Dispense del corso (aggiornate al 10 giugno 2012) - Costruzione di ...
Dispense del corso (aggiornate al 10 giugno 2012) - Costruzione di ...
Dispense del corso (aggiornate al 10 giugno 2012) - Costruzione di ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Appunti <strong>di</strong> <strong>Costruzione</strong> <strong>di</strong> Macchine 2a cura <strong>di</strong>Stefano BerettaPolitecnico <strong>di</strong> Milano, Dipartimento <strong>di</strong> Meccanica<strong>10</strong> <strong>giugno</strong> <strong>2012</strong>
In<strong>di</strong>ceI An<strong>al</strong>isi stato <strong>di</strong> sforzo e deformazione 41 Richiami <strong>di</strong> An<strong>al</strong>isi <strong>del</strong>lo stato <strong>di</strong> sforzo 51.1 Azioni-reazioni e sforzi . . . . . . . . . . . . . . . . . . . . . . . . 51.1.1 Tensore degli sforzi . . . . . . . . . . . . . . . . . . . . . . 61.2 Sforzo agente su un piano generico . . . . . . . . . . . . . . . . . 71.2.1 Trasformazione riferimento per sforzo piano . . . . . . . . 81.3 Sforzi princip<strong>al</strong>i . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.3.1 Sforzi princip<strong>al</strong>i nello stato <strong>di</strong> sforzo piano . . . . . . . . . 111.4 Riferimento princip<strong>al</strong>e . . . . . . . . . . . . . . . . . . . . . . . . 131.4.1 Sforzi norm<strong>al</strong>i e tangenzi<strong>al</strong>i su un piano generico . . . . . 141.4.2 Cerchi <strong>di</strong> Mohr . . . . . . . . . . . . . . . . . . . . . . . . 151.4.3 Stato <strong>di</strong> sforzo su piani ottaedr<strong>al</strong>i . . . . . . . . . . . . . . 161.4.4 Componente <strong>di</strong> sforzo idrostatica e deviatorica . . . . . . 171.5 Equazioni indefinite <strong>di</strong> equilibrio . . . . . . . . . . . . . . . . . . 181.5.1 Riferimento cilindrico . . . . . . . . . . . . . . . . . . . . 181.5.2 Riferimento sferico . . . . . . . . . . . . . . . . . . . . . . 191.6 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202 Deformazioni e legame sforzi-deformazioni 222.1 Spostamenti e piccole deformazioni . . . . . . . . . . . . . . . . . 222.2 Tensore <strong>del</strong>le deformazioni . . . . . . . . . . . . . . . . . . . . . . 242.2.1 Deformazione in una <strong>di</strong>rezione nei problemi piani . . . . . 252.2.2 Deformazione volumica . . . . . . . . . . . . . . . . . . . 272.3 Variazione <strong>del</strong>le deformazioni in un continuo - Equazioni <strong>di</strong> congruenza. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.3.1 Problemi bi<strong>di</strong>mension<strong>al</strong>i . . . . . . . . . . . . . . . . . . . 282.3.2 Problemi tri<strong>di</strong>mension<strong>al</strong>i . . . . . . . . . . . . . . . . . . . 292.3.3 Compatibilità per il FEM* . . . . . . . . . . . . . . . . . 292.4 Legame elastico lineare per materi<strong>al</strong>i isotropi . . . . . . . . . . . 312.4.1 Direzione sforzi e deformazioni princip<strong>al</strong>i . . . . . . . . . . 322.4.2 Sforzo idrostatico e deformazione volumica . . . . . . . . 332.5 Legame sforzi-deformazioni in campo elastico . . . . . . . . . . . 342.5.1 Convenzione degli in<strong>di</strong>ci ripetuti . . . . . . . . . . . . . . 342.5.2 Legge <strong>di</strong> Hooke gener<strong>al</strong>izzata . . . . . . . . . . . . . . . . 351
2.5.3 Rappresentazione matrici<strong>al</strong>e . . . . . . . . . . . . . . . . . 362.5.4 Simmetria nei materi<strong>al</strong>i . . . . . . . . . . . . . . . . . . . 382.5.5 Materi<strong>al</strong>e anisotropo . . . . . . . . . . . . . . . . . . . . . 412.5.6 Materi<strong>al</strong>e ortotropo . . . . . . . . . . . . . . . . . . . . . 412.5.7 Materi<strong>al</strong>e isotropo . . . . . . . . . . . . . . . . . . . . . . 422.6 Appen<strong>di</strong>ce . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45II Problemi elastici 463 Soluzione an<strong>al</strong>itica <strong>di</strong> problemi elastici piani 473.1 Problemi piani . . . . . . . . . . . . . . . . . . . . . . . . . . . . 473.1.1 Stato <strong>di</strong> sforzo piano . . . . . . . . . . . . . . . . . . . . . 473.1.2 Stato <strong>di</strong> deformazione piana . . . . . . . . . . . . . . . . . 483.1.3 Soluzione . . . . . . . . . . . . . . . . . . . . . . . . . . . 493.2 Funzione <strong>di</strong> Airy . . . . . . . . . . . . . . . . . . . . . . . . . . . 503.2.1 Semplici esempi <strong>di</strong> funzione Φ . . . . . . . . . . . . . . . . 503.2.2 Soluzioni per serie . . . . . . . . . . . . . . . . . . . . . . 513.3 Problemi in coor<strong>di</strong>nate polari . . . . . . . . . . . . . . . . . . . . 543.3.1 Membrana forata soggetta a carico biassi<strong>al</strong>e . . . . . . . . 553.3.2 Foro in una membrana indefinita soggetto a carico ra<strong>di</strong><strong>al</strong>e 563.3.3 Membrana forata soggetta a taglio . . . . . . . . . . . . . 583.3.4 Membrana forata soggetta a carico assi<strong>al</strong>e . . . . . . . . . 593.3.5 Carico concentrato su un semispazio elastico . . . . . . . 633.4 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 664 Intagli e concentrazione <strong>di</strong> sforzo 674.1 Concentrazione <strong>di</strong> sforzo nella membrana forata . . . . . . . . . . 674.2 Membrana con foro ellittico . . . . . . . . . . . . . . . . . . . . . 694.3 Determinazione <strong>del</strong>lo stato <strong>di</strong> sforzo in organi <strong>di</strong> macchina . . . . 704.3.1 Ellisse equiv<strong>al</strong>ente . . . . . . . . . . . . . . . . . . . . . . 704.3.2 Intagli multipli . . . . . . . . . . . . . . . . . . . . . . . . 724.3.3 Sovrapposizione degli effetti . . . . . . . . . . . . . . . . . 735 Problemi assi<strong>al</strong>simmetrici 765.1 Problema termoelastico lineare . . . . . . . . . . . . . . . . . . . 765.2 Dischi sottili . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 785.2.1 Disco con sole pressioni sui contorni . . . . . . . . . . . . 805.2.2 Disco rotante a ω costante . . . . . . . . . . . . . . . . . . 845.2.3 Metodo <strong>di</strong> Grammel . . . . . . . . . . . . . . . . . . . . . 895.3 Cilindri lunghi . . . . . . . . . . . . . . . . . . . . . . . . . . . . 905.3.1 Cilindro rotante a velocità angolare costante . . . . . . . 925.4 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 952
6 Lastre circolari piane 976.1 Flessione semplice <strong>di</strong> una lastra in due <strong>di</strong>rezioni ortogon<strong>al</strong>i . . . . 976.1.1 Composizione dei momenti in un punto . . . . . . . . . . 986.1.2 Lastre con momento uniforme . . . . . . . . . . . . . . . . <strong>10</strong>06.2 Lastre circolari assi<strong>al</strong>simmetriche . . . . . . . . . . . . . . . . . . <strong>10</strong>06.2.1 Carico <strong>di</strong>stribuito . . . . . . . . . . . . . . . . . . . . . . . <strong>10</strong>36.2.2 Carico concentrato . . . . . . . . . . . . . . . . . . . . . . <strong>10</strong>56.2.3 Lastra anulare . . . . . . . . . . . . . . . . . . . . . . . . <strong>10</strong>76.3 Esercizi e problemi sul quaderno . . . . . . . . . . . . . . . . . . <strong>10</strong>97 Lastre cilindriche 1<strong>10</strong>7.1 Risoluzione <strong>del</strong> problema elastico . . . . . . . . . . . . . . . . . . 1<strong>10</strong>7.1.1 Deformazioni ed azioni sul concio <strong>di</strong> lastra . . . . . . . . . 1127.1.2 Equazione risolvente . . . . . . . . . . . . . . . . . . . . . 1147.1.3 Un approccio basato sulla teoria <strong>del</strong>le travi . . . . . . . . 1147.1.4 Integr<strong>al</strong>i particolari . . . . . . . . . . . . . . . . . . . . . . 1167.2 Cilindri lunghi caricati su un bordo . . . . . . . . . . . . . . . . . 1167.2.1 Coefficienti <strong>di</strong> bordo . . . . . . . . . . . . . . . . . . . . . 1217.3 Applicazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1217.3.1 Forza ra<strong>di</strong><strong>al</strong>e su un par<strong>al</strong>lelo . . . . . . . . . . . . . . . . 1217.3.2 Vincolo ra<strong>di</strong><strong>al</strong>e su un tubo . . . . . . . . . . . . . . . . . 1227.3.3 Cerchiatura <strong>del</strong> tubo . . . . . . . . . . . . . . . . . . . . . 1247.4 Recipienti cilindrici . . . . . . . . . . . . . . . . . . . . . . . . . . 1267.4.1 Fon<strong>di</strong> sferici . . . . . . . . . . . . . . . . . . . . . . . . . . 1277.4.2 Recipiente con fon<strong>di</strong> semisferici . . . . . . . . . . . . . . . 1287.4.3 Altri recipienti . . . . . . . . . . . . . . . . . . . . . . . . 1297.5 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130III Applicazioni ed organi <strong>di</strong> macchina 1318 Fatica degli elementi s<strong>al</strong>dati 1328.1 Introduzione <strong>al</strong>la resistenza a fatica dei giunti s<strong>al</strong>dati . . . . . . . 1328.2 Approccio agli sforzi nomin<strong>al</strong>i secondo le normative . . . . . . . . 1398.2.1 Effetto <strong>del</strong>lo sforzo me<strong>di</strong>o . . . . . . . . . . . . . . . . . . 1448.2.2 Multiassi<strong>al</strong>ità degli sforzi . . . . . . . . . . . . . . . . . . 1448.2.3 Sforzi ad ampiezza variabile . . . . . . . . . . . . . . . . . 1458.3 Metodo hot-spot . . . . . . . . . . . . . . . . . . . . . . . . . . . 1498.4 Difetti <strong>di</strong> s<strong>al</strong>datura e c<strong>al</strong>colo <strong>del</strong>la vita a fatica . . . . . . . . . . 1588.5 Accorgimenti <strong>di</strong> fabbricazione per aumentare la resistenza a fatica 1623
Parte IAn<strong>al</strong>isi stato <strong>di</strong> sforzo edeformazione4
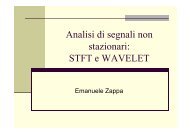
Capitolo 1Richiami <strong>di</strong> An<strong>al</strong>isi <strong>del</strong>lo stato<strong>di</strong> sforzoSi richiamano qui i concetti fondament<strong>al</strong>i <strong>del</strong>lo stato <strong>di</strong> sforzo nei soli<strong>di</strong>, già visti nel Corso<strong>di</strong> <strong>Costruzione</strong> <strong>di</strong> Macchine 1. Questi concetti ci serviranno quin<strong>di</strong>, nei capitoli successivi,per an<strong>al</strong>izzare il legame con le deformazioni e lo stato <strong>di</strong> sollecitazione in <strong>di</strong>versi tipi <strong>di</strong>problemi elastici relativi <strong>al</strong>lo stato <strong>di</strong> sforzo in organi <strong>del</strong>le macchine 1 .I testi <strong>di</strong> riferimento per consultazione ed approfon<strong>di</strong>mento sono: [1], [2], [3].1.1 Azioni-reazioni e sforziConsideriamo un corpo soggetto a forze esterne, come mostrato in Fig. 1.1,che generano <strong>del</strong>le azioni interne <strong>al</strong>l’interno <strong>del</strong> corpo. Per esaminarne l’effettoin un punto Q interno <strong>al</strong> corpo, tagliamo il corpo su un piano a-a (passanteper Q), che <strong>di</strong>vida il corpo in due parti. Le forze che agiscono sulla parte checonsideriamo devono essere equilibrate da <strong>del</strong>le forze presenti sulla sezione a-a.An<strong>al</strong>izziamo ora un piccolo elemento <strong>di</strong> area ∆A intorno <strong>al</strong> punto Q e chiamiamo∆F la forza agente su ∆A: chiamiamo ∆F x -∆F y -∆F z le componenti <strong>di</strong>∆F rispetto ad una terna loc<strong>al</strong>e x − y − z (l’asse x è <strong>di</strong>retto perpen<strong>di</strong>colarmentea ∆A) . Le componenti <strong>di</strong> ∆F danno origine ad uno stato <strong>di</strong> sforzo definitocome:∆F xσ x = lim∆A→0⎧⎪ ∆A⎨∆F y⎪ ⎩τ xy =τ xz =lim∆A→0lim∆A→0∆A ,∆F z∆A(1.1)1 a cura <strong>di</strong> S. Beretta5
Figura 1.1: Azioni e reazioni interne: a) sezione <strong>del</strong> corpo; b) equilibrio tra azionied azioni interne; c) componenti <strong>di</strong> ∆F [2].Queste definizioni forniscono le componenti <strong>del</strong>lo stato <strong>di</strong> sforzo nel punto Q suun piano <strong>di</strong> norm<strong>al</strong>e x. La definizione ∆A → 0 ha un significato ingegneristico:consideriamo sforzi me<strong>di</strong> su aree piccole in confronto <strong>al</strong>la <strong>di</strong>mensione <strong>del</strong> corpo,ma maggiori <strong>del</strong>le <strong>di</strong>mensioni microstruttur<strong>al</strong>i <strong>del</strong> materi<strong>al</strong>e <strong>di</strong> cui è costituitoil componente.La componente <strong>di</strong> ∆F norm<strong>al</strong>e <strong>al</strong>la superficie da origine ad uno sforzo norm<strong>al</strong>e,mentre le componenti par<strong>al</strong>lele <strong>al</strong>la superficie danno origine a sforzi <strong>di</strong> taglio.Dimension<strong>al</strong>mente, per la (1.1), gli sforzi sono espressi come [forza/superficie]e sono quin<strong>di</strong> espressi in [P a] oppure [MP a].1.1.1 Tensore degli sforziGener<strong>al</strong>izzando quanto visto sopra, se consideriamo nel punto Q i piani perpen<strong>di</strong>colariagli assi y e z definiamo in modo completo lo stato <strong>di</strong> sforzo nelpunto, connesso <strong>al</strong>le azioni interne, che è identificato da 9 componenti sc<strong>al</strong>ariche possiamo così rappresentare nell’intorno <strong>di</strong> un punto materi<strong>al</strong>e (il cubettino<strong>di</strong> Fig.1.2 si immagina abbia <strong>di</strong>mensioni evanescenti).Le convenzioni che pren<strong>di</strong>amo in t<strong>al</strong>e rappresentazione sono:• la notazione σ ij si riferisce rispettivamente a sforzo agente sulla faccia -i-(i è la norm<strong>al</strong>e <strong>al</strong>la faccia) in <strong>di</strong>rezione -j- ;• per le facce la cui norm<strong>al</strong>e uscente è <strong>di</strong>retta come uno degli assi coor<strong>di</strong>nati,il segno <strong>del</strong>le componenti <strong>del</strong> tensore sono positive con la <strong>di</strong>rezione degliassi mentre per le facce aventi norm<strong>al</strong>e uscente contraria agli assi sonoinvece positive le componenti sforzo aventi <strong>di</strong>rezione contraria agli assi.Per l’equilibrio <strong>al</strong>la rotazione <strong>di</strong> una porzione <strong>di</strong> materi<strong>al</strong>e infinitesima intorno<strong>al</strong> punto deve essere:σ ij = σ ji per i ≠ j (1.2)quin<strong>di</strong> le componenti <strong>di</strong> sforzo in<strong>di</strong>pendenti sono solo sei e le componenti <strong>del</strong>tensore degli sforzi, secondo il riferimento cartesiano x − y − z, possono essere6
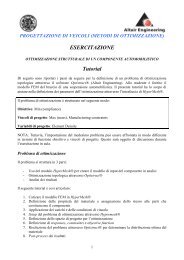
appresentati da un tensore <strong>del</strong> secondo or<strong>di</strong>ne 2 :⎡⎤σ xx σ xy σ xz[σ ij ] = ⎣σ xy σ yy σ yz⎦ (1.3)σ xz σ yz σ zzLe componenti <strong>del</strong>lo stato <strong>di</strong> sforzo, come rappresentato da [σ ij ] cambiano <strong>al</strong>variare <strong>del</strong>le <strong>di</strong>rezioni secondo cui si immagina <strong>di</strong> sezionare il corpo nel puntoQ (cambia da punto a punto nel corpo per effetto <strong>del</strong>la variazione <strong>del</strong>la forza∆F). Nel seguito vedremo come cambiano queste componenti <strong>al</strong> ruotare degliassi x, y, z.1.2 Sforzo agente su un piano genericoLo stato <strong>di</strong> sforzo agente su un piano generico si ricava me<strong>di</strong>ante le relazioni <strong>del</strong>’tetraedro <strong>di</strong> Cauchy’ già viste nel <strong>corso</strong> <strong>di</strong> <strong>Costruzione</strong> <strong>di</strong> Macchine 1 [4].In particolare se consideriamo un piano la cui norm<strong>al</strong>e è identificata daicoseni <strong>di</strong>rettori [i, l, m] ([i, l, m] sono le componenti, nel sistema <strong>di</strong> riferimentox − y − z, <strong>del</strong> versore −→ n <strong>del</strong>la norm<strong>al</strong>e <strong>al</strong> piano), il vettore <strong>del</strong>la forza unitariaS (forza per unità <strong>di</strong> superficie) agente sul piano è:⎡ ⎤ ⎡ ⎤S−→ xiS = ⎣S y⎦ = [σ ij ] · ⎣ l ⎦ (1.4)S z mFigura 1.2: Generico stato <strong>di</strong> sforzo.2 v<strong>al</strong>e la notazione: σ ii = σ i e σ ij = τ ij .7
lo sforzo norm<strong>al</strong>e σ n agente sul piano <strong>di</strong> norm<strong>al</strong>e −→ n non è <strong>al</strong>tro che la proiezione<strong>di</strong> −→ S su −→ n ovvero:⎡ ⎤σ n = −→ S × −→ n = [ i l m ] i· [σ ij ] · ⎣ l ⎦ (1.5)mLa procedura sopravista potrebbe essere utilizzata per proiettare −→ S su <strong>di</strong>rezioni<strong>di</strong>verse da −→ n permettendo così <strong>di</strong> ottenere componenti <strong>di</strong> sforzo su t<strong>al</strong>i <strong>di</strong>rezioni.Gener<strong>al</strong>izzando quin<strong>di</strong> la procedura <strong>del</strong>la eq.(1.5) si può esprimere il tensore <strong>di</strong>sforzo [σ ij ] d<strong>al</strong> riferimento X − Y − Z <strong>al</strong> un <strong>al</strong>tro riferimento X ′ − Y ′ − Z ′ . Inparticolare possiamo scrivere:dove:[σ ′ ij] = T · [σ ij ] · T T (1.6)⎡ ⎤i 1 l 1 m 1T = ⎣i 2 l 2 m 2⎦ (1.7)i 3 l 3 m 3la matrice T contiene per righe i coseni <strong>di</strong>rettori degli assi X ′ − Y ′ − Z ′ rispetto<strong>al</strong>la terna X − Y − Z. Quin<strong>di</strong> il tensore <strong>di</strong> sforzo può essere trattato come unamatrice (1.3), collegata a una legge <strong>di</strong> trasformazione (1.6).1.2.1 Trasformazione riferimento per sforzo pianoLa matrice T nel caso <strong>di</strong> trasformazione <strong>di</strong> uno stato <strong>di</strong> sforzo piano da unriferimento X − Y ad un riferimento X ′ − Y ′ assume la seguente espressione:[ ]cos θ sin θT =(1.8)− sin θ cos θe la Eq.1.6 restituisce le espressioni:⎧⎪⎨σ x ′ = σ x cos 2 θ + σ y sin 2 θ + 2σ xy cos θ sin θσ y ′ = σ x sin 2 θ + σ y cos 2 θ − 2σ xy cos θ sin θ⎪⎩σ x ′ y ′ = −(σ x − σ y ) cos θ sin θ + σ xy (cos 2 θ − sin 2 θ)E’ possibile riscrivere queste equazioni in funzione <strong>di</strong> 2θ come:⎧σ x ′ = 1 2 ⎪⎨(σ x + σ y ) + 1 2 (σ x − σ y ) cos 2θ + τ xy sin 2θσ y ′ = 1 2 (σ x + σ y ) − 1 2 (σ x − σ y ) cos 2θ − τ xy sin 2θ(1.9)(1.<strong>10</strong>)⎪⎩τ x ′ y ′= −1 2 (σ x − σ y ) sin 2θ + τ xy cos 2θ8
Y'YX'θXFigura 1.3: Cambio <strong>del</strong> sistema <strong>di</strong> riferimento in un piano.1.3 Sforzi princip<strong>al</strong>iCon <strong>di</strong>rezioni princip<strong>al</strong>i si intendono le <strong>di</strong>rezioni norm<strong>al</strong>i a quei piani in cuila componente <strong>di</strong> sforzo è rappresentata solo da uno sforzo norm<strong>al</strong>e σ p (dettosforzo princip<strong>al</strong>e). Se esiste un t<strong>al</strong>e piano <strong>al</strong>lora le componenti <strong>del</strong> vettore −→ Srisultano:⎡ ⎤ ⎡ ⎤S−→ x σ p · iS = ⎣S y⎦ = ⎣ σ p · l ⎦S z σ p · mDovendo v<strong>al</strong>ere la Eq.(1.4), risulta che gli sforzi princip<strong>al</strong>i sono quei v<strong>al</strong>ori <strong>di</strong> σ pche sod<strong>di</strong>sfano:(σ xx − σ p ) σ xy σ xzσ xy (σ yy − σ p ) σ yz∣ σ xz σ yz (σ zz − σ p ) ∣ = 0 (1.11)Risolvendo il determinante si ottiene un’equazione cubica le cui ra<strong>di</strong>ci sono glisforzi princip<strong>al</strong>i σ p :σ 3 p − I 1 σ 2 p + I 2 σ p − I 3 = 0 (1.12)dove le quantità:⎧I ⎪⎨ 1 = σ x + σ y + σ zI 2 = σ x σ y + σ x σ z + σ y σ z − σxy 2 − σxz 2 − σyz2 ⎪⎩I 3 = σ x σ y σ z + 2σ xy σ xz σ yz − σ x σyz 2 − σ y σxz 2 − σ z σxy2(1.13)T<strong>al</strong>e equazione risolta ammette 3 ra<strong>di</strong>ci σ 1 , σ 2 e σ 3 che vengono detti gli sforziprincip<strong>al</strong>i. Gli sforzi princip<strong>al</strong>i sono gli autov<strong>al</strong>ori <strong>del</strong>la matrice [σ ij ].Introducendo le soluzioni σ 1 , σ 2 e σ 2 nel sistema (considerando inoltre larelazione i 2 + l 2 + m 2 = 1) si ricavano tre terne <strong>di</strong> coseni <strong>di</strong>rettori (i, l, m) chedefiniscono le <strong>di</strong>rezioni princip<strong>al</strong>i (o con <strong>al</strong>tra terminologia gli autovettori <strong>del</strong>lamatrice).Rifacendosi <strong>al</strong>le proprietà degli autov<strong>al</strong>ori ed autovettori si possono enunciarele seguenti regole:9
