />
⋅ R<br />
r<br />
M<br />
L<br />
r<br />
0<br />
⎤<br />
0 ⎥<br />
⎥<br />
M ⎥<br />
⎥<br />
Lr<br />
⎥⎦<br />
Figure 3: The control loop with the output multiplicative uncertainties<br />
The multiplicative uncertainties at the process output which include all the perturbations that<br />
' −1<br />
act in the system are then : Δm = ( G − G).<br />
G , with G′ = G(<br />
I + Δ m ) : is the perturbed system, (Fig.3) show<br />
the singular values plot at the frequency plan <strong>of</strong> Δ m , we can see that the uncertainties are smaller at<br />
low frequencies and grow at the medium and high frequencies, this mean a strong perturbation at high<br />
frequencies (the transient phase), we also note a pick at the pulsation: ω = 260rad / sec due to the fact<br />
that the system is highly coupled at this pulsation.<br />
We can bound the system uncertainties by the following weighting matrix function:<br />
⎡ 0.<br />
55(<br />
0.<br />
02 jw + 1)<br />
⎢<br />
( 1 + 0.<br />
0001 jw)<br />
( jw)<br />
= ⎢<br />
⎢ 0<br />
⎢⎣<br />
⎤<br />
0 ⎥<br />
⎥<br />
0.<br />
55(<br />
0.<br />
02 jw + 1)<br />
⎥<br />
( 1 + 0.<br />
0001 jw)<br />
⎥⎦<br />
W t (12)<br />
The robust stability condition [11] is then:<br />
σ [ T ( jw)<br />
⋅Wt<br />
( jw)<br />
] ≺ 1<br />
(13)<br />
Or: [ ( ) ] [ ( ) ] 1 −<br />
σ T jw < σ Wt<br />
jw<br />
(14)<br />
Where: T ( jw)<br />
is the nominal closed loop transfer matrix defined by:<br />
( ) ( ) ( ) [ ( ) ( ) ] 1 −<br />
T jw = G jw ⋅ K jw ⋅ I + G jw ⋅ K jw<br />
(15)<br />
The equations (13) allow us to guaranty the stability robustness, in other hand we most<br />
guaranty satisfying performances (no overshoot, satisfying time response …etc) in the closed loop<br />
(performances robustness), this can by done by the performance robustness condition [12]:<br />
σ [ S( jw)<br />
⋅W<br />
p ( jw)<br />
] ≺ 1<br />
(16)<br />
Or: [ ( ) ] [ ( ) ] 1 −<br />
σ S jw < σ Wp<br />
jw<br />
(17)<br />
Where:<br />
• S ( jw)<br />
is the sensitivity matrix given by:<br />
( ) [ ( ) ( ) ] 1 −<br />
S jw = I + G jw ⋅ K jw<br />
(18)<br />
• WP ( jw)<br />
is a weighting matrix function designed to meet the performance specifications desired<br />
in the frequency plan, we choose the following matrix function: