European Journal of Scientific Research - EuroJournals
European Journal of Scientific Research - EuroJournals
European Journal of Scientific Research - EuroJournals

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
765 Rabindra Ku. Jena, Musbah M. Aqel, Gopal K. Sharma and Prabhat K. Mahanti<br />
continues with solutions <strong>of</strong> the second non-dominated front, followed by the third non-dominated front<br />
and so on. Since the overall population size <strong>of</strong> Rt is 2N, not all fronts may be accommodated in N slots<br />
available in the new population. All fronts which could not be accommodated are simply deleted.<br />
When the last allowed front is being considered, there may exist more solutions in the last front than<br />
the remaining slots in the new population. This scenario is illustrated in Figure 4. Instead <strong>of</strong> arbitrarily<br />
discarding some members <strong>of</strong> the last front, it would be wise to use a niching strategy to choose the<br />
members <strong>of</strong> the last front, which reside in the least crowded region in that front. But we will not go into<br />
too much detail on that. For more details refer to (Deb, 2002).<br />
6. Problem Formulation<br />
6.1. Basic Idea<br />
Like other algorithms in area <strong>of</strong> design automation, the algorithm <strong>of</strong> NoC communication architecture<br />
is a hard problem. Our attempt is to develop an algorithm that can give near optimal solution within<br />
reasonable time. Genetic algorithms have shown the potential to achieve the dual goal quite well (Jena<br />
et al, 2006; Lahiri et al, 2000; Srinivasan and Chatha, 2005).<br />
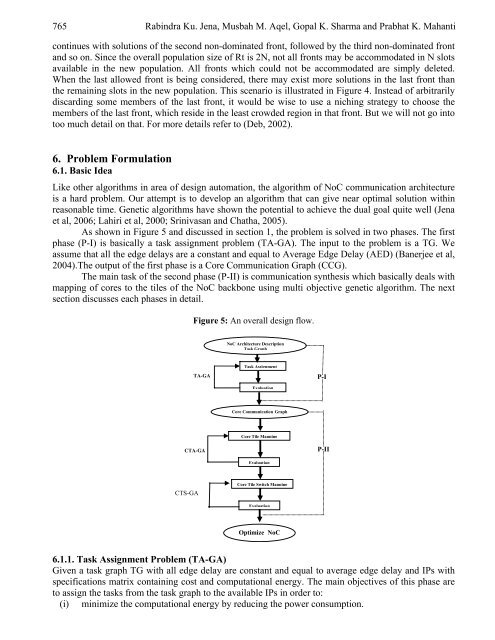
As shown in Figure 5 and discussed in section 1, the problem is solved in two phases. The first<br />
phase (P-I) is basically a task assignment problem (TA-GA). The input to the problem is a TG. We<br />
assume that all the edge delays are a constant and equal to Average Edge Delay (AED) (Banerjee et al,<br />
2004).The output <strong>of</strong> the first phase is a Core Communication Graph (CCG).<br />
The main task <strong>of</strong> the second phase (P-II) is communication synthesis which basically deals with<br />
mapping <strong>of</strong> cores to the tiles <strong>of</strong> the NoC backbone using multi objective genetic algorithm. The next<br />
section discusses each phases in detail.<br />
Figure 5: An overall design flow.<br />
TA-GA<br />
CTA-GA<br />
CTS-GA<br />
NoC Architecture Description<br />
Task Graph<br />
Task Assignment<br />
Evaluation<br />
Core Communication Graph<br />
Core Tile Mapping<br />
Evaluation<br />
Core Tile Switch Mapping<br />
Evaluation<br />
Optimize NoC<br />
6.1.1. Task Assignment Problem (TA-GA)<br />
Given a task graph TG with all edge delay are constant and equal to average edge delay and IPs with<br />
specifications matrix containing cost and computational energy. The main objectives <strong>of</strong> this phase are<br />
to assign the tasks from the task graph to the available IPs in order to:<br />
(i) minimize the computational energy by reducing the power consumption.<br />
P-I<br />
P-II