• se i 3 sforzi princip<strong>al</strong>i sono <strong>di</strong>stinti, <strong>al</strong>lora le 3 <strong>di</strong>rezioni princip<strong>al</strong>i sono<strong>di</strong>stinte ed ortogon<strong>al</strong>i;• se 2 v<strong>al</strong>ori <strong>di</strong> σ p coincidono <strong>al</strong>lora una sola <strong>di</strong>rezione princip<strong>al</strong>e è definita(corrisponde <strong>al</strong>lo sforzo princip<strong>al</strong>e <strong>di</strong>verso dagli <strong>al</strong>tri due) mentre le <strong>al</strong>tresono infinite perché corrispondono <strong>al</strong>le norm<strong>al</strong>i <strong>al</strong>la prima;• se i 3 v<strong>al</strong>ori <strong>di</strong> σ p coincidono <strong>al</strong>lora ogni <strong>di</strong>rezione è princip<strong>al</strong>e (sforzoidrostatico: la pressione è identica su qu<strong>al</strong>siasi superficie).Le tre ra<strong>di</strong>ci σ 1 , σ 2 , σ 3 (or<strong>di</strong>nate in modo che σ 1 > σ 2 > σ 3 ) hanno un importantesignificato: σ 1 è il massimo v<strong>al</strong>ore <strong>del</strong>lo sforzo norm<strong>al</strong>e in un punto (<strong>al</strong>variare <strong>del</strong>la giacitura <strong>del</strong> piano), mentre σ 3 è lo sforzo norm<strong>al</strong>e minimo.I termini I 1 , I 2 ed I 3 <strong>del</strong>l’eq. 1.13 sono dette invarianti perchè non variano <strong>al</strong>variare <strong>del</strong>l’orientamento <strong>del</strong> sistema <strong>di</strong> riferimento. In particolare, se riferiti<strong>al</strong>le <strong>di</strong>rezioni princip<strong>al</strong>i, assumono il v<strong>al</strong>ore:⎧⎪⎨ I 1 = σ 1 + σ 2 + σ 3I 2 = σ 1 σ 2 + σ I σ 3 + σ 2 σ 3(1.14)⎪⎩I 3 = σ 1 σ 2 σ 3Esempio 1.1 Si consideri lo stato <strong>di</strong> sforzo rappresentato in Fig. 1.4: c<strong>al</strong>colare glisforzi e le <strong>di</strong>rezioni princip<strong>al</strong>i (i v<strong>al</strong>ori sono espressi in [MPa]).Figura 1.4: C<strong>al</strong>colo degli sforzi princip<strong>al</strong>i tramite Eq. (1.12).Scrivendo il tensore <strong>del</strong>lo stato <strong>di</strong> sforzo:⎡0 0⎤<strong>10</strong>0[σ ij] = ⎣ 0 0 <strong>10</strong>0⎦<strong>10</strong>0 <strong>10</strong>0 0C<strong>al</strong>colando gli invarianti si ricava:I 1 = 0 I 2 = −2 · <strong>10</strong>0 2 I 3 = 0Introducendo nella (1.12) i v<strong>al</strong>ori ricavati si ottengono gli sforzi princip<strong>al</strong>i (i v<strong>al</strong>ori sonoespressi in [MPa]):σ I = <strong>10</strong>0 √ 2 σ II = 0 σ III = −<strong>10</strong>0 √ 2<strong>10</strong>
Le <strong>di</strong>rezioni princip<strong>al</strong>i risultano espresse d<strong>al</strong>le colonne <strong>del</strong>la matrice V, che si c<strong>al</strong>colain modo semplice con tecniche <strong>di</strong> c<strong>al</strong>colo numerico:⎡ √ ⎤0.5 20.52⎢[V ] = ⎣0.5 − √ 2 ⎥0.5√ 2⎦20 − √ 22 2Esempio 1.2 C<strong>al</strong>colare gli sforzi princip<strong>al</strong>i e le <strong>di</strong>rezioni princip<strong>al</strong>i se <strong>al</strong>lo stato <strong>di</strong>sforzo <strong>del</strong>l’esempio precedente viene sovrapposto idrostatico pari a <strong>10</strong>0 MPa.In t<strong>al</strong> caso il tensore degli sforzi assume la forma:⎡<strong>10</strong>0 0⎤<strong>10</strong>0[σ ij] = ⎣ 0 <strong>10</strong>0 <strong>10</strong>0⎦<strong>10</strong>0 <strong>10</strong>0 <strong>10</strong>0Si verifica imme<strong>di</strong>atamente come I 1 = 300, ovvero l’invariante primo è la somma degliinvarianti I 1 dei due stati <strong>di</strong> sforzo sovrapposti. Risolvendo completamente si ottiene:σ I = <strong>10</strong>0( √ 2 + 1) σ II = <strong>10</strong>0 σ III = <strong>10</strong>0(1 − √ 2)Si può anche verificare come gli autovettori risultino ancora:⎡ √ ⎤0.5 20.52⎢[V ] = ⎣0.5 − √ 2 ⎥0.5√ 2⎦20 − √ 22 2ovvero la sovrapposizione <strong>di</strong> uno sforzo idrostatico su uno stato <strong>di</strong> sforzo generico [σ ij]non <strong>al</strong>tera le <strong>di</strong>rezioni princip<strong>al</strong>i.1.3.1 Sforzi princip<strong>al</strong>i nello stato <strong>di</strong> sforzo pianoSi consideri uno stato <strong>di</strong> sforzo piano in cui σ z = 0 (rilasseremo questa ipotesinell’esempio): c<strong>al</strong>coliamo d<strong>al</strong>la 1.9 i v<strong>al</strong>ori massimi e minimi <strong>di</strong> σ x ′. Cercandoquei v<strong>al</strong>ori <strong>di</strong> θ per cui:si ottiene:∂σ x ′∂θ = −(σ x − σ y ) sin 2θ + 2τ xy cos 2θ = 0 (1.15)tan 2θ p =2τ xyσ x − σ y(1.16)Essendo tan 2θ = tan(π + 2θ) la (1.16) identifica due angoli θ p tra loro perpen<strong>di</strong>colariche sono le <strong>di</strong>rezioni princip<strong>al</strong>i nel piano. Va annotato come la(1.15) corrisponda anche <strong>al</strong>la con<strong>di</strong>zione τ x′ y ′ = 0, ovvero le <strong>di</strong>rezioni princip<strong>al</strong>icorrispondono a piani su cui lo sforzo <strong>di</strong> scorrimento è nullo.11
Introducendo gli angoli θ p nella prima <strong>del</strong>le (1.<strong>10</strong>) si ottengono i v<strong>al</strong>orimassimo e minimo <strong>di</strong> σ x ′:σ 1,2 = σ x + σ y2√ (σx ) 2− σ y±+ τxy 22 (1.17)Alla equazione precedente si può anche arrivare (come in [4]) attraverso l’annullamento<strong>del</strong> determinante <strong>del</strong>la (1.11). In particolare per uno stato <strong>di</strong> sforzopiano gli sforzi princip<strong>al</strong>i sono le soluzioni <strong>di</strong>:∣ (σ xx − σ p ) σ xyσ xy (σ yy − σ p ) ∣ = 0 (1.18)risolvendo t<strong>al</strong>e equazione si ottiene ancora la (1.17) per esprimere gli sforziprincip<strong>al</strong>i.Esempio 1.3 Si consideri la porzione <strong>di</strong> un <strong>al</strong>bero <strong>del</strong> <strong>di</strong>ametro <strong>di</strong> 30 mm soggettoad una coppia M t = 250 [Nm] ed <strong>al</strong>la pressione p = <strong>10</strong> [MP a], c<strong>al</strong>colare gli sforziprincip<strong>al</strong>i e le <strong>di</strong>rezioni princip<strong>al</strong>i.XYZPp-p-pMt(a)(b)(c)Figura 1.5: Albero soggetto ad un momento torcente ed una pressione esterna:a-b) sollecitazioni; c) stato <strong>di</strong> sforzo dovuto <strong>al</strong>la pressione esterna.Gli sforzi agenti sulla sezione (espressi in [MPa]) sono uno sforzo <strong>di</strong> scorrimento:τ = 16Mtπ · d 3 = 47.2ed uno stato <strong>di</strong> sforzo piano (Fig. 1.5 (c)) dovuto <strong>al</strong>la pressione esterna. Rappresentandoil tensore degli sforzi:⎡−<strong>10</strong> −47.2 0⎤[σ ij] = ⎣−47.2 0 0 ⎦0 0 −<strong>10</strong>A rigore si tratta <strong>di</strong> uno stato <strong>di</strong> sforzo tri<strong>di</strong>mension<strong>al</strong>e, ma poichè la <strong>di</strong>rezione zè una <strong>di</strong>rezione princip<strong>al</strong>e, possiamo eliminare d<strong>al</strong> tensore una riga ed una colonna12
ottenendo 3 :[σ ij] =[ −<strong>10</strong>] −47.2−47.2 0Gli sforzi princip<strong>al</strong>i risultano (tendendo conto che conosciamo già σ z = −<strong>10</strong>):σ 1 = 42.46 σ 2 = −<strong>10</strong> σ 3 = −52.46D<strong>al</strong>la (1.16) si ottiene (considerando solo la prima <strong>di</strong>rezione):θ p = 0.6806La matrice <strong>di</strong> rotazione T <strong>del</strong>la (1.8), riferita <strong>al</strong>lo stato <strong>di</strong> sforzo tri<strong>di</strong>mension<strong>al</strong>e, cheesprime lo stato <strong>di</strong> sforzo nelle <strong>di</strong>rezioni princip<strong>al</strong>i risulta:⎡cos θ p sin θ p⎤0T = ⎣− sin θ p cos θ p 0⎦ (1.19)0 0 1Tramite la (1.16), tenedendo conto <strong>di</strong> questo esempio, è anche facile verificareche, sovrapponendo uno stato <strong>di</strong> sforzo idrostatico ad uno stato <strong>di</strong> sforzo piano,le <strong>di</strong>rezioni princip<strong>al</strong>i non cambiano.1.4 Riferimento princip<strong>al</strong>eNel riferimento princip<strong>al</strong>e (ovvero nella terna identificata d<strong>al</strong>le <strong>di</strong>rezioni princip<strong>al</strong>i)il tensore [σ ij ] assume la forma <strong>di</strong>agon<strong>al</strong>e:⎡⎤σ 1 0 0[σ ij ] = ⎣ 0 σ 2 0 ⎦ (1.20)0 0 σ 3ovvero non vi è nessuno sforzo <strong>di</strong> taglio (ve<strong>di</strong> Fig. 1.6). Considereremo t<strong>al</strong>eriferimento per c<strong>al</strong>colare in modo semplice <strong>al</strong>cune importanti proprietà <strong>del</strong>lostato <strong>di</strong> sforzo in un punto.Figura 1.6: Trasformazione <strong>del</strong> tensore <strong>di</strong> sforzo nel riferimento princip<strong>al</strong>e [3].3 possiamo anche immaginare <strong>di</strong> guardare il tensore d<strong>al</strong>l’asse z riguardando lo stato <strong>di</strong>sforzo come piano.13
1.4.1 Sforzi norm<strong>al</strong>i e tangenzi<strong>al</strong>i su un piano genericoRiferendosi <strong>al</strong>la terna <strong>del</strong>le <strong>di</strong>rezioni princip<strong>al</strong>i, le componenti <strong>del</strong> vettore −→ S (suun piano la cui norm<strong>al</strong>e è identificata da −→ n = [i l m] T ) si c<strong>al</strong>colano d<strong>al</strong>la (1.4) erisultano:S x = σ 1 i S y = σ 2 l S z = σ 3 m (1.21)Lo sforzo norm<strong>al</strong>e sul piano (d<strong>al</strong>la 1.5) risulta:σ n = −→ S × −→ n = σ 1 i 2 + σ 2 l 2 + σ 3 m 2 (1.22)Il v<strong>al</strong>ore <strong>del</strong>lo sforzo <strong>di</strong> taglio sul piano si c<strong>al</strong>cola come:τ 2 = S 2 − σ 2 n = σ 2 1i 2 + σ 2 2l 2 + σ 2 3m 2 − (σ 1 i 2 + σ 2 l 2 + σ 3 m 2 ) 2 (1.23)da cui [2] si ottiene:τ = [ (σ 1 − σ 2 ) 2 i 2 l 2 + (σ 2 − σ 3 ) 2 l 2 m 2 + (σ 1 − σ 3 ) 2 i 2 m 2] 1/2(1.24)Esaminando la (1.22) è facile verificare che (con la convenzione σ 1 > σ 2 > σ 3 ),il v<strong>al</strong>ore massimo <strong>di</strong> σ n è σ 1 e si raggiunge per [i = 1, l = m = 0], mentreil minimo è σ 3 e si raggiunge per [i = l = 0, m = 1]: ciò conferma che σ 1 eσ 3 rappresentano il massimo ed il minimo sforzo norm<strong>al</strong>e in un dato punto, <strong>al</strong>variare <strong>del</strong>la giacitura <strong>del</strong> piano.Considerando invece τ, il massimo si raggiunge sui piani per cui i 2 = m 2 = 1/2ed l 2 = 0 (i = m = ± √ 2/2 ed l = 0): queste giaciture identificano due pianipar<strong>al</strong>leli <strong>al</strong>la <strong>di</strong>rezione 2 ed inclinati <strong>di</strong> 45 gra<strong>di</strong> rispetto <strong>al</strong>le <strong>di</strong>rezioni 1 e 3 4 . Suquesti piani il massimo sforzo tangenzi<strong>al</strong>e v<strong>al</strong>e:mentre lo sforzo σ n v<strong>al</strong>e:τ max = ± (σ 1 − σ 3 )2σ n = σ 1 + σ 32(1.25)(1.26)33112Figura 1.7: Piani corrispondenti a τ max .4 le 4 giaciture corrispondono <strong>al</strong>le due <strong>di</strong>rezioni <strong>del</strong>la norm<strong>al</strong>e per ognuno dei piani.14
1.4.2 Cerchi <strong>di</strong> MohrConsideriamo un piano avente la giacitura par<strong>al</strong>lela <strong>al</strong>la <strong>di</strong>rezione 3 (ovvero lanorm<strong>al</strong>e <strong>al</strong> piano è perpen<strong>di</strong>colare <strong>al</strong>l’asse 3 ed m = 0).32σ τ 2 n σ nσ 1τ nσ nσ 1θn1(a)2(b)σ 2Figura 1.8: <strong>Costruzione</strong> <strong>del</strong> cerchio <strong>di</strong> Mohr per piani par<strong>al</strong>leli <strong>al</strong>la <strong>di</strong>rezione 3: a)identificazione <strong>del</strong>lo stato <strong>di</strong> sforzo agente; b) convenzioni <strong>di</strong> segno.Detto θ l’angolo che la norm<strong>al</strong>e forma con l’asse 1 e fissando come positiva la<strong>di</strong>rezione oraria <strong>del</strong>lo sforzo <strong>di</strong> scorrimento sulla faccia <strong>di</strong> norm<strong>al</strong>e n, possiamoscrivere d<strong>al</strong>le (1.<strong>10</strong>) 5 :⎧⎪⎨ σ n = 1 2 (σ 1 + σ 2 ) + 1 2 (σ 1 − σ 2 ) cos 2θ⎪⎩ τ n = 1 (1.27)2 (σ 1 − σ 2 ) sin 2θda cui è facile verificare che:[σ n − 1 2 [ ] 2 12 (σ 1 + σ 2 )]+ τn 2 =2 (σ 1 − σ 2 )(1.28)Questa equazione rappresenta, in un piano σ − τ detto piano <strong>di</strong> Mohr, unacirconferenza <strong>di</strong> centro C e raggio R con:( )(σ1 + σ 2 )C, 0 , R = (σ 1 − σ 2 )22ovvero i punti P (σ n , τ n ), per i piani con m = 0, descrivono <strong>al</strong> variare <strong>di</strong> θ unacirconferenza <strong>di</strong> centro C e raggio R, che passa per gli sforzi princip<strong>al</strong>i σ 1 e σ 2 .La costruzione grafica <strong>del</strong> cerchio <strong>di</strong> Mohr permette <strong>di</strong> visu<strong>al</strong>izzare in modosemplice lo stato <strong>di</strong> sforzo e <strong>di</strong> c<strong>al</strong>colare graficamente gli sforzi princip<strong>al</strong>i (nonsi usa più ovviamente per questo motivo, ma aiuta a visu<strong>al</strong>izzare la soluzione).Ripetendo la costruzione per i piani par<strong>al</strong>leli agli assi 1 e 3 si ottengono<strong>al</strong>tre due circonferenze: in tot<strong>al</strong>e i 3 cerchi <strong>di</strong> Mohr permettono <strong>di</strong> visu<strong>al</strong>izzarein modo semplice i v<strong>al</strong>ori massimi e minimi <strong>del</strong>lo stato <strong>di</strong> sforzo nel punto. Sipuò <strong>di</strong>mostare che lo stato <strong>di</strong> sforzo su una giacitura generica (non par<strong>al</strong>lela adun asse princip<strong>al</strong>e) appartiene <strong>al</strong>la regione compresa tra il cerchio fondament<strong>al</strong>e(quello passante per σ 1 e σ 3 ) e gli <strong>al</strong>tri due.5 rispetto <strong>al</strong>le (1.<strong>10</strong>) dobbiamo considerare σ x ′ e τ x ′ y ′ cambiando <strong>di</strong> segno a quest’ultima15
σ σ σ 2 13 σ 2σ 1(a)(b)Figura 1.9: Cerchi <strong>di</strong> Mohr per lo stato <strong>di</strong> sforzo: a) il cerchio rappresentante inpiani con m = 0; b) i tre cerchi che descrivono lo stato <strong>di</strong> sforzo nel punto <strong>al</strong> variare<strong>del</strong>la giacitura <strong>del</strong> piano considerato.1.4.3 Stato <strong>di</strong> sforzo su piani ottaedr<strong>al</strong>iSi <strong>di</strong>cono piani ottaedr<strong>al</strong>i quei piani che hanno una inclinazione ugu<strong>al</strong>e rispettoa tutti gli assi princip<strong>al</strong>i, in particolare (il nome ottaedr<strong>al</strong>i deriva d<strong>al</strong>la figurageometrica identificata da t<strong>al</strong>i piani) questi piani hanno coseni <strong>di</strong>rettori:i 2 = l 2 = m 2 = 1 3Introducendo t<strong>al</strong>i v<strong>al</strong>ori nella (1.22) si ottiene:σ ott = σ 1 + σ 2 + σ 33= I 13(1.29)che viene anche chiamato sforzo idrostatico ed in<strong>di</strong>cato con il simbolo σ h . Losforzo tangenzi<strong>al</strong>e sui piani ottaedr<strong>al</strong>i v<strong>al</strong>e:τ ott = 1 [(σ1 − σ 2 ) 2 + (σ 2 − σ 3 ) 2 + (σ 1 − σ 3 ) 2 ) ] 1/23(1.30)Figura 1.<strong>10</strong>: Piani ottaedr<strong>al</strong>i16
Lo sforzo τ ott può essere riscritto, svolgendo i quadrati, come:√ √ 2τ ott = σ1 2 3+ σ2 2 + σ2 3 − σ 1σ 2 − σ 1 σ 3 − σ 2 σ 3 (1.31)La τ ott , impiegata come vedremo nei capitoli successivi per le verifiche <strong>di</strong> resistenza,può anche essere scritta come:τ ott = 1 3[2I21 − 6 · I 2] 1/2(1.32)che può quin<strong>di</strong> utilmente permettere, sostituendo i v<strong>al</strong>ori degli invarianti, <strong>di</strong>scrivere τ ott in termini <strong>del</strong>le componenti <strong>del</strong> tensore in coor<strong>di</strong>nate cartesiane:τ ott = 1 3[(σx − σ y ) 2 + (σ y − σ z ) 2 + (σ x − σ z ) 2 + 6τ 2 xy + 6τ 2 yz + 6τ 2 xz] 1/2(1.33)1.4.4 Componente <strong>di</strong> sforzo idrostatica e deviatoricaÉ utile considerare un generico stato <strong>di</strong> sforzo σ ij come sovrapposizione <strong>di</strong> unostato <strong>di</strong> sforzo idrostatico e <strong>di</strong> uno deviatorico. In particolare, detto σ h :σ h = σ ott = σ 1 + σ 2 + σ 33= σ x + σ y + σ z3il generico stato <strong>di</strong> sforzo [σ ij ] può essere scritto come:dove:e:σ ij = h ij + s ij (1.34)⎡⎤σ h 0 0h ij = ⎣ 0 σ h 0 ⎦ (1.35)0 0 σ h⎡⎤σ x − σ h σ xy σ xzs ij = ⎣ σ xy σ y − σ h σ yz⎦ (1.36)σ xz σ yz σ z − σ hGli sforzi princip<strong>al</strong>i <strong>del</strong> tensore s ij risultano:s I = σ I − σ h s II = σ II − σ h s III = σ III − σ h (1.37)Gli invarianti <strong>del</strong> tensore [s ij ] vengono in<strong>di</strong>cati con J 1 , J 2 e J 3 . Si può ancheesprimere τ ott come:τ ott =√23 J 2 (1.38)17
1.5 Equazioni indefinite <strong>di</strong> equilibrioConsideriamo un piccolo volume <strong>di</strong> materi<strong>al</strong>e avente <strong>di</strong>mensioni dx × dy × dz 6ed immaginiamo siano presenti, oltre <strong>al</strong>le componenti <strong>del</strong> tensore <strong>di</strong> sforzo, lecomponenti <strong>di</strong> forza <strong>di</strong> volume F x − F y − F z . Se esprimiamo l’equilibrio <strong>del</strong>volumetto in <strong>di</strong>rezione x (Fig.1.12) otteniamo la relazione:∂σ x∂x + ∂σ yx∂y+ ∂σ zx∂z + F x = 0Gener<strong>al</strong>izzando nelle tre <strong>di</strong>rezioni si ottengono le equazioni <strong>di</strong> equilibrio:zσ zx + ∂σ zx∂z dzσ xσ x + ∂σ x∂x dxxσ yxdyσ zxdxdzσ yx + ∂σ yx∂y dxyFigura 1.11: Equilibrio <strong>di</strong> un volumetto in <strong>di</strong>rezione x⎧∂σ x∂x + ∂σ xy∂y⎪⎨∂σ xy∂x⎪⎩∂σ xz∂x+ ∂σ zx∂z + F x = 0+ ∂σ y∂y + ∂σ yz∂z + F y = 0+ ∂σ yz∂y+ ∂σ z∂z + F z = 0(1.39)Queste equazioni esprimono come varia lo stato <strong>di</strong> sforzo <strong>al</strong>l’interno <strong>del</strong> corpoper effetto <strong>del</strong>le forze <strong>di</strong> volume presenti. Il set <strong>di</strong> equazioni precedenti puòessere scritto in forma sintetica come [3]:∇σ + F = 0 (1.40)1.5.1 Riferimento cilindricoIn coor<strong>di</strong>nate cilindriche lo stato <strong>di</strong> sforzo risulta espresso da:⎡⎤σ r τ rθ τ rz[σ ij ] = ⎣τ rθ σ θ τ θz⎦ (1.41)τ rz τ θz σ z6 volumetto infinitesimo, ma non nullo.18
Esprimendo la (1.40) nel sistema <strong>di</strong> coor<strong>di</strong>nate cilindriche [3] si ottiene:⎧∂σ r∂r ⎪⎨+ 1 ∂τ rθr ∂θ+ ∂τ rz∂z + 1 r (σ r − σ θ ) + F r = 0∂τ rθ∂r+ 1 ∂σ θr ∂θ + ∂τ θz∂z + 2 r τ rθ + F θ = 0⎪⎩ ∂τ rz∂r+ 1 ∂τ θzr ∂θ+ ∂σ z∂z + 1 r τ rz + F z = 0(1.42)zyxFigura 1.12: Sforzi in un riferimento cilindrico1.5.2 Riferimento sfericoIn coor<strong>di</strong>nate cilindriche lo stato <strong>di</strong> sforzo risulta espresso da:⎡⎤σ r τ rφ τ rθ[σ ij ] = ⎣τ rφ σ φ τ φθ⎦ (1.43)τ rθ τ φθ σ θEsprimendo la (1.40) nel sistema <strong>di</strong> coor<strong>di</strong>nate sferiche [3] si ottiene:⎧∂σ r∂r + 1 ∂τ rφr ∂θ + 1 ∂τ rθr sin φ ∂θ + 1 r (2σ r − σ φ − σ θ + τ rφ cot φ) + F r = 0⎪⎨∂τ rφ∂r+ 1 ∂σ φr ∂φ + 1 ∂τ φθr sin φ ∂θ + 1 r [(σ φ − σ θ ) cot φ + 3τ rφ ] + F φ = 0⎪⎩∂τ rθ∂r+ 1 ∂τ φθr ∂φ + 1 ∂σ θr sin φ ∂θ + 1 r (2τ φθ cot φ + 3τ rθ ) + F θ = 0(1.44)19
zyxFigura 1.13: Sforzi in un riferimento sferico1.6 EserciziEsercizio 1.1 Si consideri un tubo (D e=36 mm, D i=30 mm) soggetto ad un momentoMt=450 Nm ed una forza F=30 kN. C<strong>al</strong>colare:• lo stato <strong>di</strong> sforzo su un punto <strong>del</strong>la superficie esterna <strong>del</strong> tubo considerando ilriferimento x − y − z <strong>di</strong> figura (x <strong>di</strong>rezione ra<strong>di</strong><strong>al</strong>e ed y circonferenzi<strong>al</strong>e);• lo stato <strong>di</strong> sforzo su un piano inclinato <strong>di</strong> 45 gra<strong>di</strong> rispetto agli assi y e z;• v<strong>al</strong>utare l’effetto <strong>del</strong>l’introduzione <strong>di</strong> una pressione interna <strong>di</strong> <strong>10</strong> MPa sullo stato<strong>di</strong> sforzo c<strong>al</strong>colato ai punti precedenti.FMtzzxyyFigura 1.14: Schema <strong>di</strong> un tubo soggetto ad una forza assi<strong>al</strong>e e <strong>del</strong> piano su cuic<strong>al</strong>colare lo stato <strong>di</strong> sforzo.20
Esercizio 1.2 C<strong>al</strong>colare gli sforzi princip<strong>al</strong>i nell’esercizio precedente e verificare, attraversoil c<strong>al</strong>colo degli sforzi princip<strong>al</strong>i <strong>di</strong> s ij le (1.37). Le <strong>di</strong>rezioni princip<strong>al</strong>i coincidonocon quelle <strong>di</strong> σ ij ?Esercizio 1.3 Considerando un <strong>al</strong>bero <strong>del</strong> <strong>di</strong>ametro d=18 mm soggetto ad una coppiatorcente <strong>di</strong> 50Nm ed un momento flettente pari a 60 Nm:• ricavare lo stato <strong>di</strong> sforzo nel punto P;• c<strong>al</strong>colare gli sforzi princip<strong>al</strong>i e da questi ricavare τ max;• c<strong>al</strong>colare τ ott.ZPXYM fM tFigura 1.15: Schema <strong>di</strong> un <strong>al</strong>bero soggetto ad un momento flettente ed unmomento torcente.21
Capitolo 2Deformazioni e legamesforzi-deformazioniSi richiamano qui i concetti fondament<strong>al</strong>i <strong>del</strong>lo stato <strong>di</strong> deformazione nei soli<strong>di</strong>, evidenziandole <strong>di</strong>verse componenti <strong>del</strong> tensore <strong>di</strong> deformazione. Si espongono quin<strong>di</strong> i <strong>di</strong>versitipi <strong>di</strong> legame sforzi-deformazioni che verranno utilizzati nel <strong>corso</strong> 1 .2.1 Spostamenti e piccole deformazioniConsideriamo un solido, <strong>di</strong> cui la posizione dei <strong>di</strong>versi punti materi<strong>al</strong>i (con cuipossiamo pensare <strong>di</strong> schematizzare le particelle elementari) in un dato istante tidentifica la configurazione <strong>del</strong>l’elemento considerato.Identifichiamo un punto materi<strong>al</strong>e con le coor<strong>di</strong>nate (x, y, z) <strong>del</strong>la posizione<strong>al</strong>l’istante <strong>di</strong> tempo t 0 ed immaginiamo che ad un <strong>di</strong>verso istante t, il solido sitrovi in una <strong>di</strong>versa configurazione con i <strong>di</strong>versi punti che hanno subito deglispostamenti u(x, y, z, t) in <strong>di</strong>rezione x, v(x, y, z, t) in <strong>di</strong>rezione y e w(x, y, z, t)in <strong>di</strong>rezione z. Il solido si trova in una configurazione deformata.Dato il campo <strong>di</strong> spostamenti nel solido possiamo c<strong>al</strong>colare il corrispondentecampo <strong>di</strong> deformazioni, nell’ipotesi <strong>di</strong> piccoli spostamenti. In particolare consideriamo<strong>al</strong>l’istante t tre punti A-B-C che formino tra <strong>di</strong> loro un angolo <strong>di</strong> π/2<strong>del</strong>imitato dai segmenti AB e AC <strong>di</strong> lunghezza inizi<strong>al</strong>e rispettivamente dx e dy(Fig.2.1). Se consideriamo il segmento AB, possiamo c<strong>al</strong>colare la deformazionelungo l’asse x come:ɛ x = ∆l u(x + dx, y, z, t) − u(x, y, z, t)= (2.1)ldxNella configurazione deformata la linea AC ruota attorno <strong>al</strong>l’asse z <strong>di</strong> un angolo:1 a cura <strong>di</strong> S. Beretta e S. Folettiu(x, y + dy, z, t) − u(x, y, z, t)dy= ∂udy(2.2)22
u(x,y+dy,z,t)CdyAu(x,y,z,t)dxu(x+dx,y,z,t)BFigura 2.1: Spostamento u dei punti A,B e C <strong>al</strong>l’istante t.Similmente, la rotazione <strong>del</strong> segmento AB attorno <strong>al</strong>l’asse z risulta:v(x + dx, y, z, t) − v(x, y, z, t)dxLo scorrimento γ xy nel piano xy risulta pari a:= ∂vdx(2.3)γ xy = ∂u∂y + ∂v∂x . (2.4)Per un solido 3D nello spazio lo stato <strong>di</strong> deformazione è descritto da un tot<strong>al</strong>e<strong>di</strong> sei componenti:ɛ x = ∂u∂x ,γ xy = ∂u∂y + ∂v∂x ,ɛ y = ∂v∂y ,ɛ z = ∂w∂zγ yz = ∂v∂z + ∂w∂y ,γ xz = ∂u∂z + ∂w∂x(2.5)Le Eq. (2.5), scrivendo γ xy = 2ɛ xy , possono essere rimpiazzate d<strong>al</strong>la notazionesintetica 2 :ɛ ij = 1 ( ∂ui+ ∂u )j(2.6)2 ∂x i ∂x jPoichè γ xy è l’angolo <strong>di</strong> cui si <strong>di</strong>storce l’angoloγ xy = γ yx e quin<strong>di</strong> ɛ ij = ɛ ji .ˆ ABC, si deve dunque essereEsempio 2.1 Si consideri in un sistema <strong>di</strong> riferimento polare una porzione <strong>di</strong> materi<strong>al</strong>eABCD sottesa d<strong>al</strong>l’angolo dθ: i punti abbiano coor<strong>di</strong>nate A(r, 0), B(r+dr, 0), C(r, dθ)e D(r + dr, dθ). Supponendo che il corpo si deformi con spostamenti solo ra<strong>di</strong><strong>al</strong>i (t<strong>al</strong>etipo <strong>di</strong> problema si <strong>di</strong>ce assi<strong>al</strong>simmetrico), c<strong>al</strong>colare le componenti <strong>di</strong> deformazione.2 v<strong>al</strong>e la notazione: ɛ ii = ɛ i .23
DD'CC'dθA A' B B'Figura 2.2: Deformazione nei problemi assi<strong>al</strong>simmetriciLe componenti <strong>di</strong> deformazione si c<strong>al</strong>colano facilmente con la Eq.(2.1). In particolaredetto u lo spostamento ra<strong>di</strong><strong>al</strong>e dei punti A e C e u+du lo spostamento dei punti B e D(lo spostamento <strong>di</strong>pende solo d<strong>al</strong>la coor<strong>di</strong>nata r), possiamo c<strong>al</strong>colare le deformazionicome:ɛ r = A′ B ′ − ABABɛ θ = A′ C ′ − ACAC==[(r + dr + u + du) − (r + u)] − drdr[(r + u)dθ] − rdθ= u rdθ r= dudr(2.7)T<strong>al</strong>i relazioni, cui si può arrivare anche semplificando le (2.86) per tener conto <strong>del</strong>l’assi<strong>al</strong>simmetria,verranno impiegate nei capitoli successivi per la soluzione <strong>di</strong> <strong>al</strong>cuniproblemi assi<strong>al</strong>simmetrici (<strong>di</strong>schi e cilindri, lastre cilindriche).2.2 Tensore <strong>del</strong>le deformazioniStante la simmetria ɛ ij = ɛ ji , le deformazioni possono essere rappresentate d<strong>al</strong>tensore <strong>del</strong> secondo or<strong>di</strong>ne simmetrico:⎡⎤ɛ xx ɛ xy ɛ xz[ɛ ij ] = ⎣ɛ xy ɛ yy ɛ yz⎦ (2.8)ɛ xz ɛ yz ɛ zzConoscendo il tensore <strong>del</strong>le deformazioni in un riferimento (secondo una terna<strong>di</strong> <strong>di</strong>rezioni), le deformazioni ɛ ′ ij in una nuova terna X′ − Y ′ − Z ′ si ricavanoancora attraverso la matrice <strong>di</strong> trasformazione T con la relazione (simile <strong>al</strong>la1.6):[ɛ ′ ij] = T · [ɛ ij ] · T T (2.9)dove la matrice <strong>di</strong> trasformazione è già stata definita in (1.7).24
Per il tensore [ɛ ij ] v<strong>al</strong>gono le stesse proprietà <strong>del</strong> tensore degli sforzi, in particolareesiste una terna <strong>di</strong> <strong>di</strong>rezioni che identificano le <strong>di</strong>rezioni dei piani suiqu<strong>al</strong>i agiscono le deformazioni princip<strong>al</strong>i, ovvero i v<strong>al</strong>ori massimi e minimi cheassumono le deformazioni ɛ ii .La ricerca <strong>del</strong>le deformazioni princip<strong>al</strong>i ɛ 1 − ɛ 2 − ɛ 3 può essere effettuataricercando, con gli opportuni <strong>al</strong>goritmi, gli autov<strong>al</strong>ori <strong>del</strong>la matrice ɛ ij oppurericercando i v<strong>al</strong>ori ɛ p che sod<strong>di</strong>sfano la relazione:(ɛ xx − ɛ p ) ɛ xy ɛ xzɛ xy (ɛ yy − ɛ p ) ɛ yz∣ ɛ xz ɛ yz (ɛ zz − ɛ p ) ∣ = 0 (2.<strong>10</strong>)Risolvendo il determinante si ottiene un’equazione cubica le cui ra<strong>di</strong>ci sono ledeformazioni princip<strong>al</strong>i ɛ p :ɛ 3 p − E 1 ɛ 2 p + E 2 ɛ p − E 3 = 0 (2.11)dove le quantità:⎧E ⎪⎨ 1 = ɛ x + ɛ y + ɛ zE 2 = ɛ x ɛ y + ɛ x ɛ z + ɛ y ɛ z − ɛ 2 xy − ɛ 2 xz − ɛ 2 yz⎪⎩E 3 = ɛ x ɛ y ɛ z + 2ɛ xy ɛ xz ɛ yz − ɛ x ɛ 2 yz − ɛ y ɛ 2 xz − ɛ z ɛ 2 xy(2.12)dove E 1 − E 2 − E 3 sono chiamati invarianti <strong>del</strong>le deformazioni (come già vistoper gli sforzi, gli invarianti assumono espressioni molto semplici se espressi intermini <strong>del</strong>le deformazioni princip<strong>al</strong>i).Nel riferimento princip<strong>al</strong>e il tensore [ɛ ij ] assume la forma <strong>di</strong>agon<strong>al</strong>e:⎡ ⎤ɛ 1 0 0[ɛ ij ] = ⎣ 0 ɛ 2 0 ⎦0 0 ɛ 3ovvero non vi è nessuna deformazione <strong>al</strong> taglio: un par<strong>al</strong>lelepipedo orientatosecondo t<strong>al</strong>e riferimento si deformerebbe quin<strong>di</strong> mantenendo la propria formaortogon<strong>al</strong>e pur cambiando le lunghezze dei tre lati.2.2.1 Deformazione in una <strong>di</strong>rezione nei problemi pianiIn un problema bi-<strong>di</strong>mension<strong>al</strong>e, noto lo stato <strong>di</strong> deformazione in un riferimentoX − Y , lo stato <strong>di</strong> deformazione in un riferimento X ′ − Y ′ ruotato <strong>di</strong> un angoloθ si c<strong>al</strong>cola attraverso la matrice T espressa d<strong>al</strong>la (1.8). In particolare ladeformazione nella <strong>di</strong>rezione X ′ , formante un anglo θ con l’asse X (l’angolo simisura positivo in senso antiorario), risulta:ɛ X ′ = ɛ x cos 2 θ + ɛ y sin 2 θ + γ xy sin θ cos θ (2.13)T<strong>al</strong>e espressione viene utilizzata per an<strong>al</strong>izzare le misure estensimetriche neiproblemi piani. In particolare, nel caso in cui in cui non si conosca a priori la25
<strong>di</strong>rezione <strong>del</strong>le deformazioni princip<strong>al</strong>i, è necessario misurare le deformazioni intre <strong>di</strong>rezioni per ricavare tutte le componenti <strong>di</strong> [ɛ ij ] 3 .(a) (b) (c)Figura 2.3: Rilievo <strong>del</strong>le deformazioni in problemi paini: a) rosetta a 120 gra<strong>di</strong>; b)rosetta -45/0/45 gra<strong>di</strong>; c) schema gener<strong>al</strong>e <strong>di</strong> una rosetta.Speci<strong>al</strong>i combinazioni <strong>di</strong> estensimetri dette rosette estensimetriche sono <strong>di</strong>sponibiliper t<strong>al</strong>e tipo <strong>di</strong> misure e consistono in tre griglie estensimetriche comunemente<strong>di</strong>sposte con angoli <strong>di</strong> 120 gra<strong>di</strong> (<strong>di</strong>sposizione a Y) o 0 − 45 − 90gra<strong>di</strong>. Considerando una rosetta con griglie a − b − c caratterizzata dagli angoliθ a −θ b −θ c rispetto <strong>al</strong>l’asse X, le deformazioni per i tre sensori si scrivono come:⎧⎪⎨ɛ a = ɛ x cos 2 θ a + ɛ y sin 2 θ a + γ xy sin θ a cos θ aɛ b = ɛ x cos 2 θ b + ɛ y sin 2 θ b + γ xy sin θ b cos θ b (2.14)⎪⎩ɛ c = ɛ x cos 2 θ c + ɛ y sin 2 θ c + γ xy sin θ c cos θ cRisolvendo il sistema si ricavano le componenti <strong>di</strong> [ɛ ij ] e da queste si ricavanole deformazioni princip<strong>al</strong>i e l’angolo <strong>di</strong> cui ruotare il riferimento per ottenere ledeformazioni princip<strong>al</strong>i (vedasi esempio seguente).Esempio 2.2 Si consideri una rosetta estensimetrica con angoli θ a = 0 ◦ , θ b = 60 ◦ eθ c = 120 ◦ , che ha fornito la seguente lettura:ɛ a = 190µɛ ɛ b = 200µɛ ɛ c = −300µɛDeterminare lo stato <strong>di</strong> deformazione e le deformazioni princip<strong>al</strong>i.D<strong>al</strong>le Eq. (2.14) si ottiene:⎡ ⎤ ⎡ɛ a1 0 0⎣ɛ b⎦ ⎢ 1 3= ⎣ 4 4ɛ c14√343− √ 34 4⎤⎡⎥⎦ · ⎣⎤ɛ xɛ y⎦γ xySi ottiene:ɛ x = 190µɛ ɛ y = −130µɛ γ xy = 577µɛ3 infatti se non sono note le <strong>di</strong>rezioni princip<strong>al</strong>i, il problema ha tre incongnite (ɛ x, ɛ y, γ xy)ed è quin<strong>di</strong> natur<strong>al</strong>e che servano tre misure per determinarle.26
Per le deformazioni princip<strong>al</strong>i si può applicare una formula ugu<strong>al</strong>e <strong>al</strong>la (1.17), inparticolare:√ ( ) 2 ( ) 2ɛx + ɛy ɛx − ɛ y γxyɛ 1,2 = ±+(2.15)222ottenendo:ɛ 1 = 360µɛɛ 2 = −300µɛL’angolo tra la <strong>di</strong>rezione <strong>del</strong> riferimento princip<strong>al</strong>e e l’asse X si c<strong>al</strong>cola ancora con unaformula ugu<strong>al</strong>e <strong>al</strong>la (1.16):2θ p = tan −1 γ xy(2.16)ɛ x − ɛ yda cui si ottiene: θ p = 0.53232 (θ p = 30.5 ◦ ).2.2.2 Deformazione volumicaConsiderando un par<strong>al</strong>lelepipedo <strong>di</strong> materi<strong>al</strong>e avente volume V = A × B × C,con i lati par<strong>al</strong>leli agli assi x − y − z (Fig.2.4) le deformazioni risultano:la variazione <strong>del</strong> volume V risulta:ɛ x = dAdx , ɛ y = dBdy , ɛ z = dCdzdV = ∂V ∂V ∂VdA + dB + dC, (2.17)∂A ∂B ∂C<strong>di</strong>videndo per V otteniamo la deformazione volumica:dVV = ɛ V = dA A + dB B + dC C = ɛ x + ɛ y + ɛ z (2.18)zCC+dCBAA+dAyxB+dBFigura 2.4: C<strong>al</strong>colo deformazione volumica ɛ v27
2.3 Variazione <strong>del</strong>le deformazioni in un continuo- Equazioni <strong>di</strong> congruenzaIn Eq.2.5 si sono ricavate le relazioni tra deformazioni e spostamenti: date 3funzioni continue per gli spostamenti u - v - w è possibile ricavare le 6 componenti<strong>del</strong>le deformazioni. E’ semplice immaginare che, se integrassimo le ɛ ij perricavare gli spostamenti, le 6 componenti <strong>di</strong> deformazioni non possano esserein<strong>di</strong>pendenti e deve esistere una certa relazione tra le componenti <strong>di</strong> deformazione.Ricaveremo queste relazioni dapprima per il caso 2D e poi per il caso3D.Per capire meglio il concetto, prima <strong>di</strong> sviluppare le relazioni matematiche,consideriamo dapprima una semplice interpretazione geometrica [3] (vedasi Fig.2.5). Consideriamo un solido <strong>di</strong>scretizzato in elementi (a) nella configurazioneindeformata in (b). Consideriamo ora <strong>di</strong> assegnare agli elementi una deformazionee tentiamo <strong>di</strong> ricostruire il solido: in (c) gli elementi sono stati deformatiin modo da tener conto <strong>del</strong>la continuità con gli elementi vicini fornendo uncampo continuo <strong>di</strong> spostamenti, mentre in (d) gli elementi sono stati deformatiin<strong>di</strong>vidu<strong>al</strong>mente senza <strong>al</strong>cun rispetto <strong>del</strong>la continuità con gli elementi a<strong>di</strong>acenti.Figura 2.5: Raffigurazione <strong>del</strong> concetto <strong>di</strong> congruenza <strong>del</strong>le deformazioni [3].2.3.1 Problemi bi<strong>di</strong>mension<strong>al</strong>iD<strong>al</strong>le Eq.2.5, per un solido 2D possiamo semplicemente scrivere:ɛ x = ∂u∂x ,ɛ y = ∂v∂y ,γ xy = ∂u∂y + ∂v∂x(2.19)28
con derivazioni successive è possibile scrivere le relazioni:∂ 2 ɛ x∂y 2 = ∂3 u∂y 2 ∂x∂ 2 ɛ y∂x 2 = ∂3 v∂x 2 ∂y∂ 2 γ xy∂x∂y =∂3 u∂y 2 ∂x +∂3 v∂x 2 ∂yda cui otteniamo l’equazione <strong>di</strong> congruenza (nei testi inglesi viene detta compatibilità):∂ 2 ɛ x∂y 2 + ∂2 ɛ y∂x 2 = ∂2 γ xy(2.20)∂x∂yT<strong>al</strong>e equazione <strong>di</strong>fferenzi<strong>al</strong>e deve essere sod<strong>di</strong>sfatta d<strong>al</strong>le componenti <strong>di</strong> deformazioneper assicurare che esistano funzioni u e v continue che possano esprimerele deformazioni attraverso la Eq. 3.3.2.3.2 Problemi tri<strong>di</strong>mension<strong>al</strong>iNei problemi tri<strong>di</strong>mension<strong>al</strong>i si possono scrivere <strong>al</strong>tre due equazioni simili <strong>al</strong>laEq. 2.20 permutando gli in<strong>di</strong>ci x − y − z e si ottiene:⎧⎪⎨⎪⎩∂ 2 ɛ x∂y 2∂ 2 ɛ y∂z 2∂ 2 ɛ x∂z 2+ ∂2 ɛ y∂x 2+∂2 ɛ z∂y 2+∂2 ɛ z∂x 2= ∂2 γ xy∂x∂y=∂2 γ yz∂y∂z=∂2 γ xz∂x∂zAltre tre equazioni possono essere ottenute con ugu<strong>al</strong>e proce<strong>di</strong>mento:⎧∂ 2 ɛ x∂y∂z = ∂ (− ∂ɛ yz∂x ∂x + ∂ɛ xz∂y+ ∂ɛ )xy∂z⎪⎨∂ 2 ɛ y∂x∂z = ∂ (− ∂ɛ xz∂y ∂y+ ∂ɛ xy∂z+ ∂ɛ )yz∂x∂ ⎪⎩2 ɛ z∂x∂y = ∂ (− ∂ɛ xy∂z ∂z+ ∂ɛ yz∂x + ∂ɛ )xz∂y(2.21)(2.22)Si può <strong>di</strong>mostrare che le 6 equazioni <strong>di</strong>fferenzi<strong>al</strong>i <strong>del</strong> secondo or<strong>di</strong>ne 2.21 e 2.22sono equiv<strong>al</strong>enti a tre equazioni <strong>di</strong>fferenzi<strong>al</strong>i <strong>del</strong> quarto or<strong>di</strong>ne [3].2.3.3 Compatibilità per il FEM*Avendo introdotto la compatibilità attraverso la semplice spiegazione <strong>di</strong> Fig.2.5, v<strong>al</strong>e la pena approfon<strong>di</strong>re come la compatibilità sia verificata in una an<strong>al</strong>isiad Elementi Finiti.Quando un solido viene <strong>di</strong>scretizzato in elementi finiti, ad essi viene associatoun campo <strong>di</strong> spostamenti (u(x, y) e v(x, y) per problemi 2D, u(x, y, z), v(x, y, z)e w(x, y, z) per problemi 3D) che permetta <strong>di</strong> interpolare gli spostamenti nod<strong>al</strong>i,29
garantendo la compatibilità. Solitamente si assume una funzione polinomi<strong>al</strong>e,per esempio per u(x, y) si adotta una funzione <strong>del</strong> tipou(x, y) = β 1 + β 2 x + β 3 y + β 4 xy + β 5 x 2 + ... (2.23)Il numero <strong>di</strong> coefficienti deve essere ugu<strong>al</strong>e <strong>al</strong> numero <strong>di</strong> no<strong>di</strong> per permetterel’interpolazione (per esempio, un elemento a quatto no<strong>di</strong> potrà avere soltantoquattro termini). La scelta <strong>di</strong> questi termini è dettata d<strong>al</strong> rispetto <strong>del</strong>la con<strong>di</strong>zione<strong>di</strong> compatibilità, cioè in modo t<strong>al</strong>e da evitare compenetrazioni o lacerazioninel mo<strong>del</strong>lo quando i no<strong>di</strong> <strong>del</strong>l’elemento subiscono spostamenti 4 . All’interno<strong>del</strong>l’elemento la con<strong>di</strong>zione <strong>di</strong> compatibilità è automaticamente sod<strong>di</strong>sfatta inquanto la funzione polinomi<strong>al</strong>e è continua.Resta <strong>al</strong>lora da garantire la compatibilità tra un elemento e l’<strong>al</strong>tro, cioè leespressioni dei campi <strong>di</strong> spostamento per elementi <strong>di</strong>versi aventi un lato in comunedevono essere ugu<strong>al</strong>i quando v<strong>al</strong>utate lungo questo lato comune. Nel caso<strong>di</strong> elementi a quattro no<strong>di</strong>, la scelta che rispetta questa con<strong>di</strong>zione corrispondea un’espressione <strong>del</strong> tipo:u(x, y) = β 1 + β 2 x + β 3 y + β 4 xy (2.24)Si può facilmente verificare che quando v<strong>al</strong>utata lungo un lato, per esempio illato 1-2 <strong>del</strong>l’elemento <strong>di</strong> Fig. ??, l’espressione (2.24) <strong>di</strong>venta lineare. Infattiponendo x = x 2 = x 3 , si avrà un espressione <strong>del</strong> tipo:u(x, y) = β 1 + β 2 x 2 + β 3 y + β 4 x 2 y = α 1 + α 2 y (2.25)dove i v<strong>al</strong>ori dei coefficienti α 1 e α 2 <strong>di</strong>penderanno solo dai v<strong>al</strong>ori assunti daglispostamenti nod<strong>al</strong>i u 1 e u 2 dei no<strong>di</strong> 1 e 2 posti agli estremi <strong>del</strong> lato in questione.Questa considerazione v<strong>al</strong>e in gener<strong>al</strong>e, qu<strong>al</strong>siasi sia l’elemento avente i no<strong>di</strong>1 e 2 ai vertici <strong>di</strong> un lato, pertanto l’espressione sarà la stessa per l’elementostu<strong>di</strong>ato e per quello a<strong>di</strong>acente avente il lato 1-2 in comune. La con<strong>di</strong>zione <strong>di</strong>compatibilità risulta <strong>al</strong>lora sod<strong>di</strong>sfatta.yvxu4321u 1u 2Figura 2.6: Compatibilità degli spostamenti in elementi a 4 no<strong>di</strong>.4 Il termine costante β 1 deve essere presente per poter rappresentare moti rigi<strong>di</strong>.30
2.4 Legame elastico lineare per materi<strong>al</strong>i isotropiNei materi<strong>al</strong>i soli<strong>di</strong> isotropi le deformazioni, finchè non si raggiunge un livello <strong>di</strong>sforzo vicino <strong>al</strong>la con<strong>di</strong>zione <strong>di</strong> snervamento <strong>del</strong> materi<strong>al</strong>e, sono funzioni linearidegli sforzi attraverso le relazioni:⎧ɛ x = 1/E [ σ x − ν(σ y + σ z ) ]ɛ y = 1/E [ σ y − ν(σ x + σ z ) ]ɛ z = 1/E [ σ z − ν(σ x + σ y ) ]⎪⎨2(1 + ν)γ xy = τ xy(2.26)E2(1 + ν)γ yz = τ yzE⎪⎩2(1 + ν)γ xz = τ xzEdove E è il modulo <strong>di</strong> Young, ν è il modulo <strong>di</strong> Poisson e G =E2(1+ν)è il modulo<strong>di</strong> elasticità tangenzi<strong>al</strong>e. Nella sezione 2.5 (che verrà aggiunta per gli studenti20<strong>10</strong>/11) si esaminerà il legame <strong>di</strong> Hooke gener<strong>al</strong>izzato. Nel seguito <strong>di</strong> questasezione si esaminano <strong>al</strong>cune applicazioni e conseguenze <strong>del</strong>le (2.26).Esempio 2.3 Dato un recipiente sottile in acciaio chiuso ai fon<strong>di</strong> (ai fini <strong>di</strong> questoproblema non è rilevante la forma dei fon<strong>di</strong>) <strong>di</strong> <strong>di</strong>ametro D=400 mm e spessore s=5mm soggetto <strong>al</strong>la pressione interna p=<strong>10</strong> [MPa], ricavare lo spostamento ra<strong>di</strong><strong>al</strong>e <strong>del</strong>fasciame cilindrico <strong>del</strong> recipiente.Lo stato <strong>di</strong> sforzo nel recipiente è dato da:σ θ = p · D2sLa deformazione circonferenzi<strong>al</strong>e risulta:= 400 MPa σ z = p · D4sɛ θ = σ θ1 − ν/2E= 0.0017= 200 MPaLo spostamento ra<strong>di</strong><strong>al</strong>e risulta quin<strong>di</strong> (d<strong>al</strong>la (2.7)): u = 0.34 mm.Esempio 2.4 Si consideri un materi<strong>al</strong>e sollecitato lungo l’asse z, che è confinato inmodo che la deformazione lungo l’asse y sia impe<strong>di</strong>ta ma che possa invece deformarsilungo l’asse x (come se il materi<strong>al</strong>e fosse <strong>al</strong>l’interno <strong>di</strong> uno stampo rigido). Ricavarelo sforzo σ y e la rigidezza E ′ = σ z/ɛ z.Imponendo ɛ y = 0 nella seconda <strong>del</strong>le (2.26) si ricava:La deformazione lungo z risulta:σ y = νσ zɛ z = 1 E (σz − ν2 σ z) = 1 − ν2Eσz31
zσ zmateri<strong>al</strong>eystampoxFigura 2.7: Schema <strong>di</strong> un materi<strong>al</strong>e la cui deformazione lungo y è impe<strong>di</strong>ta.La rigidezza <strong>del</strong> materi<strong>al</strong>e lungo la <strong>di</strong>rezione z è quin<strong>di</strong>:E ′ = σzɛ z= E1 − ν 2Qun<strong>di</strong> l’impe<strong>di</strong>re una deformazione risulta in una maggiore rigidezza <strong>del</strong> materi<strong>al</strong>e sesollecitato nelle <strong>al</strong>tre <strong>di</strong>rezioni.2.4.1 Direzione sforzi e deformazioni princip<strong>al</strong>iPensando <strong>al</strong>l’an<strong>al</strong>isi speriment<strong>al</strong>e <strong>del</strong>lo stato <strong>di</strong> deformazione tramite rilievo conestensimetri, sorge spontanea la domanda se la <strong>di</strong>rezione <strong>del</strong>le deformazioniprincip<strong>al</strong>i è la stessa degli sforzi princip<strong>al</strong>i.An<strong>al</strong>izzando uno stato piano <strong>di</strong> deformazione, possiamo riscrivere la eq.(2.13) come (consideriamo la deformazione ɛ θ = ɛ X ′):ɛ θ = ɛ x + ɛ y2+ ɛ x − ɛ y2· cos 2θ + γ xy2sin 2θ (2.27)Sostituendo i v<strong>al</strong>ori <strong>del</strong>le deformazioni espressi in termini degli sforzi tramitela legge <strong>di</strong> Hooke per un materi<strong>al</strong>e isotropo, è quin<strong>di</strong> possibile c<strong>al</strong>colare queiv<strong>al</strong>ori <strong>di</strong> θ p per i qu<strong>al</strong>i dɛ θ /dθ = 0 (stiamo dunque cercando la <strong>di</strong>rezione <strong>del</strong>ledeformazioni princip<strong>al</strong>i). Risolvendo si ottiene:dɛ θdθ = 0 → tan 2θ p = 2 1+νEτ xy1+νE (σ x − σ y ) = 2τ xy(σ x − σ y )ovvero in campo elastico lineare la <strong>di</strong>rezione degli sforzi princip<strong>al</strong>i coincide conla <strong>di</strong>rezione <strong>del</strong>le deformazioni princip<strong>al</strong>i. Questo risultato è gener<strong>al</strong>izzabile aqu<strong>al</strong>siasi problema elastico lineare con materi<strong>al</strong>e isotropo.32
Esempio 2.5 Si consideri lo stato <strong>di</strong> deformazione <strong>del</strong>l’esempio 2.2: c<strong>al</strong>colare gli sforziprincip<strong>al</strong>i.In un problema piano la <strong>di</strong>rezione perpen<strong>di</strong>colare <strong>al</strong>la superficie libera è scarica equin<strong>di</strong> σ z = 0. Con questa con<strong>di</strong>zione è possibile c<strong>al</strong>colare gli sforzi princip<strong>al</strong>i tramiteinversione <strong>del</strong>le (2.26) ottenendo:⎧⎪⎨ σ 1 =E ( )ɛ1 + νɛ1 − ν 2 2⎪⎩ σ 2 =E ( )ɛ2 + νɛ1 − ν 2 1(2.28)da cui: σ 1 = 59.34 MPa e σ 2 = −42.2 MPa (nella re<strong>al</strong>tà gli sforzi princip<strong>al</strong>i, in accordo<strong>al</strong>la regola σ 1 > σ 2 > σ 3, sono: σ 1 = 59.34, σ 2 = 0 e σ 3 = −42.2) .2.4.2 Sforzo idrostatico e deformazione volumicaIntroducendo le Eq.(2.26) nella definizione <strong>di</strong> deformazione volumica ɛ V nerisulta:ɛ V = 1 − 2νE (σ x + σ y + σ z ) (2.29)da cui si può vedere come la deformazione volumica sia controllata da I 1 (oppured<strong>al</strong>lo sforzo idrostatico σ h = I 1 /3). Va anche annotato, per il comportamentoplastico, come per ν = 0.5 → ɛ V = 0.33
2.5 Legame sforzi-deformazioni in campo elastico2.5.1 Convenzione degli in<strong>di</strong>ci ripetutiPrima <strong>di</strong> introdurre il legame sforzi-deformazioni in campo elastico è opportunoricordare la convenzione degli in<strong>di</strong>ci ripetuti.In un’espressione la presenza <strong>di</strong> un in<strong>di</strong>ce ripetuto sottointende il simbolo <strong>di</strong>sommatoria:a i x i =n∑a i x i = a 1 x 1 + a 2 x 2 + a 3 x 3 + . . . a i x i + . . . a n x n (2.30)i=1Utilizzando la convenzione degli in<strong>di</strong>ci ripetuti <strong>di</strong>venta imme<strong>di</strong>ato scrivere<strong>al</strong>cune operazioni matrici<strong>al</strong>i come, per esempio, il prodotto tra due matrici:⎡⎤a 11 a 12 a 13[A] = ⎣a 21 a 22 a 23⎦ (2.31)a 31 a 32 a 33e⎡[B] = ⎣ b ⎤11 b 12 b 13b 21 b 22 b 23⎦ (2.32)b 31 b 32 b 33come[C] = c ij = [A] [B] =⎡⎣ a ⎤ ⎡11 a 12 a 13a 21 a 22 a 23⎦ ⎣ b ⎤11 b 12 b 13b 21 b 22 b 23⎦ = a ik b kj con i, k, j = 1, 2, 3a 31 a 32 a 33 b 31 b 32 b 33(2.33)dove l’in<strong>di</strong>ce ripetuto k deve essere inteso, ve<strong>di</strong> Eq.(2.30), come sommatoria:a ik b kj = a i1 b 1j + a i2 b 2j + a i3 b 3j (2.34)Scrivendo per esteso il prodotto a ik b kj si ottiene:⎡⎤a 1k b k1 a 1k b k2 a 1k b k3⎣a 2k b k1 a 2k b k2 a 2k b k3⎦ =a 3k b k1 a 3k b k2 a 3k b k3⎡⎤a 11 b 11 + a 12 b 21 + a 13 b 31 a 11 b 12 + a 12 b 22 + a 13 b 32 a 11 b 13 + a 12 b 23 + a 13 b 33⎣a 21 b 11 + a 22 b 21 + a 23 b 31 a 21 b 12 + a 22 b 22 + a 23 b 32 a 21 b 13 + a 22 b 23 + a 23 b 33⎦a 31 b 11 + a 32 b 21 + a 33 b 31 a 31 b 12 + a 32 b 22 + a 33 b 32 a 31 b 13 + a 32 b 23 + a 33 b 33(2.35)che, come è facile <strong>di</strong>mostare, è ugu<strong>al</strong>e <strong>al</strong> prodotto tra due matrici [A] e [B].34
2.5.2 Legge <strong>di</strong> Hooke gener<strong>al</strong>izzataUtilizzando la convenzione degli in<strong>di</strong>ci ripetuti è possibile esprimere la legge <strong>di</strong>Hooke gener<strong>al</strong>izzata che stabilisce il legame elastico tra le componenti <strong>di</strong> sforzoe quelle <strong>di</strong> deformazione:σ ij = C ijkl ɛ kl con i, j, k, l = 1, 2, 3 (2.36)dove σ ij e ɛ kl rappresentano rispettivamente il tensore <strong>del</strong> secondo or<strong>di</strong>ne deglisforzi e quello <strong>del</strong>le deformazioni. Il legame lineare elastico e rappresentato d<strong>al</strong>tensore C ijkl <strong>del</strong> quarto or<strong>di</strong>ne.In riferimento <strong>al</strong>l’Eq.(2.36) la prima componente <strong>del</strong> tensore degli sforzi puòessere scritta come:σ 11 = C 11kl ɛ kl =C 1111 ɛ 1111 + C 1112 ɛ 1112 + C 1113 ɛ 1113+ C 1121 ɛ 1121 + C 1122 ɛ 1122 + C 1123 ɛ 1123+ C 1131 ɛ 1131 + C 1132 ɛ 1132 + C 1113 ɛ 1133(2.37)e in maniera an<strong>al</strong>oga è possibile scrivere tutte le <strong>al</strong>tre componenti <strong>del</strong> tensoredegli sforzi. Il tensore C ijkl , considerando che ciascun in<strong>di</strong>ce può variare da 1 a 3,presenta quin<strong>di</strong> 3×3×3×3 = 81 costanti. Introducendo la simmetria <strong>del</strong> tensoredegli sforzi e <strong>di</strong> quello <strong>del</strong>le deformazioni il numero <strong>di</strong> costanti in<strong>di</strong>pendenti siriduce. La simmetria <strong>del</strong> tensore dgli sforzi impone che:e quin<strong>di</strong>:σ ij = σ ji (2.38)che impone la seguente con<strong>di</strong>zione:σ ij = C ijkl ɛ kl = σ ji = C jikl ɛ kl (2.39)C ijkl = C jikl (2.40)che riduce il numero <strong>di</strong> costanti in<strong>di</strong>pendenti. Si consideri per esempio il casoi = 1, j = 2:σ 12 = C 12kl ɛ kl = σ 21 = C 21kl ɛ kl (2.41)che introduce le seguenti 9 relazioni tra le 81 costanti:⎧C 1211 = C 2111C 1212 = C 2112C 1213 = C 2113⎪⎨ C 1221 = C 2121C 12kl = C 21kl = C 1222 = C 2122(2.42)C 1223 = C 2123C 1231 = C 2131C 1232 = C 2132⎪⎩C 1233 = C 213335
iducendo il numero <strong>di</strong> costanti in<strong>di</strong>pendenti a 81 − 9 = 72.Le stesse relazioni possono anche essere scritte per:{C13kl ɛ kl = C 31kl ɛ klC 23kl ɛ kl = C 32kl ɛ kl(2.43)ciascuna <strong>del</strong>le qu<strong>al</strong>i introduce <strong>al</strong>tre 9 relazioni, portando il numero complessivoa 72 − 2 × 9 = 54 costanti in<strong>di</strong>pendenti.Estendendo il ragionamento <strong>al</strong>la simmetria <strong>del</strong> tensore <strong>del</strong>le deformazioni,ɛ kl = ɛ lk , si possono scrivere <strong>al</strong>tre relazioni che <strong>di</strong>minuiscono il numero <strong>del</strong>lecostanti in<strong>di</strong>pendenti. Si può <strong>di</strong>mostare che le nuove relazioni sono pari a 6 × 3,riducendo fin<strong>al</strong>mente il numero <strong>di</strong> costanti in<strong>di</strong>pendenti a 54−6×3 = 36 costanti.Queste 36 costanti in<strong>di</strong>pendenti prendono il nome <strong>di</strong> moduli <strong>di</strong> rigidezza.Il legame tra le deformazioni e gli sforzi, ve<strong>di</strong> Eq.(2.36), può essere invertito,esprimendo le deformazioni in funzione degli sforzi, nel seguente modo:ɛ ij = S ijkl σ kl (2.44)In maniera an<strong>al</strong>oga a quanto visto in precedenza è possibile <strong>di</strong>mostare che ilnumero <strong>di</strong> costanti in<strong>di</strong>pendenti <strong>del</strong> tensore <strong>del</strong> quarto or<strong>di</strong>ne S ijkl è pari a 36.Queste 36 costanti in<strong>di</strong>pendenti prendono il nome <strong>di</strong> moduli <strong>di</strong> cedevolezza.2.5.3 Rappresentazione matrici<strong>al</strong>eIn <strong>al</strong>cune situazione, come per esempio l’implementazione <strong>del</strong>la legge <strong>di</strong> Hookein co<strong>di</strong>ci numerici, è conveniente introdurre la rappresentazione matrici<strong>al</strong>e <strong>del</strong>legrandezze tensori<strong>al</strong>i prima definite.A questo scopo il tensore degli sforzi, costituito da 9 componenti <strong>del</strong>le qu<strong>al</strong>isolo 6 in<strong>di</strong>pendenti, può essere scritto come un vettore:⎡ ⎤ ⎡ ⎤σ 1 σ 11σ 2σ 22[σ] =σ 3⎢σ 4=σ 33⎥ ⎢σ 23(2.45)⎥⎣σ 5⎦ ⎣σ 13⎦σ 6 σ 12dove v<strong>al</strong>gono le seguenti sostituzioni tra gli in<strong>di</strong>ci <strong>del</strong>la notazione tensori<strong>al</strong>e equella matrici<strong>al</strong>e:11 → 1 22 → 2 33 → 323 → 4 13 → 5 12 → 6Allo stesso modo il tensore <strong>del</strong>le deformazioni può essere scritto come:(2.46)36
⎡ ⎤ ⎡ ⎤ ⎡ ⎤ɛ 1 ɛ 11 ɛ 11ɛ 2ɛ 22ɛ 22[σ] =ɛ 3⎢ɛ 4=ɛ 33⎥ ⎢2ɛ 23=ɛ 33⎥ ⎢γ 23⎥⎣ɛ 5⎦ ⎣2ɛ 13⎦ ⎣γ 13⎦ɛ 6 2ɛ 12 γ 12(2.47)dove è stata introdotta anche la notazione ingegneristica <strong>del</strong>lo scorrimento angolareγ ij .Con questa notazione il tensore <strong>del</strong> quarto or<strong>di</strong>ne C ijkl , formato dai 36moduli <strong>di</strong> resistenza, <strong>di</strong>venta una matrice 6 × 6:σ ij = C ijkl ɛ kl =⇒ [σ] = [C] [ɛ] = σ i = C ij ɛ j =⇒⎡ ⎤ ⎡⎤ ⎡ ⎤σ 1 C 11 C 12 C 13 C 14 C 15 C 16 ɛ 1σ 2C 21 C 22 C 23 C 24 C 25 C 26ɛ 2σ 3⎢σ 4=C 31 C 32 C 33 C 34 C 35 C 36ɛ 3⎥ ⎢C 41 C 42 C 43 C 44 C 45 C 46⎥ ⎢ɛ 4⎥⎣σ 5⎦ ⎣C 51 C 52 C 53 C 54 C 55 C 56⎦ ⎣ɛ 5⎦σ 6 C 61 C 62 C 63 C 64 C 65 C 66 ɛ 6(2.48)dove la matrice [C] prende il nome <strong>di</strong> matrice <strong>di</strong> rigidezza e presenta 36costanti.Si può <strong>di</strong>mostare che la matrice <strong>di</strong> rigidezza è simmetrica. Considerandoinfatti il lavoro elastico per un’unità <strong>di</strong> volume:e derivando, si ottiene:∂W∂ɛ iW = 1 2 σ kɛ k (2.49)= σ i e ∂W∂ɛ j= σ j (2.50)Derivando ulteriormente, introducendo il legame elastico lineare, e imponendola con<strong>di</strong>zione <strong>di</strong> uguaglianza tra le derivate miste si ottiene la simmetria <strong>del</strong>lamatrice <strong>di</strong> rigidezza:∂ 2 W= C ji = ∂2 W= C ij =⇒ C ij = C ji (2.51)∂ɛ i ∂ɛ j ∂ɛ j ∂ɛ iche porta a concludere che la matrice <strong>di</strong> rigidezza è simmetrica, riducendoulteriormente il numero <strong>di</strong> costanti in<strong>di</strong>pendenti a 21:⎡⎤C 11 C 12 C 13 C 14 C 15 C 16C 12 C 22 C 23 C 24 C 25 C 26C ij =C 13 C 23 C 33 C 34 C 35 C 36⎢C 14 C 24 C 34 C 44 C 45 C 46(2.52)⎥⎣C 15 C 25 C 35 C 45 C 55 C 56⎦C 16 C 26 C 36 C 46 C 56 C 6637
In maniera an<strong>al</strong>oga si può definire la matrice <strong>di</strong> cedevolezza [S]:ɛ ij = S ijkl σ kl =⇒ [ɛ] = [S] [σ] = ɛ i = S ij σ j =⇒⎡ ⎤ ⎡⎤ ⎡ ⎤ɛ 1 S 11 S 12 S 13 S 14 S 15 S 16 σ 1ɛ 2S 12 S 22 S 23 S 24 S 25 S 26σ 2ɛ 3⎢ɛ 4=S 13 S 23 S 33 S 34 S 35 S 36σ 3⎥ ⎢S 14 S 24 S 34 S 44 S 45 S 46⎥ ⎢σ 4⎥⎣ɛ 5⎦ ⎣S 15 S 25 S 35 S 45 S 55 S 56⎦ ⎣σ 5⎦ɛ 6 S 16 S 26 S 36 S 46 S 56 S 66 σ 6(2.53)2.5.4 Simmetria nei materi<strong>al</strong>iI materi<strong>al</strong>i possono presentare <strong>del</strong>le simmetrie che riducono ulteriormente ilnumero <strong>del</strong>le costanti in<strong>di</strong>pendenti <strong>del</strong>la matrice <strong>di</strong> rigidezza.Un materi<strong>al</strong>e presenta una simmetria rispetto a due sistemi <strong>di</strong> riferimento,x i e x ′ i , se la matrice <strong>di</strong> rigidezza che lega sforzi e deformazioni rimane la stessa:σ ij = C ijkl ɛ kl ⇐⇒ σ i = C ij ɛ jσ ′ ij = C ′ ijklɛ ′ kl ⇐⇒ σ ′ i = C ′ ijɛ ′ j(2.54)Quin<strong>di</strong> se C ijlk = Cijlk ′ .Piano <strong>di</strong> simmetriaSi ipotizzi che il materi<strong>al</strong>e abbia un comportamento simmetrico rispetto <strong>al</strong> pianox 1 − x 2 , ve<strong>di</strong> Figura 2.8.Piano <strong>di</strong> simmetria materi<strong>al</strong>e (1)26x 3σ σ’ 33 33σ 32σ’ 32σ σ’ 2323σ 31 σ’ 31σ σ’ 2222x′2x 2σσ’ 13 13σ 21 σ’ 21σ σ’ 1212σ σ’ 11 11Piano <strong>di</strong> simmetria xx 1 Piano <strong>di</strong> simmetria x 1-x 2x′1-x 21⎡1R =⎢⎢0⎢⎣00<strong>10</strong>0 ⎤0⎥⎥−1⎥⎦x′3Figura 2.8: Piano <strong>di</strong> simmetria materi<strong>al</strong>e.Si può definire la matrice <strong>di</strong> rotazione per passare d<strong>al</strong> sistema <strong>di</strong> riferimento⎡1 0⎤0x i <strong>al</strong> sistema x ′ i : T = ⎣0 1 0 ⎦ (2.55)0 0 −138
ottenendo:[σ ′ ] = [T ] [σ] [ T T ] =⇒⎡⎤ ⎡ ⎤ ⎡⎤ ⎡ ⎤σ 11 ′ σ 12 ′ σ 13′ 1 0 0 σ 11 σ 12 σ 13 1 0 0⎣σ 12 ′ σ 22 ′ σ 23′ ⎦ = ⎣0 1 0 ⎦ ⎣σ 12 σ 22 σ 23⎦ ⎣0 1 0 ⎦ =⇒σ 13 ′ σ 23 ′ σ 33′ 0 0 −1 σ 13 σ 23 σ 33 0 0 −1⎡⎤ ⎡⎤σ 11 ′ σ 12 ′ σ 13′ σ 11 σ 12 −σ 13⎣σ 12 ′ σ 22 ′ σ 23′ ⎦ = ⎣ σ 12 σ 22 −σ 23⎦σ 13 ′ σ 23 ′ σ 33′ −σ 13 −σ 23 σ 33e pasando <strong>al</strong>la notazione vettori<strong>al</strong>e, Eq.(2.45) e Eq.(2.46):⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤σ 1′ σ σ 2′ 11′ σ 11 σ 1σ ′ σ 3′ 22σ 22σ 2⎢σ 4′ =σ 33′ ⎥ ⎢σ ′ =σ 33⎣σ 5′ 23⎥⎢−σ 23=σ 3⎥ ⎢−σ 4⎥⎦ ⎣σ ′ ⎦ ⎣σ 6′ 13 −σ 13⎦ ⎣−σ 5⎦σ 12′ σ 12 σ 6Lo stesso proce<strong>di</strong>mento può essere esteso <strong>al</strong>le deformazioni, ottenendo:⎡⎢⎣ɛ ′ 1ɛ ′ 2ɛ ′ 3ɛ ′ 4ɛ ′ 5ɛ ′ 6⎤ ⎡ ⎤ɛ 1ɛ 2=ɛ 3⎥ ⎢−ɛ 4⎥⎦ ⎣−ɛ 5⎦ɛ 6Introducendo la matrice <strong>di</strong> rigidezza si può scrivere:(2.56)(2.57)(2.58)σ i = C ij ɛ j =⇒ σ i = C i1 ɛ 1 + C i2 ɛ 2 + C i3 ɛ 3 + C i4 ɛ 4 + C i5 ɛ 5 + C i6 ɛ 6 (2.59)nel sistema <strong>di</strong> riferimento x i , e in maniera an<strong>al</strong>oga:σ ′ i = C ′ ijɛ ′ j =⇒ σ ′ i = C ′ i1ɛ ′ 1 + C ′ i2ɛ ′ 2 + C ′ i3ɛ ′ 3 + C ′ i4ɛ ′ 4 + C ′ i5ɛ ′ 5 + C ′ i6ɛ ′ 6 (2.60)nel sistema <strong>di</strong> riferimento x ′ i .Considerando per esempio i = 1 si ottiene:σ 1 = C 11 ɛ 1 + C 12 ɛ 2 + C 13 ɛ 3 + C 14 ɛ 4 + C 15 ɛ 5 + C 16 ɛ 6 (2.61)e, considerando l’Eq.(2.58) e la simmetria che impone C ij = C ′ ij :σ ′ 1 = C ′ 11ɛ ′ 1 + C ′ 12ɛ ′ 2 + C ′ 13ɛ ′ 3 + C ′ 14ɛ ′ 4 + C ′ 15ɛ ′ 5 + C ′ 16ɛ ′ 6= C ′ 11ɛ 1 + C ′ 12ɛ 2 + C ′ 13ɛ 3 − C ′ 14ɛ 4 − C ′ 15ɛ 5 + C ′ 16ɛ 6= C 11 ɛ 1 + C 12 ɛ 2 + C 13 ɛ 3 − C 14 ɛ 4 − C 15 ɛ 5 + C 16 ɛ 6(2.62)39
Ricordando infine che σ 1 = σ ′ 1, ve<strong>di</strong> Eq.(2.57), si ottiene:{C14 = −C 14C 15 = −C 15(2.63)che presenta come unica soluzione C 14 = C 15 = 0.Allo stesso modo si può <strong>di</strong>mostrare che:Tre piani <strong>di</strong> simmetriaC 24 = C 25 = C 34 = C 35 = C 46 = C 56 = 0 (2.64)Estendendo il <strong>di</strong>s<strong>corso</strong> precedente <strong>al</strong> caso <strong>di</strong> 3 piani <strong>di</strong> simmetria si ottiene, ve<strong>di</strong>Fig.(2.8):Piano <strong>di</strong> simmetria x 1 − x 2 : C 14 = C 15 = C 24 = C 25 = C 34 =Piano <strong>di</strong> simmetria x 2 − x 2 := C 35 = C 46 = C 56 = 0C 16 = C 26 = C 36 = C 45 = 0(2.65)Piano <strong>di</strong> simmetria x 1 − x 3 : nessuna con<strong>di</strong>zione aggiuntiva su C ijLa matrice <strong>di</strong> rigidezza <strong>di</strong>venta così formata da 9 costanti in<strong>di</strong>pendenti:⎡⎤C 11 C 12 C 13 0 0 0C 12 C 22 C 23 0 0 0C ij =C 13 C 23 C 33 0 0 0⎢ 0 0 0 C 44 0 0⎥⎣ 0 0 0 0 C 55 0 ⎦0 0 0 0 0 C 66(2.66)Asse <strong>di</strong> simmetria Materi<strong>al</strong>e trasvers<strong>al</strong>mente isotropo32⎡C⎢⎢C⎢C⎢⎢ 0⎢⎢ 0⎢⎣ 0Figura 2.9: Asse <strong>di</strong> simmetria.11 12 122112x 3x’ 3x’θ2θx 2x 1x’ 1CCC2223 40000CCC2322000C22000−C20023Materi<strong>al</strong>e trasvers<strong>al</strong>mente isotasse <strong>di</strong> simmetria rotazion<strong>al</strong>e x0000C66000000C66⎤⎥⎥⎥⎥⎥⎥⎥⎥⎦5 moduli <strong>di</strong> rigid
Con proce<strong>di</strong>mento an<strong>al</strong>ogo <strong>al</strong> precedente si può <strong>di</strong>mostare che nel caso <strong>di</strong>materi<strong>al</strong>e che presenta una simmetria rispetto ad una asse <strong>di</strong> rotazione x 1 , ve<strong>di</strong>Fig.(2.9), il numero <strong>di</strong> costanti in<strong>di</strong>pendenti <strong>del</strong>la matrice <strong>di</strong> rigidezza si riducea 5:⎡⎤C 11 C 12 C 12 0 0 0C 12 C 22 C 12 0 0 0C ij =C 12 C 12 C 33 0 0 0C⎢ 0 0 0 22−C 3320 0(2.67)⎥⎣ 0 0 0 0 C 66 0 ⎦0 0 0 0 0 C 66Tre assi <strong>di</strong> simmetriaNel caso <strong>di</strong> 3 assi <strong>di</strong> simmetria il numero <strong>di</strong> costanti in<strong>di</strong>pendenti si riduce a 2:⎡⎤C 11 C 12 C 12 0 0 0C 12 C 11 C 12 0 0 0C ij =C 12 C 12 C 11 0 0 0C⎢ 0 0 0 11−C 1220 0(2.68)⎥⎣C0 0 0 011−C 1220 ⎦0 0 0 0 02.5.5 Materi<strong>al</strong>e anisotropoC 11−C 122Un materi<strong>al</strong>e anisotropo non presenta nessun simmetria. La matrice <strong>di</strong> rigidezza,o cedevolezza, è formata da 21 costanti in<strong>di</strong>pendenti, ve<strong>di</strong> Eq.(2.52) e Eq.(2.53).2.5.6 Materi<strong>al</strong>e ortotropoUn materi<strong>al</strong>e ortotropo presenta 3 piani <strong>di</strong> simmetria riducendo il numero <strong>di</strong>costanti in<strong>di</strong>pendenti a 9, ve<strong>di</strong> Eq.(2.66).Le 9 costanti in<strong>di</strong>pendenti vengono gener<strong>al</strong>mente espresse rispetto ai moduli<strong>di</strong> elasticità E i e ai coefficienti <strong>di</strong> Poisson ν ij v<strong>al</strong>utati speriment<strong>al</strong>mente nelle<strong>di</strong>verse <strong>di</strong>rezioni <strong>del</strong> materi<strong>al</strong>e ortotropo.La matrice <strong>di</strong> cedevolezza può così essere scritta come:ɛ i = S ij σ j =⇒ [ɛ] = [C] [σ]⎡ ⎤ ⎡1ɛ 1 E ɛ 21− ν21E 2− ν31E 30 0 0− ν12 1E =⇒ɛ 31 E 2− ν32E 30 0 0− ν13E ⎢ɛ 4=1− ν23 1E 2 E 30 0 01⎥0 0 0⎣ɛ 5⎦ ⎢G 230 01⎣ 0 0 0 0G 130ɛ6<strong>10</strong> 0 0 0 0dove per simmetria v<strong>al</strong>gono le seguenti relazioni:⎤⎥⎦G 12⎡ ⎤σ 1σ 2σ 3⎢σ 4⎥⎣σ 5⎦σ 6(2.69)41
⎧ν 21= ν 12E ⎪⎨ 2 E 1ν 31= ν 13(2.70)E 3 E 1ν ⎪⎩ 23= ν 32E 2 E 3Allo stesso modo la matrice <strong>di</strong> rigidezza può così essere scritta come:σ i = C ij ɛ j =⇒ [σ] = [C] [ɛ] =⇒⎡ ⎤ ⎡ 1−νσ23ν 32 ν 21+ν 23ν 31 ν 31+ν 21ν 32⎤ ⎡ ⎤1E 2E 3∆ E 2E 3∆ E 2E 3∆0 0 0 ɛ 1σ 2ν 21+ν 23ν 31 1−ν 13ν 31 ν 32+ν 12ν 31E 2E 3∆ E 1E 3∆ E 1E 3∆0 0 0ɛ 2σ 3ν 31+ν 21ν 32 ν 32+ν 12ν 31 1−ν 12ν 21⎢σ 4=E 2E 3∆ E 1E 3∆ E 1E 2∆0 0 0ɛ 3⎥ ⎢ 0 0 0 G 23 0 0⎥ ⎢ɛ 4⎥⎣σ 5⎦ ⎣ 0 0 0 0 G 13 0 ⎦ ⎣ɛ 5⎦σ 6 0 0 0 0 0 G 12ɛ 6(2.71)dove:∆ = (1 − ν 12ν 21 − ν 23 ν 32 − ν 13 ν 31 − 2ν 21 ν 32 ν 13 )E 1 E 2 E 3(2.72)2.5.7 Materi<strong>al</strong>e isotropoUn materi<strong>al</strong>e isotropo presenta 3 assi <strong>di</strong> simmetria riducendo il numero <strong>di</strong>costanti in<strong>di</strong>pendenti a 2, ve<strong>di</strong> Eq.(2.68).Le 2 costanti in<strong>di</strong>pendenti vengono gener<strong>al</strong>mente espresse rispetto <strong>al</strong> modulo<strong>di</strong> elasticità E e <strong>al</strong> coefficienti <strong>di</strong> Poisson ν.La matrice <strong>di</strong> cedevolezza può così essere scritta come:dove si può <strong>di</strong>mostare che:ɛ i = S ij σ j =⇒ [ɛ] = [S] [σ]⎡ ⎤ ⎡1ɛ 1 E− ν E ɛ 2− ν ⎤ ⎡ ⎤E0 0 0 σ 1− ν 1E E− ν E0 0 0=⇒ɛ 3⎢ɛ 4=− ν E− σ 2ν 1E E0 0 0σ 31⎥ ⎢ 0 0 0G0 0⎥ ⎢σ 4⎥⎣ɛ 5⎦ ⎣<strong>10</strong> 0 0 0G0 ⎦ ⎣σ 5⎦1ɛ 6 0 0 0 0 0 σG 6(2.73)G =E2 (1 + ν)(2.74)T<strong>al</strong>e legame può anche essere espresso in maniera semplice utilizzando lanotazione in<strong>di</strong>ci<strong>al</strong>e:42
dove:ɛ ij = 1 + νE σ ij − ν E σ kkδ ij (2.75)e δ ij rappresenta il <strong>del</strong>ta <strong>di</strong> Kronecker:σ kk = σ 11 + σ 22 + σ 33 (2.76)δ ij ={ 1 se i = j0 se i ≠ jE’ possibile anche introdurre la notazione tensori<strong>al</strong>e:(2.77)dove:ɛ ij = S ijkl σ kl (2.78)S ijkl = − ν E δ ijδ kl + 1 + ν2E (δ ikδ jl + δ jk δ il ) (2.79)Allo stesso modo la matrice <strong>di</strong> rigidezza può così essere scritta come:σ i = C ij ɛ j =⇒ [σ] = [C] [ɛ] =⇒⎡ ⎤ ⎡(1−ν)E⎤νEνEσ 1 (1+ν)(1−2ν) (1+ν)(1−2ν) (1+ν)(1−2ν)0 0 0⎡ ⎤ɛ 1σ 2νE(1−ν)EνEσ 3(1+ν)(1−2ν) (1+ν)(1−2ν) (1+ν)(1−2ν)0 0 0ɛ 2νEνE(1−ν)E⎢σ 4=(1+ν)(1−2ν) (1+ν)(1−2ν) (1+ν)(1−2ν)0 0 0ɛ 3⎥⎣σ 5⎦ ⎢ 0 0 0 G 0 0⎥ ⎢ɛ 4⎥⎣ 0 0 0 0 G 0 ⎦ ⎣ɛ 5⎦σ 60 0 0 0 0 Gɛ 6(2.80)dove:G =E2 (1 + ν)Anche in questo caso è possibile introdurre la notazione in<strong>di</strong>ci<strong>al</strong>e:(2.81)dove:σ ij =E1 + ν ɛ νEij −(1 + ν)(1 − 2ν) ɛ kkδ ij (2.82)ɛ kk = ɛ 11 + ɛ 22 + ɛ 33 (2.83)E’ possibile infine anche introdurre la notazione tensori<strong>al</strong>e:dove:σ ij = C ijkl ɛ kl (2.84)43
νEC ijkl = −(1 + ν)(1 − 2ν) δ Eijδ kl +2(1 + ν) (δ ikδ jl + δ jk δ il ) (2.85)44
2.6 Appen<strong>di</strong>ceE’ utile scrivere le relazioni tra spostamenti e deformazioni nei riferimenti, <strong>di</strong>versida quello cartesiano finora adottato, cilindrico e sferico. T<strong>al</strong>i relazioniverranno utilizzate nei capitoli successivi per la soluzione <strong>di</strong> <strong>al</strong>cuni problemi relativi<strong>al</strong>lo stato <strong>di</strong> sforzo.Riferimento cilindrico (r, θ, z)Detti (u, v, w) gli spostamenti nelle <strong>di</strong>rezioni (r, θ, z), le deformazioni si esprimonocome:ɛ r =⎧⎪ ∂u∂r , ɛ θ = 1 ( ) ∂vr ∂θ + u , ɛ z = ∂w∂z( 1 ∂u⎨ γ rθ =r ∂θ + ∂v∂r − v )r( ∂wγ rz =∂r + ∂u )(2.86)∂r(⎪ ∂v⎩ γ θz =∂z + 1 )∂wr ∂θRiferimento sferico (r, θ, φ)Detti (u, v, w) gli spostamenti nelle <strong>di</strong>rezioni (r, θ, φ) (dove φ misura l’angolotra il raggio considerato e la <strong>di</strong>rezione positiva <strong>del</strong>l’asse z) , le deformazioni siesprimono come:⎧ɛ r = ∂u∂r , ɛ θ = 1 ( ) ∂vr ∂θ + u , ɛ z = 1r sin θ( 1 ∂u⎪⎨ γ rθ =r ∂θ + ∂v∂r − v )r( ∂wγ rφ =∂r − w r + 1 )∂ur sin θ ∂φ⎪⎩ γ θφ = 1 (sin θ ∂w)∂v− w cos θ +r sin θ ∂θ ∂φ( ∂w∂φ + u sin θ + v cos θ )(2.87)45
Parte IIProblemi elastici46
Capitolo 3Soluzione an<strong>al</strong>itica <strong>di</strong>problemi elastici pianiSi illustra la soluzione <strong>di</strong> una serie <strong>di</strong> problemi elastici importanti sulla base <strong>del</strong> potenzi<strong>al</strong>e<strong>di</strong> Airy. Questo tipo <strong>di</strong> an<strong>al</strong>isi sono sono <strong>del</strong>lo stesso tipo <strong>di</strong> quelle adottate per le lastrepiane e lo stato <strong>di</strong> sforzo <strong>al</strong>l’apice <strong>di</strong> fratture 1 .3.1 Problemi piani3.1.1 Stato <strong>di</strong> sforzo pianoConsideriamo ora il problema <strong>del</strong>la determinazione <strong>del</strong>lo stato <strong>di</strong> sforzo in unsolido bi<strong>di</strong>mension<strong>al</strong>e sottile in cui le facce later<strong>al</strong>i siano scariche (Fig. 3.1(a)).In t<strong>al</strong> caso σ z , σ xz , σ yz = 0 e lo stato <strong>di</strong> sforzo si riduce <strong>al</strong>le sole componenti:[σx σ xyσ y]che devono anche sod<strong>di</strong>sfare le con<strong>di</strong>zioni <strong>al</strong> contorno:{σx n x + σ xy n y = t xσ xy n x + σ y n y = t y(3.1)dove t x , t y sono le componenti <strong>del</strong>le forze <strong>di</strong> superficie applicate bordo <strong>del</strong> solidoe n x , n y sono le componenti <strong>del</strong> versore che definisce la <strong>di</strong>rezione <strong>del</strong>la norm<strong>al</strong>e <strong>al</strong>bordo. Risolvere lo stato <strong>di</strong> sforzo nel solido significa ricavare le tre componentiincognite con le con<strong>di</strong>zioni già viste:1 a cura <strong>di</strong> S. Beretta e M. Sangirar<strong>di</strong>47
(a)(b)Figura 3.1: Problemi piani: a) stato <strong>di</strong> sforzo piano; b) stato <strong>di</strong> deformazionepiana.equazioni <strong>di</strong> equilibrio:legame sforzi-deformazioni⎧⎪ ⎨⎪ ⎩∂σ x∂x + ∂σ xy∂y = 0∂σ xy∂x+ ∂σ y∂y = 0 (3.2)ɛ x = 1 E (σ x − νσ y ), ɛ y = 1 E (σ y − νσ x ), γ xy = 2(1+ν)Eɛ z = ν E (σ x + σ y ) γ xz = γ yz = 0σ xy(3.3)Sembra ragionevole pensare che nella membrana bi<strong>di</strong>mension<strong>al</strong>e che stiamo considerandogli spostamenti u, v siano funzione solo <strong>del</strong>le variabili x ed y e chenon vi sia <strong>al</strong>cuno spostamento w fuori d<strong>al</strong> piano: nella re<strong>al</strong>tà ɛ z ≠ 0 e quin<strong>di</strong> lamembrana varia <strong>di</strong> spessore da punto a punto.3.1.2 Stato <strong>di</strong> deformazione pianaSe consideriamo u = u(x, y) e v = v(x, y) insieme con la con<strong>di</strong>zione γ xz = γ yz =0, d<strong>al</strong>le Eq.2.5 si ricava che:∂w∂x = ∂w∂y = 0ovvero w è in<strong>di</strong>pendente da x ed y e, se consideriamo dei problemi come quelloin Fig.3.1(b) in cui il corpo è esteso indefinitamente nella <strong>di</strong>rezione z, ci immaginiamofacilmente che ɛ z non <strong>di</strong>penda da z. Poichè ɛ z = ∂w/∂z ne segue cheɛ z = c = cost.48
Questo tipo <strong>di</strong> stato <strong>di</strong> deformazione corrisponde a quello <strong>di</strong> un solido in cuile <strong>di</strong>mensioni <strong>del</strong> corpo lungo z fanno sì che le sezioni (perpen<strong>di</strong>colari <strong>al</strong>l’assez) si mantengano piane. Se come in Fig.3.1(b) il corpo è vincolato lungo z, ladeformazione è impe<strong>di</strong>ta e ɛ z = 0 2 . D<strong>al</strong>le Eq.2.5 si ricava che in t<strong>al</strong>e con<strong>di</strong>zione:Il legame sforzi-deformazioni risulta quin<strong>di</strong>:(σ x −ɛ x = 1 − ν2Eɛ y = 1 − ν2Eγ xy =σ z = ν(σ x + σ y ) (3.4)(σ y −ν )1 − ν σ yν )1 − ν σ x2(1 + ν)σ xy , γ xz = γ yz = 0E(3.5)Lo stato <strong>di</strong> deformazione piana è quin<strong>di</strong> corrispondente <strong>al</strong>lo sforzo piano con leposizioni (come già visto anche nell’esempio 2.4):3.1.3 SoluzioneĒ =E1 − ν 2 , ¯ν = ν1 − νSe ricor<strong>di</strong>amo la Eq. (2.20) <strong>di</strong> congruenza:∂ 2 ɛ x∂y 2+ ∂2 ɛ y∂x 2= ∂2 γ xy∂x∂yesprimendo le deformazioni in termini degli sforzi si ottiene:∂ 2∂y 2 (σ x − νσ y ) + ∂2∂x 2 (σ y − νσ x ) = 2(1 + ν) ∂2 σ xy∂x∂y(3.6)Derivando rispetto a x e y le equazioni <strong>di</strong> equilibrio e facendo la somma <strong>di</strong> t<strong>al</strong>iderivate si ottiene:∂ 2 σ x∂x 2+ ∂2 σ y∂y 2= −2∂2 σ xy∂x∂y(3.7)Introducendo t<strong>al</strong>e equazione in quella precedente fin<strong>al</strong>mente è possibile riscriverela Eq.(2.20) come:( )∂2∂x 2 + ∂2∂y 2 (σ x + σ y ) = 0 (3.8)Questa equazione, insieme con le equazioni <strong>al</strong> contorno, permette <strong>di</strong> risolvere informa chiusa dei problemi elastici 2D. L’ulteriore importante osservazione è cheσ x +σ y deve essere una funzione armonica in<strong>di</strong>pendente d<strong>al</strong>le caratteristiche <strong>del</strong>materi<strong>al</strong>e.2 Se non vi fossero vincoli la con<strong>di</strong>zione ɛ z = c si può ottenere facilmente sovrapponendo<strong>al</strong>lo stato <strong>di</strong> sforzo corrispondente a ɛ z = 0 uno sforzo uniforme che annulli la risultante deglisforzi in z.49
3.2 Funzione <strong>di</strong> AiryUn modo particolarmente efficace <strong>di</strong> trovare soluzioni per problemi elastici 2D fuproposto da Airy [1] che formulò che la soluzione potesse essere trovata tramiteuna funzione Φ = Φ(x, y) detta funzione <strong>di</strong> sforzo t<strong>al</strong>e che:⎧σ x = ∂2 Φ∂y 2⎪⎨⎪⎩σ y = ∂2 Φ∂x 2σ xy = − ∂2 Φ∂x∂y(3.9)Introducendo t<strong>al</strong>i posizioni, che sod<strong>di</strong>sfano le con<strong>di</strong>zioni <strong>di</strong> equilibrio, nellaEq.(3.8) si ottiene:∂ 4 Φ∂x 4 + 2 ∂4 Φ∂x 2 y 2 + ∂4 Φ∂y 4 = 0 (3.<strong>10</strong>)ovvero la funzione Φ deve essere biarmonica. Questo semplifica la ricerca <strong>del</strong>lasoluzione dei problemi elastici in quanto esistono dei meto<strong>di</strong> per ’costruire’funzioni biarmoniche [5]. Nel seguito esaminiamo <strong>al</strong>cuni semplici esempi.3.2.1 Semplici esempi <strong>di</strong> funzione ΦConsideriamo dapprima Φ in termini <strong>di</strong> un semplice polinomio <strong>del</strong> secondoor<strong>di</strong>ne:Φ = a 22 · x2 + b 2 · xy + c 22 · y2 (3.11)Per le (3.9) risulta:⎧⎨⎩σ x = c 2σ y = a 2(3.12)σ xy = −b 2ovvero la (3.11) rappresenta la funzione <strong>di</strong> sforzo che descrive una membranasoggetta ad uno stato <strong>di</strong> sforzo uniforme. Una funzione polinomi<strong>al</strong>e <strong>del</strong> terzoor<strong>di</strong>ne <strong>del</strong> tipo:Φ = a 36 · x3 + b 32 · x2 y + c 32 · xy2 + d 36 · y3 (3.13)fornisce <strong>del</strong>le componenti <strong>di</strong> sforzo che variano linearmente con le coor<strong>di</strong>natex, y: ⎧⎨⎩σ x = c 3 x + d 3 yσ y = a 3 x + b 3 yσ xy = −b 3 x − c 3 yse solo d 3 ≠ 0 <strong>al</strong>lora le componenti <strong>di</strong> sforzo <strong>di</strong>ventano:⎧⎨ σ x = d 3 yσ y = 0⎩σ xy = 0(3.14)(3.15)50
ovvero la Φ descrive una membrana soggetta a flessione semplice.3.2.2 Soluzioni per serieSemipiano elastico con pressione cosinusoid<strong>al</strong>eyxLLFigura 3.2: Semipiano indefinito caricato da una pressione tipo cos kx.Consideriamo un semipiano elastico caricato da uno sforzo σ y = σ 0 cos kx conk = 2π/L. Poichè lo stato <strong>di</strong> sforzo superfici<strong>al</strong>e ha una risultante nulla (su un<strong>al</strong>unghezza d’onda L) ci si aspetta che ad una <strong>di</strong>stanza sufficiente <strong>al</strong>l’interno <strong>del</strong>semispazio elastico lo stato <strong>di</strong> sforzo si annulli. Se consideriamo una funzione<strong>di</strong> sforzo <strong>del</strong> tipo:Φ(x, y) = f(y) · cos kx (3.16)introducendo t<strong>al</strong>e funzione nella Eq.(3.<strong>10</strong>) ne risulta una equazione <strong>di</strong>fferenzi<strong>al</strong>e:la cui soluzione è <strong>del</strong> tipo:d 4 fdy 4 − 2k2 d2 fdy 2 + k4 f = 0 (3.17)f(y) = A · e ky + B · e −ky + C · y · e ky + D · y · e −ky (3.18)Le costanti A, B, C, D si ricavano con le con<strong>di</strong>zioni <strong>al</strong> contorno. In particolarela con<strong>di</strong>zione che per y → ∞ lo stato <strong>di</strong> sforzo si annulli impone che A = C = 0.Ricavando le componenti <strong>di</strong> sforzo ed imponendo le con<strong>di</strong>zioni <strong>al</strong> contorno siricavano le costanti B e D, in particolare:{ {σy (x, 0) = σ 0 cos kx B = −σ0 /k 2→σ xy (x, 0) = 0D = −σ 0 /kLo stato <strong>di</strong> sforzo nel semipiano elastico risulta quin<strong>di</strong>:⎧⎪⎨σ y = (1 + ky)σ 0 · e −ky · cos kxσ x = (1 − ky)σ 0 · e −ky · cos kx⎪⎩σ xy = −kσ 0 · y · e −ky · sin kx(3.19)51
Si può facilmente verificare come lo stato <strong>di</strong> sforzo <strong>di</strong>minuisca rapidamente <strong>al</strong>l’interno<strong>del</strong> semipiano elastico (ad esempio risulta σ y (x, L) = 0.014σ 0 cos kx),confermando il principio <strong>di</strong> Saint-Venant.Barretta caricata assi<strong>al</strong>mente da una pressione loc<strong>al</strong>eConsideriamo il problema <strong>di</strong> una barretta caricata su due lati da una pressionecostante q su un segmento <strong>di</strong> lunghezza 2a. La pressione q può essererappresentata d<strong>al</strong>la seguente serie:q = A 0 +∞∑m=1A m cos mπxL(3.20)dove:A 0 = qa LA m = 1 L∫ a−aq cos mπxLdx = 2q sin(mπa/L)mπLa Φ che risolve il problema conterrà un termine in x 2 e dei termini come quelli<strong>del</strong>la Eq.(3.16) per ognuna <strong>del</strong>le m armoniche. Lo stato <strong>di</strong> sforzo [1] σ y risulta:σ y = − qa ∞∑ sin αa (αc cosh αc + sinh αc) cosh αy − αy sinh αy sinh αccos αxL msinh 2αc + 2αcm=1(3.21)in cui α = mπ/L.Se immaginiamo il caso <strong>di</strong> una barretta caricata da una forza P concentratasi può utilizzare la stessa soluzione immaginando che a → 0 e qa = P/2. Inparticolare la <strong>di</strong>stribuzione <strong>di</strong> sforzo σ y nella barretta appare quasi uniformegià ad una <strong>di</strong>stanza pari <strong>al</strong>la larghezza <strong>del</strong>la barretta, similmente ai risultati giàottenuti con lo smorzamento <strong>del</strong>le tensioni nel semipiano elastico, in accordo <strong>al</strong>principio <strong>di</strong> Saint-Venant.52
aaqcycxqLLFigura 3.3: Barretta caricata da una pressione loc<strong>al</strong>izzata.PcyxcLLP(a)(b)Figura 3.4: Barretta caricata da un carico concentrato: a) schema; b) soluzione [1].53
3.3 Problemi in coor<strong>di</strong>nate polariE’ interessante applicare la metodologia <strong>di</strong> soluzione <strong>di</strong> Airy a problemi elasticiin coor<strong>di</strong>nate polari: ve<strong>di</strong>amo dapprima come si esprimono le equazionifondament<strong>al</strong>i in coor<strong>di</strong>nate polari e poi vedremo <strong>al</strong>cune soluzioni in termini <strong>di</strong>funzione <strong>di</strong> sforzo. Il legame tra spostamenti e deformazioni in coor<strong>di</strong>nate polariè:ɛ r = ∂u r∂r , ɛ θ = u rr + ∂u θr∂θ , γ rθ = ∂u rr∂θ + ∂u θ∂r − u θ(3.22)rIl legame tra sforzi e deformazioni è simile a quello <strong>del</strong>le coor<strong>di</strong>nate rettangolari:ɛ r = 1 E (σ r − νσ θ ), ɛ θ = 1 E (σ θ − νσ r ), γ xy =Le con<strong>di</strong>zioni <strong>di</strong> equilibrio in coor<strong>di</strong>nate polari risultano:⎧∂σ r ⎪⎨∂r + 1 r⎪⎩ 1r∂τ rθ∂θ+ σ r − σ θr+ b r = 0∂σ θ∂θ + ∂τ rθ∂r+ 2τ rθr + b θ = 02(1 + ν)σ rθ (3.23)E(3.24)Se cerchiamo <strong>di</strong> esprimere la Eq.(3.8) in coor<strong>di</strong>nate polari conviene prima <strong>di</strong>tutto scrivere le componenti <strong>di</strong> sforzo nel nuovo sistema <strong>di</strong> riferimento. D<strong>al</strong>leEq.(1.9) si ottiene (scrivendo in funzione <strong>del</strong>l’angolo 2θ 3 ):⎧⎪⎨⎪⎩σ r = σ x + σ y2σ θ = σ x + σ y2σ rθ = − σ x − σ y2+ σ x − σ y2− σ x − σ y2sin 2θ + σ xy cos 2θDa t<strong>al</strong>i equazioni si può facilmente verificare che:σ x + σ y = σ r + σ θcos 2θ + σ xy sin 2θcos 2θ − σ xy sin 2θ(3.25)Poichè il laplaciano <strong>di</strong> una funzione f si può esprimere come:( ) ( ∂2∂x 2 + ∂2 ∂2∂y 2 f =∂r 2 + ∂ )r∂r +∂2r 2 ∂θ 2 f (3.26)si può esprimere la Eq.(3.8) come:( ∂2∂r 2 +∂r∂r +)∂2r 2 ∂θ 2 (σ r + σ θ ) = 0 (3.27)3 ricordando che cos 2 θ = (1 − cos 2θ)/2, sin 2 θ = (1 + cos 2θ)/2 e 2 sin θ cos θ = sin 2θ54
La funzione <strong>di</strong> Airy in coor<strong>di</strong>nate polari è una funzione Φ t<strong>al</strong>e che:⎧σ r = 1 ∂Φr ∂r ⎪⎨+ ∂2 Φr 2 ∂θ 2σ θ = ∂2 Φ∂r 2⎪⎩ σ rθ = 1 ∂Φr 2 ∂θ − 1 ∂ 2 Φr ∂r∂θ(3.28)Con t<strong>al</strong>i posizioni, che sod<strong>di</strong>sfano le con<strong>di</strong>zioni <strong>di</strong> equilibrio, la (3.27) <strong>di</strong>venta:( ∂2∂r 2 + ∂ )(r∂r +∂2 ∂ 2 Φr 2 ∂θ 2 ∂r 2 + ∂Φ )r∂r + ∂2 Φr 2 ∂θ 2 = 0 (3.29)Problemi assi<strong>al</strong>simmetriciConsideriamo ora un sottoinsieme <strong>di</strong> problemi elastici piani: i problemi elasticinei qu<strong>al</strong>i lo stato <strong>di</strong> sforzo e deformazione non <strong>di</strong>pende da θ (lo sforzo e deformazioneè ugu<strong>al</strong>e per ogni θ e possiamo quin<strong>di</strong> <strong>di</strong>re che ogni piano ra<strong>di</strong><strong>al</strong>e è <strong>di</strong>simmetria). In t<strong>al</strong>i con<strong>di</strong>zioni l’unico campo <strong>di</strong> spostamento è u r e le Eq.(3.22)si semplificano in:ɛ r = ∂u r∂rɛ θ = u rrγ rθ = 0 (3.30)Immaginiamo per i problemi assi<strong>al</strong>simmetrici una funzione <strong>di</strong> sforzo Φ = Φ(r),in t<strong>al</strong> caso l’equazione biarmonica <strong>di</strong>venta una equazione <strong>di</strong>fferenzi<strong>al</strong>e:( d2dr 2 + 1 )(d d 2 Φr dr dr 2 + 1 )dΦ(3.31)r drche ammette una soluzione <strong>del</strong> tipo:Φ(r) = A log r + Br 2 log r + Cr 2 + D (3.32)3.3.1 Membrana forata soggetta a carico biassi<strong>al</strong>eConsideriamo il problema <strong>di</strong> una membrana contenente un foro <strong>di</strong> raggio ae soggetta ad un carico remoto S biassi<strong>al</strong>e (Fig.3.6), il problema può essererisolto sulla base <strong>del</strong>la Φ(r) prima vista. In particolare le componenti <strong>di</strong> sforzorisultano:⎧⎪σ r = A + B(1 + 2 log r) + 2C⎨ r2 ⎪ ⎩σ θ = − A + B(3 + 2 log r) + 2Cr2 σ rθ = 0(3.33)55
SS2aSSFigura 3.5: Membrana forata soggetta ad uno sforzo remoto S biassi<strong>al</strong>e (S, S, 0)Poichè per r → ∞ lo sforzo deve essere finito deve essere B = 0 4 , imponendole ulteriori con<strong>di</strong>zioni <strong>al</strong> contorno si ottengono le costanti A e C. In particolare:{σr = S per r → ∞σ r (a) = 0→{ 2C = SA = −Sa 2Lo stato <strong>di</strong> sforzo nella membrana forata risulta quin<strong>di</strong>:( ) ( )σ r = S 1 − a2rσ 2 θ = S 1 + a2r 2(3.34)Si può vedere come per r = a risulta σ θ = 2S, ovvero nella membrana soggettaad un carico biassi<strong>al</strong>e un foro piccolo (piccolo rispetto <strong>al</strong>le <strong>di</strong>mensioni <strong>del</strong>lamembrana) crea una concentrazione <strong>di</strong> sforzo con K t = 2.3.3.2 Foro in una membrana indefinita soggetto a caricora<strong>di</strong><strong>al</strong>eConsideriamo una membrana indefinita con una foro <strong>di</strong> raggio a soggetta ad uncarico ra<strong>di</strong><strong>al</strong>e S. La soluzione è ancora <strong>del</strong> tipo precedente con:⎧σ r = A ⎪⎨ r 2 + 2Cσ θ = − A r ⎪⎩2 + 2C(3.35)σ rθ = 04 il termine B corrisponde a spostamenti non assi<strong>al</strong>simmetrici [1] e può venire annullatoanche imponendo che il campo <strong>di</strong> spostamenti <strong>del</strong> problema in esame (come in questo caso)sia assi<strong>al</strong>simmetrico.56
S2aFigura 3.6: Membrana forata soggetta ad un carico ra<strong>di</strong><strong>al</strong>e SImponendo le con<strong>di</strong>zioni <strong>al</strong> contorno si ottiene la <strong>di</strong>stribuzione <strong>di</strong> sforzo:⎧{σr = 0 per r → ∞⎪⎨ σ r = S a2→r 2(3.36)σ r (a) = S⎪⎩ σ θ = −S a2r 2Possiamo quin<strong>di</strong> <strong>di</strong>re che un carico <strong>di</strong>stribuito sul contorno <strong>del</strong> foro da unaconcentrazione <strong>di</strong> sforzo loc<strong>al</strong>e con un K t = −1.Esempio 3.1 Si può arrivare <strong>al</strong>lo stesso risultato immaginando che lo stato <strong>di</strong> sforzo<strong>di</strong> Fig. 3.6 sia la sovrapposizione <strong>di</strong> due stati <strong>di</strong> sforzo qui <strong>di</strong> seguito rappresentati, <strong>di</strong>cui il primo è uno stato <strong>di</strong> sforzo biassi<strong>al</strong>e uniforme.SSSSSSS2a2aS(a)S(b)Figura 3.7: Membrana forata soggetta a carico assi<strong>al</strong>e come sovrapposizione <strong>di</strong>:a) sforzo uniforme; b) sforzo (−S, −S, 0).57
3.3.3 Membrana forata soggetta a taglioConsideriamo la membrana forata indefinita già esaminata soggetta ad unosforzo remoto (0, 0, S):σ x = 0 σ y = 0 σ xy = Slo sforzo remoto in coor<strong>di</strong>nate polari risulta:σ r = S sin 2θ σ θ = −S sin 2θ σ rθ = S cos 2θPer θ = π/4 si ha σ r = S, σ θ = −S, σ rθ = 0 che corrisponde <strong>al</strong>lo stato <strong>di</strong> sforzonelle <strong>di</strong>rezioni princip<strong>al</strong>i (Fig.3.8(b)). Ricordando le Eq.(3.28) ricerchiamo,come già visto in Sez.3.2.2, una funzione <strong>di</strong> sforzo <strong>del</strong> tipo:Φ(r, θ) = f(r) sin 2θCon t<strong>al</strong>e posizione l’equazione biarmonica <strong>di</strong>venta:( d2dr 2 + 1 dr dr − 4 )( d 2 fr 2 dr 2 + 1 dfr dr − 4f )r 2(3.37)Inserendo una soluzione <strong>del</strong> tipo f(r) = r m si ottengono le 4 ra<strong>di</strong>ci 2, −2, 0, 4e corrispondentemente la funzione <strong>di</strong> sforzo sarà:Φ(r, θ) =(Ar 2 + Br 4 + C )r 2 + D sin 2θ (3.38)SSBASS2a(a)2a(b)Figura 3.8: Membrana forata soggetta a taglio: a) sforzo (0, 0, S); b) sforzo incoor<strong>di</strong>nate polari (è evidenziato lo stato <strong>di</strong> sforzo per θ = π/4).58
Le componenti <strong>di</strong> sforzo risultano:⎧ (σ r = − 2A + 6Cr⎪⎨4 + 4D )r 2 sin 2θ(σ θ = 2A + 12Br 2 + 6C )r 4 sin 2θ(⎪⎩ σ rθ = − 2A − 6Br 2 + 6Cr 4 + 2D )r 2 cos 2θImponendo le con<strong>di</strong>zioni <strong>al</strong> contorno:{σr = S sin 2θ per r → ∞σ rθ = S cos 2θ per r → ∞ → {A = −S/2B = 0e: { {σr (a) = 0σ rθ (a) = 0 →D = Sa 2C = −Sa 4 /2Lo stato <strong>di</strong> sforzo nella membrana risulta quin<strong>di</strong>:⎧σ r = S ( 1 + 3 a4r 4 − ) 4a2 sin 2θr 2⎪⎨⎪⎩σ θ = −S ( 1 + 3 a4) sin 2θr4 σ rθ = S ( 1 − 3 a4r 4 + 2a2r 2 )cos 2θ(3.39)Se an<strong>al</strong>izziamo lo stato <strong>di</strong> sforzo nei punti A (θ = π/4) e B (θ = 3π/4) sul bordo<strong>del</strong> foro otteniamo: ⎧⎪⎨⎪ ⎩σ θ (a, π 4 ) = −4Sσ θ (a, 3 π) = 4S4Considerando lo stato <strong>di</strong> sforzo remoto (<strong>di</strong> trazione per θ = π/4 e <strong>di</strong> compressioneper θ = 3π/4), ne possiamo concludere che uno sforzo remoto tangenzi<strong>al</strong>eprovoca sul bordo <strong>del</strong> foro un fattore <strong>di</strong> concentrazione degli sforzi K t = 4 incorrispondenza <strong>del</strong>le <strong>di</strong>rezioni degli sforzi princip<strong>al</strong>i.3.3.4 Membrana forata soggetta a carico assi<strong>al</strong>eSoluzione an<strong>al</strong>iticaLo stato <strong>di</strong> sforzo nella membrana (vedasi il riferimento <strong>di</strong> Fig.3.9) risulta:⎧σ r = S (1 + cos 2θ)2 ⎪⎨σ θ = S (1 − cos 2θ)(3.40)2⎪⎩ σ rθ = − S 2 sin 2θ59
ISAyBθrxIIS2aFigura 3.9: Membrana forata soggetta ad un carico assi<strong>al</strong>e.Dovendo imporre le con<strong>di</strong>zioni <strong>al</strong> contorno remoto e sul foro circolare scarico, sipuò utilizzare una funzione <strong>di</strong> Airy <strong>del</strong> tipo:Φ(r, θ) = Ar 2 + B log r + Cr 2 cos 2θ + D cos 2θ + F cos 2θ (3.41)r2 Tramite le Eq.(3.28) si ottengono le componenti <strong>di</strong> sforzo. Imponendo che perr → ∞ lo stato <strong>di</strong> sforzo equiv<strong>al</strong>ga <strong>al</strong>le (3.40) si ottiene:{A = S/4Imponendo che per r = a:{σr (a, θ) = 0σ rθ (a, θ) = 0La <strong>di</strong>stribuzione fin<strong>al</strong>e <strong>di</strong> sforzo risulta:⎧⎪⎨σ r (r, θ) = S 2 − Sa22r 2 + S 2σ θ (r, θ) = S 2 + Sa22r 2 − S 2⎪⎩ σ rθ (r, θ) = − S 2Sul bordo <strong>del</strong> foro lo sforzo risulta:C = −S/4→⎧⎨⎩B = −Sa 2 /2F = Sa 2 /2D = −Sa 4 /4cos 2θ + 3Sa4 cos 2θ − 2Sa22r4 r 2 cos 2θcos 2θ − 3Sa4 cos 2θ2r4 Sa2sin 2θ + 3Sa4 sin 2θ −2r4 σ r = 0σ θ = S · (1 − 2 cos 2θ)τ rθ = 0I massimi e minimi <strong>di</strong> σ theta sono:σ θ,A = 3S per θ = π/2, 3π/2σ θ,B = −S per θ = 0, πr 2 sin 2θ (3.42)(3.43)60
Se consideriamo la sezione I − I, che passa per il centro <strong>del</strong> foro e corrispondea θ = π/2, gli sforzi d<strong>al</strong>la (3.42) risultano (Fig. 3.<strong>10</strong>):σ r = 3 ( ) a22 S r 2 − a4r 4σ θ = 1 ()2 S 2 + a2r 2 + 3a4 r 4τ rθ = 0(3.44)E’ facile vedere il carattere loc<strong>al</strong>e <strong>del</strong>la concentrazione <strong>di</strong> sforzo in quanto σ θdecresce molto rapidamente e tende <strong>al</strong>lo sforzo S. Già per r/a = 5 si ottieneσ θ = 1.02S e quin<strong>di</strong> a partire da una t<strong>al</strong>e <strong>di</strong>stanza l’effetto <strong>del</strong> foro è trascurabile.Lungo la linea II − II (θ = 0) gli sforzi sono (Fig. 3.11):σ r = 1 ()2 S 2 − 5 a2r 2 + 3a4 r 4σ θ = 1 ( ) a22 S r 2 − 3a4 r 4τ rθ = 0(3.45)Anche in questo caso va annotato il carattere loc<strong>al</strong>e <strong>del</strong>lo sforzo circonferenzi<strong>al</strong>ein B, l’andamento <strong>di</strong> σ θ cambia <strong>di</strong> segno in quanto la risultante <strong>di</strong> t<strong>al</strong>i sforzilungo la linea II − II deve essere nulla.Soluzione come sovrapposizione degli effettiSe consideriamo una membrana caricata da uno sforzo (0, S, 0) si può notarecome lo stato <strong>di</strong> sforzo possa ottenersi come sovrapposizione dei due stati <strong>di</strong>32.5! "/ S! r/ S2! "/ S, ! r/ S1.5<strong>10</strong>.501 2 3 4 5 6 7 8 9 <strong>10</strong>r/aFigura 3.<strong>10</strong>: Sforzi a<strong>di</strong>mension<strong>al</strong>izzati lungo la linea I − I.61
<strong>10</strong>.8! "/ S! r/ S0.60.4! "/ S, ! r/ S0.20−0.2−0.4−0.6−0.8−11 2 3 4 5 6 7 8 9 <strong>10</strong>r/aFigura 3.11: Sforzi a<strong>di</strong>mension<strong>al</strong>izzati lungo la linea II − II.sforzo mostrati in Fig.3.12 dei qu<strong>al</strong>i già conosciamo le soluzioni. In particolarenel punto A (sulla base dei K t <strong>del</strong>le sezioni precedenti) lo stato <strong>di</strong> sforzocirconferenzi<strong>al</strong>e risulta:σ θ = 2 · (0.5S) + 4 · (0.5S) = 3S0.5 S0.5 S0.5 S0.5 S0.5 S0.5 S0.5 S(a)0.5 S(b)Figura 3.12: Membrana forata soggetta a carico assi<strong>al</strong>e come sovrapposizione <strong>di</strong>:a) sforzo (0.5S, 0.5S, 0); b) sforzo (−0.5S, 0.5S, 0).e nel punto B:σ θ = 2 · (0.5S) − 4 · (0.5S) = −SLo stato <strong>di</strong> sforzo lungo le linee I e II può <strong>al</strong>tresì essere ottenuto sovrapponendoσ r e σ θ dei due casi.62
3.3.5 Carico concentrato su un semispazio elasticoData una membrana caricata da una forza concentrata P (P è una forza per unità<strong>di</strong> lunghezza poichè ripartita sull’intero spessore <strong>del</strong>la membrana <strong>di</strong> spessoreunitario, Fig. 3.13), è possibile c<strong>al</strong>colare in modo semplice la <strong>di</strong>stribuzione <strong>di</strong>sforzo esatta nella membrana. Poichè per r → ∞ lo sforzo deve annullarsi èfacile immaginare (anche d<strong>al</strong> punto <strong>di</strong> vista <strong>di</strong>mension<strong>al</strong>e) che le componenti <strong>di</strong>sforzo debbano essere espressi da relazioni <strong>del</strong> tipo:Se ipotizziamo una funzione <strong>di</strong> sforzo <strong>del</strong> tipo:σ ij (r, θ) = P r g ij(θ) (3.46)Φ = rP f(θ) (3.47)introducendo nella Eq.(3.29) <strong>di</strong>venta una equazione <strong>di</strong>fferenzi<strong>al</strong>e or<strong>di</strong>naria:la cui soluzione è:f + 2 d2 fdθ 2 + d4 fdθ 4 = 0 (3.48)f(θ) = A sin θ + B cos θ + Cθ sin θ + Dθ cos θ (3.49)Ne risulta una funzione <strong>di</strong> sforzo:Φ = rP ( A sin θ + B cos θ + Cθ sin θ + Dθ cos θ ) (3.50)Poichè i termini in sin θ e cos θ non danno contributi agli sforzi (essendo x =r cos θ ed y = r sin θ) e cerchiamo una soluzione t<strong>al</strong>e che σ r sia simmetricarispetto a θ = 0, se ne ricava che la funzione <strong>di</strong> sforzo sarà:Φ(r, θ) = rP Cθ sin θ (3.51)Figura 3.13: Carico P concentrato sul bordo <strong>di</strong> una membrana.63
La costante C si ricava imponendo che lungo una semicirconferenza <strong>di</strong> raggio rvi sia equilibrio <strong>al</strong>la traslazione in x:∫ π/2−π/2σ r cos θrdθ = −P (3.52)da cui si ottiene C = −1/π. Le equazioni <strong>del</strong>lo stato <strong>di</strong> sforzo risultano:⎧⎨σ r = − 2P cos θπ r⎩σ θ = σ rθ = 0(3.53)ovvero la forza P da origine solo a degli sforzi ra<strong>di</strong><strong>al</strong>i mentre le <strong>al</strong>tre componenti<strong>di</strong> sforzo sono nulle. E’ importante annotare come lo stato <strong>di</strong> sforzo sia singolare,ovvero per r → 0 σ r → ∞: tuttavia in un componente vero a mitigarequesta singolarità interviene la non-linearità <strong>del</strong> contatto (se immaginiamo adesempio il contatto <strong>di</strong> una superficie cilindrica <strong>di</strong> raggio qu<strong>al</strong>unque sul semipianoelastico, il contatto ide<strong>al</strong>mente è puntiforme come in Fig.3.13 ma gli sforzifanno deformare le superfici a contatto facendo aumentare l’area <strong>di</strong> contatto)ed eventu<strong>al</strong>mente la plasticizzazione loc<strong>al</strong>izzata nella zone <strong>di</strong> applicazione <strong>del</strong>carico.Se c<strong>al</strong>coliamo le componenti <strong>di</strong> sforzo nel riferimento X − Y <strong>di</strong> Fig. 3.13 aduna <strong>di</strong>stanza h d<strong>al</strong> bordo <strong>del</strong>la membrana otteniamo:⎧σ x = σ r cos 2 θ = − 2P cos 3 θ= − 2P⎪⎨π r πh cos4 θσ y = σ θ sin 2 θ = − 2Pπh sin2 θ cos 2 θ(3.54)⎪⎩σ xy = σ rθ sin θ cos θ = − 2Pπh sin θ cos3 θL’andamento <strong>di</strong> t<strong>al</strong>i sforzi è riportato in Fig.3.15: si nota come gli sforzi (il cuiv<strong>al</strong>ore massimo è inversamente proporzion<strong>al</strong>e ad h) decrescano rapidamente conla <strong>di</strong>stanza d<strong>al</strong>la retta <strong>di</strong> applicazione <strong>del</strong> carico.Una soluzione approssimata σ ∗ x per la componente <strong>di</strong> sforzo nella <strong>di</strong>rezione <strong>del</strong>carico può essere trovata immaginando che gli sforzi σ ∗ x dovuti a P si sviluppinosu un settore angolare <strong>del</strong> semipano <strong>di</strong> semiampiezza π/4 [6]. Il v<strong>al</strong>ore <strong>di</strong>t<strong>al</strong>e sforzo v<strong>al</strong>e σ ∗ x = −P/2h e sottostima <strong>del</strong> 27% il v<strong>al</strong>ore massimo effettivoσ x,max = −2P/πh.64
0.4" x0.2" y# xy02P/(! h)−0.2−0.4−0.6−0.8−1−5 −4 −3 −2 −1 0 1 2 3 4 5y/hFigura 3.14:semipiano.Sforzi per un carico loc<strong>al</strong>izzato ad una <strong>di</strong>stanza h d<strong>al</strong> bordo <strong>del</strong>Pyh45°45°xhσ* xhFigura 3.15: C<strong>al</strong>colo approssimato degli sforzi <strong>di</strong> contatto σ ∗ x ad una <strong>di</strong>stanza hd<strong>al</strong> bordo <strong>del</strong> semipiano [6].65
3.4 EserciziEsercizio 3.1 Consideriamo a contatto due corpi rugosi (rugosità con una lunghezzad’onda L = 20 [µm]): immaginiamo che la pressione <strong>di</strong> contatto p che si scambiano idue corpi sia descrivibile come sovrapposizione <strong>di</strong> una componente costante più unacomponente sinusoid<strong>al</strong>e. A qu<strong>al</strong>e profon<strong>di</strong>tà d<strong>al</strong>la superficie non si risente più <strong>del</strong>la<strong>di</strong>stribuzione non uniforme <strong>del</strong>la pressione ?Esercizio 3.2 Data una membrana forata soggetta <strong>al</strong>lo stato <strong>di</strong> sforzo (espresso inMPa) (<strong>10</strong>0, 60, 50). C<strong>al</strong>colare: i) l’andamento <strong>del</strong>lo sforzo σ θ sul bordo <strong>del</strong> foro; ii) iv<strong>al</strong>ori massimi e minimi <strong>del</strong>lo sforzo σ θ ; iii) le <strong>di</strong>rezioni per le qu<strong>al</strong>i σ θ è massimo cosarappresentano per il tensore [σ ij] <strong>del</strong>lo stato <strong>di</strong> sforzo remoto ?Esercizio 3.3 Data una membrana forata soggetta <strong>al</strong>lo stato <strong>di</strong> sforzo generico (S x, S y, 0)ricavare un’espressione an<strong>al</strong>itica <strong>del</strong>la concentrazione <strong>di</strong> sforzo nei punti A e B (vedasiFig.3.9) <strong>al</strong> variare <strong>del</strong>la biassi<strong>al</strong>ità λ = S x/S y.Esercizio 3.4 Risolvere lo stesso caso <strong>di</strong> Es.3.2 tramite la soluzione <strong>del</strong>l’esercizioprecedente.66
Capitolo 4Intagli e concentrazione <strong>di</strong>sforzoSi riprendono <strong>al</strong>la luce <strong>del</strong> Cap. 2 i concetti <strong>di</strong> coefficiente d’intaglio, già esposti nelCorso <strong>di</strong> <strong>Costruzione</strong> <strong>di</strong> Macchine 1, illustrando il concetto <strong>di</strong> ellisse equiv<strong>al</strong>ente e comesi possano applicare a problemi re<strong>al</strong>i i dati/grafici dei coefficienti d’intaglio <strong>di</strong>sponibili inletteratura per geometrie semplificate 1 .4.1 Concentrazione <strong>di</strong> sforzo nella membrana forataNel Cap. 2 abbiamo visto come la concentrazione <strong>di</strong> sforzo <strong>al</strong> bordo <strong>di</strong> un foroin una membrana indefinita sia caratterizzato da una una concentrazione <strong>di</strong>sforzo con σ θ,max = 3 · S per θ = ±π/2 (dove S è lo sforzo remoto applicato).Richiamando il concetto <strong>di</strong> coefficiente d’intaglio:K t = σ maxσ nom(4.1)si ricava che il coefficiente d’intaglio per un foro in una lastra indefinita (ovverouna lastra molto più grande <strong>del</strong>le <strong>di</strong>mensioni <strong>del</strong> foro) è K t = 3.Se consideriamo una applicazione re<strong>al</strong>e in cui una lastra <strong>di</strong> <strong>di</strong>mensioni finiteè soggetta ad uno sforzo assi<strong>al</strong>e σ, si può vedere come il coefficiente d’intaglio<strong>di</strong>minuisca <strong>al</strong> variare <strong>del</strong> rapporto d/H (Fig. 4.1) partendo da un v<strong>al</strong>ore 3 perd/H = 0 (quando d → 0 il foro è infinitesimo rispetto <strong>al</strong>le <strong>di</strong>mensioni <strong>del</strong>la lastratorniamo <strong>al</strong> caso visto nel capitolo precedente). La ragione <strong>di</strong> t<strong>al</strong>e variazioneè che, pensando <strong>al</strong>l’an<strong>al</strong>ogia idro<strong>di</strong>namica già vista nel <strong>corso</strong> <strong>di</strong> <strong>Costruzione</strong> <strong>di</strong>Macchine 1 [4], il flusso degli sforzi intorno <strong>al</strong> foro <strong>di</strong>minuisce <strong>al</strong>l’aumentare <strong>del</strong>le<strong>di</strong>mensioni <strong>del</strong>lo stesso. In particolare riferendosi <strong>al</strong>la sezione nomin<strong>al</strong>e minima1 a cura <strong>di</strong> S. Beretta67
Figura 4.1: Coefficiente d’intaglio in una membrana forata <strong>di</strong> <strong>di</strong>mensioni finite [7].<strong>del</strong>la lastra:σ nom =σ(4.2)H − ded il coefficiente d’intaglio K t può essere approssimato con la formula [7] (ottenutacome interpolazione <strong>di</strong> risultati speriment<strong>al</strong>i):(K t = 2 + 1 − d ) 3(4.3)HSe il coefficiente d’intaglio viene invece riferito <strong>al</strong>la sezione lorda - K t,g - la concentrazione<strong>di</strong> sforzo tende invece a s<strong>al</strong>ire, perché <strong>al</strong>l’aumentare <strong>del</strong>le <strong>di</strong>mensioni<strong>del</strong> foro si riduce sempre <strong>di</strong> più la sezione minima e lo sforzo nomin<strong>al</strong>e tende a<strong>di</strong>nn<strong>al</strong>zarsi rispetto <strong>al</strong>lo sforzo remoto σ. In particolare:K t,g =K t(1 − d/H)(4.4)L’effetto <strong>del</strong>la superficie libera su K t,g è simile a quello che si ritroverà sul fattore<strong>di</strong> forma per esprimere il SIF <strong>al</strong>l’apice <strong>del</strong>le fratture.68
4.2 Membrana con foro ellitticoNel caso <strong>di</strong> una membrana <strong>di</strong> <strong>di</strong>mensioni indefinite contenente un foro ellittico<strong>di</strong> semiassi a, b e soggetta ad uno sforzo remoto σ (in <strong>di</strong>rezione y), lo stato <strong>di</strong>sforzo può essere espresso in <strong>di</strong>verse formulazioni abbastanza complicate. Quelloche qui ci interessa annotare è che lo sforzo tangente <strong>al</strong> foro in A risulta:σ A =(1 + 2a b)· σ (4.5)mentre quello in B risulta σ B = −σ (come nel foro circolare) in<strong>di</strong>pendentemented<strong>al</strong> rapporto a/b. Il coefficiente d’intaglio per un foro ellittico è quin<strong>di</strong>:K t = 1 + 2a b(4.6)che può <strong>al</strong>tresì essere riscritta come:√ tK t = 1 + 2ρ(4.7)dove t = a è la semilarghezza <strong>del</strong>la cavità e ρ è il raggio <strong>di</strong> curvatura in A (perun ellisse ρ = b 2 /a).Figura 4.2: Membrana con foro ellittico [7].Esempio 4.1 Si consideri una membrana indefinita soggetta ad uno sforzo <strong>di</strong> <strong>10</strong>0[MPa] contenente un foro ellittico <strong>del</strong>le <strong>di</strong>mensioni 20, <strong>10</strong> [mm]: v<strong>al</strong>utare la concentrazione<strong>di</strong> sforzo <strong>al</strong> variare <strong>del</strong>la giacitura <strong>del</strong>la cavità (asse maggiore orizzont<strong>al</strong>e o69
vertic<strong>al</strong>e).Consideriamo dapprima l’asse <strong>del</strong> foro orizzont<strong>al</strong>e: in t<strong>al</strong> caso 2a = 20 [mm] e 2b = <strong>10</strong>[mm]: per la Eq.(4.6) risulta K t = 5. Al semiasse maggiore è presente uno sforzoσ A = 500 [MPa] ed <strong>al</strong> semiasse minore uno sforzo σ B = −<strong>10</strong>0 [MPa].Nell’<strong>al</strong>tra giacitura <strong>del</strong>l’ellisse K t = 2: lo sforzo massimo sulla periferia <strong>del</strong> foro èpari a 200 [MPa].La Eq. (4.7) mostra come per ρ → 0 (come nel caso <strong>di</strong> una cavità ellittica chesi assottiglia fino a <strong>di</strong>ventare una frattura) lo stato <strong>di</strong> sforzo <strong>di</strong>venti singolarecon σ A → ∞. Nel caso <strong>di</strong> fratture abbandoneremo il K t ed an<strong>al</strong>izzeremo lostato <strong>di</strong> sforzo (per eseguire le verifiche <strong>di</strong> resistenza) sulla base <strong>del</strong> SIF (StressIntensity Factor), un parametro che descrive l’intensità <strong>del</strong> campo <strong>di</strong> sforzosingolare <strong>al</strong>l’apice <strong>del</strong>la frattura.4.3 Determinazione <strong>del</strong>lo stato <strong>di</strong> sforzo in organi<strong>di</strong> macchina4.3.1 Ellisse equiv<strong>al</strong>enteLa determinazione esatta <strong>del</strong>lo stato <strong>di</strong> sforzo indotto da intagli <strong>di</strong> varia formapresenti negli organi <strong>di</strong> macchina va fatta sulla base <strong>di</strong> geometrie (più o menosemplificate) presenti nei manu<strong>al</strong>i oppure attraverso an<strong>al</strong>isi numeriche.Tuttavia è possibile in molti casi ricavare in<strong>di</strong>cazioni <strong>di</strong> prima approssimazione,per<strong>al</strong>tro in molti casi vicine <strong>al</strong> vero, senza bisogno <strong>di</strong> an<strong>al</strong>isi complicateadottando il concetto <strong>di</strong> ellisse equiv<strong>al</strong>ente.!8!" 8 $!!9!%$"!" ) $)!#$"!:#!!!#$%&'&'(!)**+$,-.$/0!/1!.23!,/0,3*.!/1!345$6-+30.!3++$*73!Figura 4.3: Foro <strong>di</strong> forma romboid<strong>al</strong>e [8].70
Consideriamo ad esempio il caso <strong>del</strong>la cavità romboid<strong>al</strong>e <strong>di</strong> Fig. 4.3 in unamembrana soggetta <strong>al</strong>lo sforzo remoto σ. Per stimare il coefficiente d’intaglionel punto A immaginiamo un’ellisse che abbia la stessa larghezza <strong>del</strong>la cavitàed lo stesso raggio <strong>di</strong> raccordo ρ A . Il coefficiente d’intaglio può essere stimatocome:√ aK t,A = 1 + 2ρ A!!""!#$%&'&'(!!)**+$,-"$./!.0!"12!,./,2*"!.0!234$5-+2/"!2++$*62!Figura 4.4: Intaglio sul bordo <strong>di</strong> una membrana [8].Consideriamo ora un intaglio a V sul bordo <strong>di</strong> una membrana: anche in questocaso si può adottare il concetto <strong>di</strong> ellisse equiv<strong>al</strong>ente, immaginando un’ellisseche approssima la forma sulla base <strong>del</strong>la profon<strong>di</strong>tà e <strong>del</strong> raggio <strong>di</strong> raccordo <strong>al</strong>fondo <strong>del</strong>l’intaglio. In particolare risulta d<strong>al</strong>la Eq.(4.7):!√ tK t = 1 + 2ρEsempio 4.2 Si consideri un intaglio semicircolare sul bordo <strong>di</strong> una membra: stimareil coefficiente d’intaglio.Adottando in questo caso la Eq.(4.7) risulta: K t,A∼ = 3. Il v<strong>al</strong>ore vero <strong>del</strong> coefficiented’intaglio è K t = 3.06 [7]. La ragione per cui questa concentrazione <strong>di</strong> sforzo è moltoσAσFigura 4.5: Intaglio semicircolare.71
simile a quella <strong>di</strong> un foro è che nell’intaglio semicircolare sul bordo manca, rispetto<strong>al</strong>la membrana forata, la presenza degli sforzi σ θ : il loro effetto è modesto in A giacchéhanno una risultante nulla (lo stesso v<strong>al</strong>e per una cavità semi-ellittica).Esempio 4.3 Si consideri un foro tangente <strong>al</strong> bordo <strong>di</strong> una membrana semi-infinitasoggetta ad un sforzo remoto σ (questo semplice caso schematizza una inclusione o<strong>di</strong>fetto appena sotto la superficie <strong>di</strong> un pezzo): stimare il coefficiente d’intaglio nelpunto A.σA2rσFigura 4.6: Foro <strong>al</strong> bordo <strong>di</strong> una membrana semi-infinita.In questo caso applicando ancora la Eq.(4.7) risulta: K t,A∼ = 3.828, molto vicino <strong>al</strong>v<strong>al</strong>ore esatto K t = 4 [7].4.3.2 Intagli multipliNel caso <strong>di</strong> due o più intagli presenti in una stessa posizione ci troviamo inpresenza <strong>di</strong> una concentrazione multiple <strong>di</strong> sforzo. Un esempio è quello <strong>del</strong>laFig. 4.7 in cui sul bordo <strong>di</strong> un foro è ricavato un piccolo intaglio semicircolare.Figura 4.7: Intagli multipli [7]: a) piccolo intaglio semicircolare <strong>al</strong> bordo <strong>di</strong> un foro;b) schematizzazione <strong>del</strong>l’intaglio.72
In casi come questo in cui le <strong>di</strong>mensioni geometriche <strong>di</strong> un intaglio sono moltominori <strong>di</strong> quelle <strong>del</strong>l’<strong>al</strong>tro si può ragionare in questo modo:• lo stato <strong>di</strong> sforzo indotto d<strong>al</strong> foro è K t1 = 3;• lo stato <strong>di</strong> sforzo indotto d<strong>al</strong> piccolo intaglio semicircolare non è in grado<strong>di</strong> perturbare la <strong>di</strong>stribuzione <strong>di</strong> sforzo intorno <strong>al</strong> foro grande e <strong>di</strong>conseguenza l’intaglio è investito da uno sforzo pari a K t1 · σ;• l’intaglio è approssimabile <strong>al</strong>l’intaglio semicircolare <strong>al</strong> bordo <strong>di</strong> una membranasemi-infinita e caratterizzato da K t2 = 3.06.In conseguenza dei punti precedenti la concentrazione <strong>di</strong> sforzo <strong>al</strong> bordo <strong>del</strong>l’intagliorisulta:K t1,2 = K t1 · K t2 = 9.18Un <strong>al</strong>tro caso simile è quello <strong>di</strong> un foro <strong>al</strong> fondo <strong>di</strong> uno sp<strong>al</strong>lamento o la gola <strong>di</strong>un <strong>al</strong>bero: considerando un <strong>al</strong>bero con un foro piccolo <strong>al</strong> fondo <strong>di</strong> una gola (comesi verifica per i fori <strong>di</strong> lubrificazione in <strong>al</strong>beri motore) soggetto a torsione, dettoK t,tors il coefficiente d’intaglio a torsione <strong>del</strong>l’<strong>al</strong>bero, <strong>al</strong> bordo <strong>del</strong> foro si ha K t =4·K t,tors . Nel caso invece <strong>di</strong> intagli <strong>di</strong> <strong>di</strong>mensioni simili le considerazioni sempliciFigura 4.8: Intagli multipli [7]: <strong>al</strong>bero con un foro piccolo <strong>al</strong> fondo <strong>di</strong> una gola incui il K t è ricavabile tramite moltiplicazione dei coefficienti d’intaglio.sopraesposte non possono essere applicate (Fig. 4.9(a)): la concentrazione <strong>di</strong>sforzo può essere stimata sulla base <strong>del</strong> concetto <strong>di</strong> ellisse equiv<strong>al</strong>ente. Unsimile concetto si può applicare anche <strong>al</strong> caso <strong>di</strong> gole negli <strong>al</strong>beri (Fig. 4.9(b)),scegliendo geometrie sostitutive (intagli a U o iperbolici) con la stessa profon<strong>di</strong>tàe raggio <strong>al</strong> fondo.4.3.3 Sovrapposizione degli effettiNel caso un pezzo sia soggetto a <strong>di</strong>versi carichi, lo stato <strong>di</strong> sforzo <strong>al</strong> fondo degliintagli si ottiene come semplice sovrapposizione degli effetti. In particolare,73
(a)(b)Figura 4.9: Intagli multipli costituiti da geometrie <strong>di</strong> <strong>di</strong>mensione simile non risolvibilicon la moltiplicazione dei coefficienti d’intaglio: a) foro con intagli ellittici; b)<strong>al</strong>bero con gola doppia.Figura 4.<strong>10</strong>: Sovrapposizione <strong>di</strong> carichi su un elemento intagliato.74
considerando una membrana sottile cui siano applicati un carico assi<strong>al</strong>e ed unacoppia flettente, detti:σ max,1 = K t,1 · σ nom,1σ max,2 = K t,2 · σ nom,2gli sforzi massimi dovuti rispettivamente a P ed M, lo sforzo <strong>al</strong> fondo <strong>del</strong>l’intagliorisulta:σ max = σ max,1 + σ max,2 = K t,1 · σ nom,1 + K t,2 · σ nom,2 (4.8)Nel caso <strong>di</strong> componenti soggetti a carichi che provocano componenti sforzo <strong>di</strong>verse<strong>al</strong> fondo <strong>di</strong> un intaglio, come nel caso <strong>di</strong> un <strong>al</strong>bero soggetto a carichi cheinducono sforzi norm<strong>al</strong>i (azione assi<strong>al</strong>e P e coppia flettente M) e sforzi <strong>di</strong> taglio(una coppia torcente T ), si sovrappongono gli effetti e si ricorre quin<strong>di</strong> ad unopportuno criterio <strong>di</strong> ce<strong>di</strong>mento (statico o fatica) per lo stato <strong>di</strong> sforzo compostocome mostrato nel successivo esempio.Esempio 4.4 Si consideri una gola semicircolare <strong>di</strong> raggio r = 2 [mm] in un <strong>al</strong>bero<strong>del</strong> <strong>di</strong>ametro D = 50 [mm] soggetto ai seguenti carichi: P = 40 [kN], M = <strong>10</strong>00 [Nm],T = 500 [Nm]. C<strong>al</strong>colare lo sforzo equiv<strong>al</strong>ente (criterio <strong>del</strong>la τ ottaedr<strong>al</strong>e) <strong>al</strong> fondo<strong>del</strong>l’intaglio.Figura 4.11: Sovrapposizione <strong>di</strong> carichi su un <strong>al</strong>bero con una gola semicircolare.Per effetto <strong>del</strong>l’azione assi<strong>al</strong>e (K t = 2.70) lo sforzo massimo è σ max,P = 38.18 [MPa]e per effetto <strong>del</strong> momento flettente (K t = 2.45) lo sforzo massimo σ max,M = 225.65[MPa]: lo sforzo norm<strong>al</strong>e massimo <strong>al</strong> fondo <strong>del</strong>la gola è quin<strong>di</strong> σ max = 263.83 [MPa].Lo sforzo tangenzi<strong>al</strong>e massimo (K t = 1.75) è τ max = 40.28 [MPa].Essendo in prima approssimazione uno stato <strong>di</strong> sforzo piano (trascurando le componenticirconferenzi<strong>al</strong>i <strong>del</strong>lo sforzo norm<strong>al</strong>e) la sollecitazione <strong>di</strong> confronto si c<strong>al</strong>colacome:σ∗ = √ σ 2 max + 3 · τ 2 max = 272.89 [MPa]75
Capitolo 5Problemi assi<strong>al</strong>simmetriciSi considera una classe particolare <strong>di</strong> problemi assi<strong>al</strong>simmetrici, molto comuni nelle applicazionimeccaniche. A questa classe <strong>di</strong> problemi appartengono <strong>di</strong>schi e cilindri soggetti apressioni ra<strong>di</strong><strong>al</strong>i e a effetti <strong>di</strong> forze centrifughe dovute a rotazione con velocità angolare ωcostante 1 .5.1 Problema termoelastico lineareSi considerano una classe particolare <strong>di</strong> problemi assi<strong>al</strong>simmetrici in cui le con<strong>di</strong>zioni<strong>di</strong> carico, gli sforzi e le deformazioni <strong>di</strong>pendono solo d<strong>al</strong>la coor<strong>di</strong>natara<strong>di</strong><strong>al</strong>e r. Sia per gli effetti elastici sia per gli effetti termici si fa l’ipotesi cheil mezzo sia isotropo. Le componenti <strong>del</strong> generico stato <strong>di</strong> sforzo sono σ r , σ θ ,σ z , funzioni solo <strong>del</strong>la coor<strong>di</strong>nata ra<strong>di</strong><strong>al</strong>e r, come in<strong>di</strong>cato nella Fig. 5.1(a) eτ r,θ = τ r,z = τ θ,z = 0. Quin<strong>di</strong> σ r , σ θ , σ z sono sforzi princip<strong>al</strong>i. Su un elementinoYdθσ rrdrσ θF rXσ θσ r + dσ r(a)(b)Figura 5.1: Problemi assi<strong>al</strong>simmetrici: a) stato <strong>di</strong> sforzo; b) equilibrio ra<strong>di</strong><strong>al</strong>eelemento.1 a cura <strong>di</strong> A. Loconte e S. Beretta76
isolato in coor<strong>di</strong>nate cilindriche agisce, oltre agli sforzi <strong>di</strong> superficie, anche laforza <strong>di</strong> massa per unità <strong>di</strong> volume F r .Scrivendo la con<strong>di</strong>zione <strong>di</strong> equilibrio in <strong>di</strong>rezione ra<strong>di</strong><strong>al</strong>e (l’unica non identicamentesod<strong>di</strong>sfatta) si ha:−σ r·rdθdz+(σ r +dr)·(r+dr)·dθdz−2σ θ drsin dθ2 ·dz+F R(r + dr )·dθdrdz = 02(5.1)Sviluppando e trascurando gli infinitesimi <strong>di</strong> or<strong>di</strong>ne superiore <strong>al</strong> terzo e <strong>di</strong>videndoper dz dθ si ricava:σ r dr + dσ r r − σ θ dr + F R rdr = 0σ r + dσ rdr r − σ θ + F R r = 0Infine l’equazione <strong>di</strong> equilibrio in <strong>di</strong>rezione ra<strong>di</strong><strong>al</strong>e si scrive:ddr (σ rr) − σ θ + F R r = 0 (5.2)Una porzione <strong>di</strong> materi<strong>al</strong>e (come nella Fig. 5.1(a)(a)) sottesa d<strong>al</strong>l’angolo dθpuò solo muoversi in <strong>di</strong>rezione ra<strong>di</strong><strong>al</strong>e con uno spostamento u. Considerando lecomponenti <strong>di</strong> deformazioni <strong>di</strong> t<strong>al</strong>e caso, nell’esempio 2.1 avevamo ottenuto leEq. (2.1):ɛ r = du ɛ θ = u dr rche possiamo combinare in:d(ɛ θ r)drper ottenere l’equazione <strong>di</strong> congruenza:= dudr = ɛ rd(ɛ θ r)− ɛ r = 0 (5.3)drAlla equazione <strong>di</strong> congruenza si devono aggiungere le con<strong>di</strong>zioni <strong>al</strong> contorno ela legge costitutiva <strong>del</strong> materi<strong>al</strong>e così espressa d<strong>al</strong>le relazioni termoelastiche:ɛ r = 1 E [σ r − ν (σ θ + σ z )] + α T (r)ɛ θ = 1 E [σ θ − ν (σ r + σ z )] + α T (r)(5.4)ɛ z = 1 E [σ z − ν (σ r + σ θ )] + α T (r)Si introduce a questo punto la funzione <strong>di</strong> sforzo Φ ′ (r) che <strong>di</strong>venta l’incognita<strong>del</strong> problema, essa rende identicamente sod<strong>di</strong>sfatta l’equazione <strong>di</strong> equilibrio. Inquesto caso si pone:σ r r = Φ ′σ θ = dΦ′dr + F R r77(5.5)
La funzione Φ ′ si determina me<strong>di</strong>ante l’equazione <strong>di</strong> congruenza espressa intermini <strong>di</strong> sforzo attraverso la legge costitutiva. Considerando quanto già vistonel Cap. 4, si può <strong>di</strong>re che la funzione Φ ′ è la derivata <strong>del</strong> potenzi<strong>al</strong>e <strong>di</strong> Airy.5.2 Dischi sottiliSi trattano <strong>di</strong>schi omogenei, isotropi, <strong>di</strong> spessore costante infinitesimo, rotantiattorno <strong>al</strong>l’asse princip<strong>al</strong>e d’inerzia z e sottoposti a pressioni sui contorni internoed esterno, come mostra la Fig. 5.2.In ogni punto <strong>del</strong> <strong>di</strong>sco si ha:σ z = τ rz = τ θz = 0 (5.6)In<strong>di</strong>cando con ρ la densità <strong>del</strong> materi<strong>al</strong>e, la forza <strong>di</strong> massa per unità <strong>di</strong> volumeèF r = ρ ω 2 r (5.7)e le relazioni termoelastiche sono:ɛ r = 1 E (σ r − νσ θ ) + α T (r)ɛ θ = 1 E (σ θ − νσ r ) + α T (r)ɛ z = − ν E (σ r − νσ θ ) + α T (r)(5.8)dove α è il coefficiente <strong>di</strong> <strong>di</strong>latazione lineare <strong>del</strong> materi<strong>al</strong>e e T (r) è la temperatura(variabile lungo il raggio). Esprimendo le componenti <strong>di</strong> deformazioneωp ip eFigura 5.2: Disco sottile e relative con<strong>di</strong>zioni <strong>al</strong> contorno.78
in funzione degli sforzi ed introducendole nell’equazione <strong>di</strong> congruenza (5.3) siottiene:rEddr (σ θ − νσ r ) + α r d dr T (r) + 1 E (σ θ − νσ r ) − 1 E (σ r − νσ θ ) = 0σ θ − νσ r − σ r + νσ θ + r dσ rdr − r ν dσ rdr + α E r dTdr = 0Introducendo gli sforzi, espressi attraverso la funzione <strong>di</strong> sforzo Φ ′ , si har 2 d2 (Φ ′ )dr 2 + r d(Φ′ )− Φ ′ = −ρω 2 r 3 (3 + ν) − αEr 2 dTdrdrche è un’equazione <strong>di</strong>fferenzi<strong>al</strong>e lineare completa <strong>di</strong> Eulero.<strong>del</strong>l’integr<strong>al</strong>e gener<strong>al</strong>e <strong>del</strong>l’omogenea associata si pone:(Φ ′ ) ′ = r λ(5.9)Per la ricercada cui:Sostituendo si ottiene:d(Φ ′ ) ′drd 2 (Φ ′ ) ′dr 2= λr λ−1= λ (λ − 1) r λ−2r 2 λ (λ − 1) r λ−2 + r λ r λ−1 − r λ = 0 → r λ [λ (λ − 1) + λ − 1] = 0 (5.<strong>10</strong>)che dovendo v<strong>al</strong>ere per ogni r esige cheλ 1 = 1 λ 2 = −1 (5.11)e la soluzione <strong>del</strong>l’omogenea associata è:L’integr<strong>al</strong>e particolare è:(Φ ′ ) ′ = C 1 r λ1 + C 2 r λ2 = C 1 r + C 2r(5.12)(Φ ′ ) ′′ = − 3 + ν ρω 2 r 3 − α E 1 8re quin<strong>di</strong> l’integr<strong>al</strong>e gener<strong>al</strong>e risulta:∫ rΦ ′ = (Φ ′ ) ′ + (Φ ′ ) ′′ = C 1 r + C 2r − 3 + ν ρω 2 r 3 − α E 1 8rkT r dr (5.13)∫ rkT r dr (5.14)in cui C 1 e C 2 sono costanti da determinare imponendo le con<strong>di</strong>zioni <strong>al</strong> contorno.Si vede la sovrapposizione degli effetti dovuti <strong>al</strong>la rotazione (terzo addendo) e<strong>al</strong>la <strong>di</strong>stribuzione <strong>del</strong>la temperatura (quarto addendo).79
Ricordando il legame tra la Φ ′ e gli sforzi definito me<strong>di</strong>ante la funzione <strong>del</strong> Airy,si ricava infineσ r = Φ′r = C 1 + C 2r 2 − 3 + ν ρ − α E 1 ∫ r8 r 2 T r dr (5.15)σ θ = dFdr + Rr = C 1 − C 2r 2 − 1 + 3ν ρ + α E 1 ∫ r8r 2 T r dr − α E T (5.16)Se T (r) = costante, gli integr<strong>al</strong>i si spezzano nella somma <strong>di</strong> un termine costantee <strong>di</strong> uno in r −2 che si conglobano in C 1 e in C 2 . Solo se la temperatura non èuniforme ci sono sforzi termici.5.2.1 Disco con sole pressioni sui contorniDisco pienoLa soluzione gener<strong>al</strong>e si riduce a quella <strong>del</strong> Lamé (citato in [9]).per cui:σ r = C 1 + C 2r 2σ θ = C 1 − C 2r 2kσ r + σ θ = 2 C 1 (5.17)Il <strong>di</strong>sco si deforma in modo che le superficie later<strong>al</strong>i rimangono piane e par<strong>al</strong>leleinfatti:ɛ r = 1 E (σ r − νσ θ )ɛ θ = 1 E (σ θ − νσ r )(5.18)ɛ z = − ν E (σ θ + σ r ) = − 2νC 1E = costanteQuesta con<strong>di</strong>zione, superficie later<strong>al</strong>i che rimangono piane durante la deformazione,per simmetria deve essere verificata anche per un concio infinitesimo <strong>di</strong>un cilindro infinitamente lungo (paragrafo ??) quin<strong>di</strong> per l’unicità <strong>del</strong>la soluzione<strong>del</strong> problema elastico, la soluzione <strong>del</strong> Lamé, qui data per i <strong>di</strong>schi, è anchesoluzione <strong>del</strong> problema dei cilindri infinitamente lunghi, pieni o cavi, con solepressioni sui contorni.Se il <strong>di</strong>sco non ha un foro centr<strong>al</strong>e deve essere C 2 = 0 affinché, per r → 0, glisforzi non tendano <strong>al</strong>l’infinito e quin<strong>di</strong> 2 :σ r = C 1 σ θ = C 12 Si poteva anche arrivare <strong>al</strong>la stessa conclusione considerando che per r = 0 deve essereσ r = σ θ .k80
p ep ep ep ep eFigura 5.3: Stato <strong>di</strong> sforzo in un <strong>di</strong>sco sottile soggetto a pressione esterna p e .La costante C 1 si determina quin<strong>di</strong> imponendo l’unica con<strong>di</strong>zione sul contornoesterno:σ r = −p e per r = r edove il segno − deriva d<strong>al</strong>l’aver assunto positivi gli sforzi <strong>di</strong> trazione.dunque in ogni punto <strong>del</strong> <strong>di</strong>sco:Si haσ r = −p eσ θ = −p e(5.19)con uno stato <strong>di</strong> sforzo piano idrostatico (nel piano) come in<strong>di</strong>cato nella figura5.3.Disco foratoNel caso in cui il <strong>di</strong>sco sia forato è necessario scrivere le con<strong>di</strong>zioni sia sulcontorno interno sia su quello esterno:Si ricavaσ r = −p i per r = r i − p i = C 1 + C 2r 2σ r = −p e per r = r e − p e = C 1 + C 2r 2C 1 = p ir 2 i − p er 2 er 2 e − r 2 iC 2 = (p e − p i ) r 2 i r2 er 2 e − r 2 i(5.20)81
2σ r/p i1.5σ θ/p iσ/p i<strong>10</strong>.5a=3a=2.5a=20−0.5a=3a=2.5 a=2−<strong>10</strong> 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1(r−r i)/(r e−r i)Figura 5.4: Andamento <strong>di</strong> σ r e σ θ per pressione interna p i e <strong>di</strong>versi v<strong>al</strong>ori <strong>di</strong> a.e quin<strong>di</strong> l’espressione degli sforzi è la seguente:σ r = p ir 2 i − p er 2 er 2 e − r 2 iσ θ = p ir 2 i − p er 2 er 2 e − r 2 i+ (p e − p i ) r 2 i r2 er 2 e − r 2 i− (p e − p i ) r 2 i r2 er 2 e − r 2 i1r 2(5.21)1r 2Nel caso <strong>di</strong> sola pressione esterna (p i = 0), in<strong>di</strong>cando con a = r er i, si ha:σ r = p ea 2a 2 − 1σ θ = p ea 2a 2 − 1( ) r2ir 2 − 1 ( )− r2 ir 2 − 1ovunque <strong>di</strong> compressioneovunque <strong>di</strong> compressione(5.22)All’intradosso dove si ha il massimo v<strong>al</strong>ore assoluto <strong>di</strong> σ θ èσ r = 0 e σ θ = −p e2 a 2a 2 − 1(5.23)e nel caso <strong>di</strong> foro molto piccolo (r i → 0 rispetto <strong>al</strong>le <strong>di</strong>mensioni esterne <strong>del</strong><strong>di</strong>sco) si ha 3 :limr i→0 σ θ = −2 p e3 Allo stesso risultato si può arrivare considerando le (5.19) ed il coefficiente d’intaglio perun foro in una lastra soggetta a stato <strong>di</strong> sforzo biassi<strong>al</strong>e (crf. Cap.2).82
All’estradosso si ha:σ r = −p e e σ r = −p ea 2 + 1a 2 − 1(5.24)Si osserva che |σ θ | è sempre maggiore <strong>di</strong> p e e tende a p e per r e → ∞. Va ancheannotato come i v<strong>al</strong>ori degli sforzi non <strong>di</strong>pendono d<strong>al</strong>le <strong>di</strong>mensioni assolute <strong>del</strong><strong>di</strong>sco ma d<strong>al</strong> rapporto a = r e /r i .Nel caso <strong>del</strong>la sola pressione interna (Fig. 5.4) con p e = 0 si ha:σ r =σ θ =p ia 2 − 1p ia 2 − 1(1 − a2 ri2 )r 2(1 + a2 ri2 )r 2All’intradosso dove σ θ è massima si ha:σ r = −p iovunque <strong>di</strong> compressioneovunque <strong>di</strong> trazioneσ θ = p ia 2 + 1a 2 − 1 > p i(5.25)(5.26)In questo caso la σ θ è sempre maggiore <strong>di</strong> p i e tende a p i per r e → ∞ o perr i → 0. All’estradosso si haσ r = 0σ θ = 2 · p ia 2 − 1Esempio 5.1 Si consideri un <strong>di</strong>sco in re<strong>al</strong>izzato in Fe5<strong>10</strong> avente <strong>di</strong>ametro esternopari a 30 mm e forzato su un <strong>al</strong>bero <strong>di</strong> <strong>di</strong>ametro <strong>10</strong> mm. Si c<strong>al</strong>coli il v<strong>al</strong>ore massimo<strong>del</strong>la pressione che, per effetto <strong>del</strong> forzamento, si può ammettere sul <strong>di</strong>ametro internoaffinché il coefficiente <strong>di</strong> sicurezza rispetto <strong>al</strong>lo snervamento sia pari a 1.2.Il punto più sollecitato si ha <strong>al</strong>l’intradosso dove:σ r = −p i e σ θ = p ia 2 + 1a 2 − 1In<strong>di</strong>cando con σ ∗ lo sforzo <strong>di</strong> confronto <strong>di</strong> Guest-Tresca, essendo σ z = 0, si ha:(5.27)σ ∗ a 2 + 1= σ θ − σ r = p i +a 2 pi (5.28)− 1Assumendo per il materi<strong>al</strong>e Fe5<strong>10</strong> lo sforzo <strong>di</strong> snervamento pari a 355 MPa ed essendoa = r e/r i = 3, si può scrivere:σ ∗ = p i ( 32 + 1 355+ 1) =3 2 − 1 1.2da cui p i,max = 132 MPa, σ r=-132 MPa, σ θ = 165 MPa e σ ∗ = 297 MPa.(5.29)83
5.2.2 Disco rotante a ω costanteLe espressioni degli sforzi sono:e la <strong>di</strong>latazione lungo z è:σ r = C 1 + C 2r 2 − 3 + ν ρω 2 r 28σ θ = C 1 − C 2rp2 − 1 + 3ν ρω 2 r 28ɛ z = − ν E (σ r + σ θ ) = − ν E(2C 1 − ρω 2 r 2 1 + ν )2che mostra come le superficie later<strong>al</strong>i non restino piane; C 1 e C 2 si determinanoimponendo le con<strong>di</strong>zioni <strong>al</strong> contorno.Disco pienoNel caso <strong>del</strong> <strong>di</strong>sco pieno, se la superficie esterna è scarica, si ha:σ r = σ θ per r = 0σ r = 0 per r = r ee si ottiene:C 1 = 3 + ν ρω 2 r 2 C 2 = 08Con questi v<strong>al</strong>ori <strong>del</strong>le costanti le espressioni degli sforzi <strong>di</strong>ventano:σ r = 3 + ν8σ θ = 3 + ν8ρ ω 2 (r 2 e − r 2 )ρ ω 2 r 2 e − 1 + 3ν8Al centro <strong>del</strong> <strong>di</strong>sco, per r = 0, èovunque <strong>di</strong> trazioneρ ω 2 r 2ovunque <strong>di</strong> trazione(5.30)σ r = σ θ = 3 + ν8ρ ω 2 r 2 ee nel caso <strong>di</strong> ν = 0.3: σ r = σ θ = 0.412 ρ ω 2 r 2 e.Alla periferia <strong>del</strong> <strong>di</strong>sco, per r = r e , si ottiene:σ r = 0σ θ = 1 − ν4ρ ω 2 r 2 eLa deformazione assi<strong>al</strong>e ɛ z risulta variabile con r:ɛ z = − ν E ρ ω2 ( 3 + ν4r 2 e − 1 + ν2r 2 )84
σ/(ρ ω 2 r e2 )0.5σ r/(ρ ω 2 2r e )0.4σ θ/(ρ ω 2 2r e )0.30.20.<strong>10</strong>0 0.2 0.4 0.6 0.8 1(a)(b)Figura 5.5: Disco rotante a ω costante: a) stato <strong>di</strong> sforzo; b) deformata qu<strong>al</strong>itativa<strong>del</strong> <strong>di</strong>sco.L’andamento degli sforzi è mostrato nella Fig. 5.5(a). La deformata qu<strong>al</strong>itativa<strong>del</strong> <strong>di</strong>sco è mostrata in Fig. 5.5(b): si può imme<strong>di</strong>atamente notare come lasoluzione dei <strong>di</strong>schi rotanti non possa essere v<strong>al</strong>ida anche per i cilindri in quantoɛ z varia ra<strong>di</strong><strong>al</strong>mente. Nel cilindro rotante dovrà quin<strong>di</strong> nascere una σ z (variabilelungo il raggio) t<strong>al</strong>e da rendere ɛ z = cost.Esempio 5.2 Si consideri un <strong>di</strong>sco pieno in acciao (ρ = 7800kg/m 3 ) rotante con velocitàperiferica v p = <strong>10</strong>0 m/s. Assumendo r e =1 m (ω=<strong>10</strong>0 rad/s), e lo spessore <strong>del</strong><strong>di</strong>sco (s) pari a 20 mm, si c<strong>al</strong>coli lo stato <strong>di</strong> sforzo <strong>al</strong> centro <strong>del</strong> <strong>di</strong>sco e la massimariduzione <strong>di</strong> spessore <strong>del</strong> <strong>di</strong>sco per effetto <strong>del</strong>la rotazione.Al centro <strong>del</strong> <strong>di</strong>sco:σ r = σ θ = 3 + ν ρ ω 2 re 2 = 3 + ν · 7800 · <strong>10</strong>0 2 = 32.4 · <strong>10</strong> 6 [P a] = 32.4 [MP a].88. La massima riduzione <strong>di</strong> spessore <strong>del</strong> <strong>di</strong>sco si ha <strong>al</strong> centro <strong>del</strong> <strong>di</strong>sco stesso dove èmassimo in v<strong>al</strong>ore assoluto il v<strong>al</strong>ore <strong>di</strong> ɛ z. Per r = 0 si ha:ɛ z = − ν E ρ ω2 ( 3 + ν4Assumendo ν = 0.3, E = 200000 MPa ed esprimendo tutto nel SI si ha:0.3ɛ z = −200000 <strong>10</strong> 7800 3 + 0.36 <strong>10</strong>02 = −96 · <strong>10</strong> −6 = −96 [µɛ]4. La massima riduzione <strong>di</strong> spessore <strong>al</strong> centro <strong>del</strong> <strong>di</strong>sco risulta:∆s = ɛ z · s = −96 · <strong>10</strong> −6 · 20 [mm] = 0, 002 [mm]r 2 e)85
Disco foratoSe il <strong>di</strong>sco rotante è forato, le con<strong>di</strong>zioni <strong>al</strong> contorno sonoe le espressioni degli sforzi sono:σ r = 3 + ν8σ θ = 3 + ν8σ r = 0 per r = r iσ θ = 0 per r = r eρ ω 2 (r 2 i + r 2 e − r2 e r 2 ir 2 − r 2 )ρ ω 2 (r 2 i + r 2 e + r2 e r 2 ir 2− 1 + 3ν3 + ν r2 )ovunque <strong>di</strong> trazioneovunque <strong>di</strong> trazione(5.31)Il v<strong>al</strong>ore massimo <strong>di</strong> σ r è:(σ r ) max = 3 + ν8ρω 2 ( (ri 2 − re2 ) 3 + ν = ρω 2 r 2 1 − 1 ) 28ae si ha per r = √ r i r e , mentre il v<strong>al</strong>ore massimo <strong>di</strong> σ θ è(σ θ ) max = 3 + ν4(ρ ω 2 re 2 + 1 − ν )3 + ν r2 i = 3 + ν ρ ω 2 re2 4(1 + 1 − ν3 + ν)1a 2e si manifesta <strong>al</strong>l’intradosso.All’estradosso si ha il minimo v<strong>al</strong>ore <strong>di</strong> σ θ :(σ θ ) r=re = 3 + ν (ρω 2 ri 2 + 1 − ν )43 + ν r2 e = 3 + ν4ρω 2 r 2 e( 1a 2 + 1 − ν )3 + νL’andamento degli sforzi è mostrato nella Fig. 5.6. Si può osservare che il v<strong>al</strong>oredegli sforzi <strong>di</strong>pende d<strong>al</strong>la forma (rapporto r e /r i ), d<strong>al</strong>la densità ρ, d<strong>al</strong> coefficiente<strong>del</strong> Poisson ν e d<strong>al</strong>la velocità periferica v p = ω r e .E’ interessante notare come per un foro molto piccolo presente sull’asse (r i → 0),cioè per a → ∞, si ottiene:σ θ, max = 3 + ν ρω 2 re2 4che è il doppio <strong>del</strong> v<strong>al</strong>ore <strong>di</strong> σ θ <strong>al</strong> centro <strong>di</strong> un <strong>di</strong>sco pieno rotante.Esempio 5.3 Si consideri un <strong>di</strong>sco pieno in acciaio (ρ = 7800kg/m 3 ) rotante convelocità <strong>di</strong> rotazione ω = 3000 [g/min], avente r e =1 [m] e r i=0.2 [m], con uno spessores= 40 [mm]. Alla periferia <strong>del</strong> <strong>di</strong>sco sono vincolate 64 p<strong>al</strong>ette avente ognuna unamassa m p = 1[kg], si c<strong>al</strong>coli lo stato <strong>di</strong> sforzo <strong>al</strong>l’intradosso <strong>del</strong> <strong>di</strong>sco.86
<strong>10</strong>.8σ r/(ρ ω 2 r e2 )σ θ/(ρ ω 2 r e2 )σ/(ρ ω 2 r e2 )0.60.40.200 0.2 0.4 0.6 0.8 1(r−r i)/(r e−r i)Figura 5.6: Andamento <strong>di</strong> σ r e σ θ per il <strong>di</strong>sco rotante a ω costante con r e /r i = 4.C<strong>al</strong>colando la risultante tot<strong>al</strong>e dovute <strong>al</strong>la forza centrifuga <strong>del</strong>le p<strong>al</strong>ette (ω = 314.15 [rad/s])si ottiene che:F r = 64 · m p · ω 2 · r e = 6.316 · <strong>10</strong> 6 [N]<strong>di</strong>videndo per l’area tot<strong>al</strong>e su cui è applicata F r (la superficie esterna <strong>del</strong> <strong>di</strong>sco) nerisulta:F rσ ext == 25.13 [MP a]2π · r e · sLo stato <strong>di</strong> sforzo <strong>al</strong>l’intradosso <strong>del</strong> <strong>di</strong>sco turbina è quin<strong>di</strong> la sovrapposizione <strong>del</strong>losforzo dovuto a σ ext(che già contiene la forza centrifuga <strong>del</strong>le p<strong>al</strong>ette) e <strong>di</strong> quellodovuto <strong>al</strong>la rotazione <strong>del</strong> <strong>di</strong>sco. In particolare:σ θ = σ θ,ω + σ θ,σext = 640.46 + 52.35 = 692.81 [MP a]Come si vede chiaramente d<strong>al</strong>l’esempio, nel <strong>di</strong>sco rotante gli sforzi circonferenzi<strong>al</strong>imaggiori sono <strong>al</strong>l’intradosso e, nei casi <strong>di</strong> interesse applicativo in cui (ω ·r e )assume v<strong>al</strong>ori elevati, sono sicuramente impegnativi per i materi<strong>al</strong>i <strong>di</strong> comuneimpiego. Nelle turbine (a vapore o a gas) il profilo dei <strong>di</strong>schi (che sono anchesoggetti <strong>al</strong>le forze ra<strong>di</strong><strong>al</strong>i centrifughe <strong>del</strong>le p<strong>al</strong>ette) presentano uno spessoremaggiore <strong>al</strong>l’intradosso proprio per presi<strong>di</strong>are t<strong>al</strong>i sforzi circonferenzi<strong>al</strong>i.Le p<strong>al</strong>ette vengono fissate <strong>al</strong>l’esterno <strong>del</strong> <strong>di</strong>sco me<strong>di</strong>ante opportuni collegamentiche permettono un facile montaggio <strong>del</strong>le p<strong>al</strong>e ed il trasferimento deglielevati carichi <strong>al</strong> <strong>di</strong>sco turbina attraverso un accoppiamento <strong>di</strong> forma (vedasiFig. 5.7(b)).87
(a)(b)Figura 5.7: Applicazione an<strong>al</strong>isi <strong>di</strong>schi: a) <strong>di</strong>sco turbina con p<strong>al</strong>ette; b) particolareattacco p<strong>al</strong>ette.88
5.2.3 Metodo <strong>di</strong> GrammelEsistono <strong>al</strong>cune soluzioni an<strong>al</strong>itiche per i <strong>di</strong>schi <strong>di</strong> spessore variabile [9], masi può trovare una soluzione sod<strong>di</strong>sfacente <strong>al</strong> problema <strong>di</strong>videndo il <strong>di</strong>sco in ncorone circolari <strong>di</strong> spessore costante h i (i = 1, n), assumendo uno spessore pari<strong>al</strong> v<strong>al</strong>ore me<strong>di</strong>o nel tratto considerato. Questo modo <strong>di</strong> procedere si chiamametodo <strong>del</strong> Grammel [<strong>10</strong>].Figura 5.8: Disco <strong>di</strong> spessore variabile: sud<strong>di</strong>visione in n corone <strong>di</strong> spessorecostante.Per ciascuna corona v<strong>al</strong>gono le espressioni degli sforzi trovati per <strong>di</strong>sco rotante<strong>di</strong> spessore costante:σ r = C 1i + C 2ir 2σ θ = C 1i − C 2ir 2− 3 + ν r 28− 1 + 3ν r 28Le 2n costanti C 1i e C 2i con (i = 1, n) si determinano con le due con<strong>di</strong>zioni <strong>al</strong>contorno sulle superficie interna ed esterna:σ r = −p int per r = r int prima coronaσ r = σ ext per r = r ext n-esima corona(5.32)e con 2(n − 1) con<strong>di</strong>zioni <strong>di</strong> contatto tra n corone.Considerato il <strong>di</strong>sco i-esimo e la superficie <strong>di</strong> contatto con il <strong>di</strong>sco successivo(posta a r = r i ) possiamo scrivere l’equazione <strong>di</strong> equilibrio <strong>del</strong>le forze ra<strong>di</strong><strong>al</strong>i:σ (i)rh i = σ (i+1)r h i+1 (5.33)e l’equazione <strong>di</strong> congruenza imponendo l’uguaglianza <strong>del</strong>le deformazioni circonferenzi<strong>al</strong>i:σ (i)θ est − ν σ(i) r est = σ (i+1)θ int− ν σ(i+1) r int (5.34)89
questa seconda, esprimendo l’uguaglianza <strong>del</strong>le deformazioni circonferenzi<strong>al</strong>i,impone l’uguaglianza degli spostamenti ra<strong>di</strong><strong>al</strong>i. Le due equazioni precedenti,queste possono essere scritte per ognuno <strong>del</strong>le (n − 1) superfici <strong>di</strong> contatto,formando quin<strong>di</strong> con le (5.32) un sistema <strong>di</strong> (2 · n) incognite in (2 · n) equazioni.In molti casi pratici, per esempio <strong>di</strong>schi <strong>di</strong> bassa pressione <strong>di</strong> turbine a vapore,in cui lo spessore aumenta molto verso il mozzo, l’approssimazione piùgravosa sta nel considerare v<strong>al</strong>ide le relazioni che danno gli sforzi ricavati perspessore infinitesimo. La variabilità <strong>del</strong>lo spessore può essere seguita molto beneaumentando il numero <strong>del</strong>le corone, introducendo tutta la procedura in unopportuno programma <strong>di</strong> c<strong>al</strong>colo.E’ interessante notare come le espressioni soprascritte esprimono il metodo <strong>del</strong>leforze con i passi usu<strong>al</strong>i, in particolare:• mettiamo in evidenza le iperstatiche (le forze ra<strong>di</strong><strong>al</strong>i σ (i)r · h i );• c<strong>al</strong>coliamo le iperstatiche in modo da ricostruire le congruenza <strong>del</strong>le deformazioni.5.3 Cilindri lunghiIl problema dei <strong>di</strong>schi sottili è un problema <strong>di</strong> sforzo piano, σ z = 0, mentrenei cilindri indefinitamente lunghi ogni piano norm<strong>al</strong>e <strong>al</strong>l’asse <strong>del</strong> cilindro è unpiano <strong>di</strong> simmetria e quin<strong>di</strong> t<strong>al</strong>e sezione può spostarsi solo par<strong>al</strong>lelamente a sestessa, cioè ɛ z = costante (le sezioni si mantengono piane).Per il cilindro deve inoltre v<strong>al</strong>ere la con<strong>di</strong>zione glob<strong>al</strong>e <strong>di</strong> equilibrio:∫σ z dA = N (5.35)Aessendo N la forza assi<strong>al</strong>e agente sulle basi. L’effetto <strong>di</strong> <strong>al</strong>tri carichi (flessione,taglio, torsione) si considera a parte e poi si applica la sovrapposizione deglieffetti poiché si è in campo elastico lineare.Procedendo come già fatto per i <strong>di</strong>schi e introducendo il legame sforzideformazioninell’equazione <strong>di</strong> congruenza si ottiene:(1 + ν) σ θ − (1 + ν)σ r + r dσ θdr − r ν dσ rdr − r ν dσ zdr + α E r dTdr = 0 (5.36)D<strong>al</strong>l’espressione <strong>del</strong>la <strong>di</strong>latazione assi<strong>al</strong>e:ɛ z = 1 E [σ z − ν (σ r + σ θ )] + α T (r)poiché ɛ z = cost lungo la sezione, deve essere:dɛ zdr = 0 = 1 Eddr [σ z − ν (σ r + σ θ )] + α T (r)dr(5.37)90
da cui si ottiene:dσ zdr = ν d dr (σ r + σ θ ) + α T (r)drTenendo conto <strong>di</strong> questa espressione si ottiene:(5.38)(1+ν)σ θ −(1+ν)σ r +r(1−ν 2 ) dσ θdr −rν (1+ν)dσ rdT+(1+ν)αE rdr dr = 0 (5.39)e infine introducendo ancora la funzione <strong>di</strong> sforzo F si ottiene ancora un’equazione<strong>di</strong> Eulero, an<strong>al</strong>oga a quella dei <strong>di</strong>schi, in cui <strong>al</strong> secondo membro la ν comparein modo <strong>di</strong>verso:r 2 d2 Φ ′dr 2Integrando si ottiene:+ r dΦ′dr − Φ′ = −ρ ω 2 r 3 3 − 2ν1 − ν − αE dTr21 − ν dr(5.40)e successivamente:Φ ′ = C 1 r + C 2r − 3 − 2ν8(1 − ν) ρω2 r 3 − αE1 − νσ r = C 1 + C 2r 2 − 3 − 2ν8(1 − ν) ρω2 r 2 − αE1 − νσ θ = C 1 − C 2r 2 − 1 − 2ν8(1 − ν) ρω2 r 2 + αE1 − νDa queste si ricava:e quin<strong>di</strong>:σ r + σ θ = 2 C 1 −1r∫ rk∫1 rr 2 T r drk∫1 rr 2 T r dr −kT r dr (5.41)αE (5.42)1 − ν T12(1 − ν) ρω2 r 2 − αE1 − ν T (5.43)dσ zdr = ν d dr (σ r + σ θ ) − αE dTdr = − ν1 − ν ρω2 r − ν dTαE1 − ν dre integrando si ha l’espressione <strong>di</strong> σ z :− αEdTdr (5.44)νσ z = −2(1 + ν) ρω2 r 2 − αE1 − ν T + C 3 (5.45)C 3 si c<strong>al</strong>cola imponendo l’equilibrio sulle basi, per esempioe si ottieneC 3( r2e2 − r2 i2)N =∫ rer iσ z dA ,= N ( )2π + ν r4e2(1 + ν) ρω2 4 − r4 i−491αE1 − ν∫ rer iT r dr
Si vede che nell’espressione <strong>di</strong> σ z i termini che <strong>di</strong>pendono da r sono quelli dovuti<strong>al</strong>la rotazione.Nel caso in cui agiscano solo le pressioni interna ed esterna si ha lo sforzoσ z = costante = N/A. Se N = 0 non si hanno sforzi assi<strong>al</strong>i. In questo caso lasoluzione è quella già trovata per i <strong>di</strong>schi che dà ɛ z = cost., come deve essereper l’unicità <strong>del</strong>la soluzione <strong>del</strong> problema termoelastico.5.3.1 Cilindro rotante a velocità angolare costanteCilindro pienoNel caso <strong>del</strong> cilindro pieno con superficie esterna scarica e con N = 0 si ottieneσ r =σ θ =σ z =3 − 2ν8(1 − ν) ρ ω2 r 2 e3 − 2ν8(1 − ν) ρ ω2 r 2 eν4(1 − ν) ρ ω2 r 2 e) (1 − r2r 2 e(1 − 1 + 2ν3 − 2 ν(1 − 2 r2r 2 eovunque <strong>di</strong> trazione)ovunque <strong>di</strong> trazioner 2re2)si annulla per r = r e√2(5.46)L’andamento <strong>di</strong> t<strong>al</strong>i sforzi lungo il raggio è riportato nella Fig. 5.9. Al centro0.50.40.3σ/(ρ ω 2 r e2 )0.20.<strong>10</strong>−0.1σ r/(ρ ω 2 r e2 )σ θ/(ρ ω 2 r e2 )σ z/(ρ ω 2 r e2 )−0.20 0.2 0.4 0.6 0.8 1r/r eFigura 5.9: Andamento degli sforzi lungo il raggio <strong>di</strong> un cilindro rotante (ν = 0.3).92
<strong>del</strong> cilindro per r = 0 si ha:σ r = σ θ =3 − 2ν8(1 − ν) ρ ω2 re2νσ z =4(1 − ν) ρ ω2 re2(5.47)per ν = 0.3 t<strong>al</strong>i relazioni forniscono:{σr = σ θ = 0.428 ρ ω 2 r 2 eσ z = 0.<strong>10</strong>7 ρ ω 2 r 2 eI v<strong>al</strong>ori sono leggermente maggiori <strong>di</strong> quelli trovati per il <strong>di</strong>sco sottile, ma nelcilindro è presente anche uno sforzo σ z > 0: il confronto dei cerchi <strong>di</strong> Mohr neidue casi è mostrato in Fig. 5.<strong>10</strong>.0.20.150.1τ/(ρ ω 2 r e2 )DiscoCilindroσ0.05σ σ zzθ=σ r0 0.1 0.2 0.3 0.4 0.500 0.1 0.2 0.3 0.4 0.5−0.05−0.1σ/(ρ ω 2 r e2 )−0.15−0.2Figura 5.<strong>10</strong>: Cerchi <strong>di</strong> Mohr per <strong>di</strong>sco e cilindro rotanti pieni in corrispondenza<strong>del</strong>l’asse con ν = 0.3.C<strong>al</strong>colando la sollecitazione equiv<strong>al</strong>ente <strong>di</strong> Guest-Tresca:¯σ GT,cil = (0.428 − 0.<strong>10</strong>7) ρ ω 2 r 2 e = 0.321 ρ ω 2 r 2 e¯σ GT,<strong>di</strong>s = (0.412 − 0) ρ ω 2 r 2 e = 0.412 ρ ω 2 r 2 esi può facilmente verificare come il lo stato <strong>di</strong> sforzo nel <strong>di</strong>sco sia più gravoso <strong>di</strong>quello <strong>del</strong> cilindro.93
Al bordo esterno gli sforzi sono:σ r = 0σ θ = 1 − 2 ν4(1 − ν) ρ ω2 re2νσ z = −4(1 − ν) ρ ω2 re2per ν = 0.3 t<strong>al</strong>i sforzi risultano:Cilindro cavoσ r = 0; σ θ = 0.146 ρ ω 2 r 2 e; σ z = −0.<strong>10</strong>7 ρ ω 2 r 2 eSe il cilindro è cavo supponendo che le superficie later<strong>al</strong>i siano scariche, lecon<strong>di</strong>zioni <strong>al</strong> contorno si esprimono come:{σr = 0 per r = r iσ r = 0 per r = r eImponendo t<strong>al</strong>i con<strong>di</strong>zioni <strong>al</strong> contorno e ricavando le costanti C 1 e C 2 si ottiene:σ r =3 − 2ν (8(1 − ν) ρ ω2 re2 1 + 1 )a 2 − r2 ir 2 − r2re2 ovunque <strong>di</strong> trazioneσ θ =3 − 2ν (8(1 − ν) ρ ω2 re2 1 + 1 a 2 + r2 ir 2 − 1 + 2ν r 2 )3 − 2ν re2 ovunque <strong>di</strong> trazioneνσ z =4(1 − ν) ρ ω2 re(1 2 + 1 )a 2 − 2r2 re2 (5.48)L’andamento degli sforzi in funzione √ <strong>del</strong> raggio, per a = 4, è riportato nellari figura 5.11. Si ha σ z = 0 per r =2+r2 e2.La σ r è massima quando è minima la somma r2 ir+ r22 r ecioè, dato che il prodottodei due adden<strong>di</strong> è costante, quando r2 ir= r22 re quin<strong>di</strong> per r = √ re2 i r e dove v<strong>al</strong>e:σ r max =3 − 2ν8(1 − ν) ρ ω2 re(1 2 − 1 )a 2La σ θ e la σ z sono massime <strong>al</strong>l’intradosso dove v<strong>al</strong>gono:σ θ max =3 − 2ν (4(1 − ν) ρ ω2 re2 1 + 1 − 2ν )13 − 2ν a 2 per r = r iνσ z max =4(1 − ν) ρ ω2 re(1 2 − 1 ) (5.49)a 2 per r = r i94
σ/(ρ ω 2 r e2 )<strong>10</strong>.80.60.40.2σ r/(ρ ω 2 r e2 )σ θ/(ρ ω 2 r e2 )σ z/(ρ ω 2 r e2 )0−0.20 0.2 0.4 0.6 0.8 1(r−r i)/(r e−r i)Figura 5.11: Sforzi in un cilindro lungo rotante per a = 4 (ν = 0.3).Sulla superficie esterna si ha il v<strong>al</strong>ore minimo sia <strong>di</strong> σ z sia <strong>di</strong> σ θσ θ min =3 − 2ν ( 1 − 2ν4(1 − ν) ρ ω2 re2 3 − 2ν + 1 )a 2 per r = r eνσ z min = −4(1 − ν) ρ ω2 re(1 2 − 1 )a 2 per r = r eNel caso <strong>di</strong> un foro molto piccolo presente <strong>al</strong> centro <strong>del</strong> cilindro rotante, d<strong>al</strong>leequazioni precedenti per a → ∞, si ottiene:σ θ, max =3 − 2ν4(1 − ν) ρω2 re2νσ z, max =4(1 − ν) ρω2 re2E’ facile verificare che σ θ, max in presenza <strong>del</strong> foro è il doppio <strong>del</strong> v<strong>al</strong>ore <strong>di</strong> uncilindro pieno, mentre la σ z rimane in<strong>al</strong>terata in quanto un foro, lungo l’asse z,non provoca <strong>al</strong>cuna concentrazione <strong>di</strong> tensioni.5.4 EserciziEsercizio 5.1 Dato un <strong>di</strong>sco forato (D=60 mm) su cui viene c<strong>al</strong>ettato un <strong>di</strong>sco forato(D i = 60 mm, D e = 160 mm), ambedue i <strong>di</strong>schi sono in acciaio:• c<strong>al</strong>colare l’interferenza necessaria ad assicurare una pressione <strong>di</strong> contatto <strong>di</strong> 60MPa;95
• c<strong>al</strong>colare la pressione <strong>di</strong> contatto se l’insieme dei due corpi viene posto in rotazionead una velocità <strong>di</strong> 3000 [g/min](il c<strong>al</strong>colo si fa immaginando che per effetto<strong>del</strong>la rotazione le superfici dei due <strong>di</strong>schi subiscano uno spostamento ra<strong>di</strong><strong>al</strong>e);• verificare che la soluzione <strong>del</strong> punto precedente poteva essere ottenuta me<strong>di</strong>anteil principio <strong>di</strong> sovrapposizione degli effetti.Esercizio 5.2 Si abbia un tubo da re<strong>al</strong>izzare in acciaio inox AISI 17-4 PH (R m =1<strong>10</strong>0 [MP a], R p0.2 = <strong>10</strong>00 [MP a]), costituente un intensificatore <strong>di</strong> pressione per unwater-jet, con un <strong>di</strong>ametro <strong>di</strong> 30 mm soggetto ad una pressione interna pulsante <strong>di</strong>250 [MP a]. Quesiti:• c<strong>al</strong>colare il minimo <strong>di</strong>ametro esterno <strong>del</strong> tubo in modo che il tubo possa resisterea fatica illimitata (si assuma la superficie interna <strong>del</strong> tubo rettificata);• c<strong>al</strong>colare come cambia il coefficiente <strong>di</strong> sicurezza a fatica sulla superficie interna<strong>del</strong> tubo se a questo (me<strong>di</strong>ante forzamento <strong>di</strong> una camicia esterna) venisseimposta una pressione esterna <strong>di</strong> 50 [MP a].Esercizio 5.3 Dimensionare la camicia esterna, re<strong>al</strong>izzata nello stesso acciaio <strong>del</strong> tubo,che permetta <strong>di</strong> avere una pressione <strong>di</strong> contatto <strong>di</strong> 50 [MP a] tra i due tubi <strong>del</strong>l’esercizioprecedente.C<strong>al</strong>colare inoltre come cambia lo stato <strong>di</strong> sforzo nel foro <strong>del</strong>l’intensificatore per effetto<strong>del</strong>la camicia forzata.96
Capitolo 6Lastre circolari pianeSi an<strong>al</strong>izza in questo capitolo, a partire d<strong>al</strong> legame tra curvature e momenti <strong>del</strong>le lastrepiane, si an<strong>al</strong>izza lo stato <strong>di</strong> sforzo in lastre circolari caricate simmetricamente soggette acon<strong>di</strong>zioni <strong>di</strong> carico che si rifanno <strong>al</strong>le comuni applicazioni nei recipienti in pressione 1 .6.1 Flessione semplice <strong>di</strong> una lastra in due <strong>di</strong>rezioniortogon<strong>al</strong>iConsideriamo una lastra <strong>di</strong> spessore t inflessa nei due piani xz ed yz da coppieuniformemente ripartite [11]. Chiamiamo M x ed M y i momenti per unità <strong>di</strong>lunghezza <strong>di</strong> ciascun lato. La lastra si inflette in entrambe le <strong>di</strong>rezioni ed ilpiano me<strong>di</strong>o xy <strong>di</strong>venta una superficie a doppia curvatura, la superficie elastica<strong>del</strong>la lastra.An<strong>al</strong>ogamente a ciò che accade nelle travi, ogni segmento perpen<strong>di</strong>colare <strong>al</strong>piano me<strong>di</strong>o si mantiene rettilineo e norm<strong>al</strong>e <strong>al</strong>la superficie elastica. Inoltre, segli spostamenti w dei punti <strong>del</strong> piano me<strong>di</strong>o sono piccoli rispetto <strong>al</strong>lo spessore t,possiamo ritenere che le deformazioni ɛ x ed ɛ y siano proporzion<strong>al</strong>i <strong>al</strong>la <strong>di</strong>stanzaz d<strong>al</strong> piano me<strong>di</strong>o (ovvero le deformazioni sono nulle sul piano me<strong>di</strong>o). Inparticolare:ɛ x = z , ɛ y = z (6.1)ρ x ρ ySe d<strong>al</strong>le deformazioni ricaviamo gli sforzi otteniamo:σ x = E · z ( 11 − ν 2 + ν 1 ), σ y = E · z ( 1ρ x ρ y 1 − ν 2 + ν 1 )ρ y ρ x(6.2)I momenti per unità <strong>di</strong> lunghezza applicati <strong>al</strong>la lastra stanno in relazione congli sforzi (prendendo <strong>del</strong>le porzioni <strong>di</strong> larghezza unitaria) tramite le:M x =1 a cura <strong>di</strong> S. Beretta∫ +t/2−t/2σ x · 1dz · z, M y =∫ +t/2−t/2σ y · 1dz · z (6.3)97
Sostituendo le (6.2) si ottiene:e:dove:M x = D( 1ρ x+ ν 1 ρ y)( 1M y = D + ν 1 )ρ y ρ xD =E ∫ +t/21 − ν 2 z 2 Et 3dz =12(1 − ν 2 )−t/2rappresenta la rigidezza flession<strong>al</strong>e <strong>del</strong>la lastra.(6.4)(6.5)(6.6)t t/2 t/2 Figura 6.1: Flessione semplice in due piani <strong>di</strong> una lastra [11].6.1.1 Composizione dei momenti in un puntoConsiderando le sollecitazioni σ x e σ y agenti in un punto, possiamo c<strong>al</strong>colarele sollecitazioni agenti su un piano avente norm<strong>al</strong>e n con coseni <strong>di</strong>rettori[cos α sin α] con le relazioni <strong>del</strong> cerchio <strong>di</strong> Mohr:{σn = σ x cos 2 α + σ y sin 2 α(6.7)τ nt = (σ y − σ x ) sin α cos αSe gli sforzi σ x e σ y sono gli sforzi generati ad una <strong>di</strong>stanza z d<strong>al</strong> piano me<strong>di</strong>odai momenti M x ed M y in una fetta <strong>di</strong> lastra, se ne deduce che sulla facciainclinata nascono: un momento norm<strong>al</strong>e M n , che genera σ n , ed un momento98
σ xσ xαYσ yσ yτ ntnσ nM yzτ ntσ nM ntM xtXM n(a)(b)Figura 6.2: Composizione momenti su un piano: a) sforzi su un piano aventecoseni <strong>di</strong>rettori [cos α sin α]; b) i momenti flettenti sulla faccia <strong>di</strong> una lastra aventela medesima inclinazione.torcente M nt , che genera τ nt . Si può quin<strong>di</strong> facilmente ricavare che t<strong>al</strong>i momenti<strong>di</strong>pendono d<strong>al</strong>la <strong>di</strong>rezione <strong>del</strong>la norm<strong>al</strong>e n con le relazioni:{Mn = M x cos 2 α + M y sin 2 α(6.8)M nt = (M y − M x ) sin α cos αPoichè le relazioni tra gli sforzi sono ugu<strong>al</strong>i <strong>al</strong>le relazioni tra i momenti, ne segueche i momenti agenti in un punto <strong>al</strong> variare <strong>del</strong>la giacitura possono essere rappresentatisu un cerchio esattamente come gli sforzi: esistono due momenti princip<strong>al</strong>iche corrispondono ai momenti norm<strong>al</strong>i massimo e minimo (si verificanosu piani in cui M nt è nullo).La costruzione grafica permette <strong>di</strong> anche capire come l’unico caso in cui nonvi sia M nt è quello in cui i due momenti princip<strong>al</strong>i siano coincidenti.M ntMy2αMxFigura 6.3: Cerchio <strong>di</strong> Mohr per i momenti agenti in un punto.99
6.1.2 Lastre con momento uniformeNel caso <strong>di</strong> M x = M y = m (flessione uniforme), le due curvature 1/ρ x ed 1/ρ ysono ugu<strong>al</strong>i tra <strong>di</strong> loro e risulta:1ρ = m(1 + ν)D(6.9)ovvero la superficie elastica <strong>di</strong>venta una sfera (una porzione <strong>di</strong> sfera) avente unraggio ρ.Se consideriamo una lastra circolare soggetta ad un momento <strong>di</strong>stribuito mcostante sul contorno (essendo M x = M y = m si ha un momento costante intutte le <strong>di</strong>rezioni), ci troviamo in t<strong>al</strong>e situazione. In particolare detto R il raggio<strong>del</strong>la lastra, la rotazione α <strong>al</strong> contorno e la freccia f <strong>al</strong> centro risultano:wFigura 6.4: Lastra circolare soggetta a momento costante m sul contorno [11].α = R ρ =m · R(1 + ν)D(6.<strong>10</strong>)f = 2R28ρ = mR 2(6.11)2(1 + ν)DLa superficie secondo cui si atteggia la lastra è descritta d<strong>al</strong>l’equazione:m (w =R 2 − r 2) (6.12)2(1 + ν)D6.2 Lastre circolari assi<strong>al</strong>simmetricheAn<strong>al</strong>izziamo come si possa arrivare ad un’equazione risolvente che ci permetta<strong>di</strong> determinare la soluzione <strong>del</strong> problema elastico nel caso <strong>di</strong> lastre circolarisoggette ad una <strong>di</strong>stribuzione <strong>di</strong> carico assi<strong>al</strong>simmetrica [12].<strong>10</strong>0
Se consideriamo una lastra circolare soggetta da una <strong>di</strong>stribuzione <strong>di</strong> sforzoassi<strong>al</strong>simmetrica, la deformata sarà anch’essa <strong>del</strong>lo stesso tipo e ci basta an<strong>al</strong>izzarela deformata lungo un qu<strong>al</strong>siasi <strong>di</strong>ametro. Consideriamo l’origine O <strong>del</strong>nostro riferimento <strong>al</strong> centro <strong>del</strong>la lastra ed in<strong>di</strong>chiamo con w l’abbassamento<strong>del</strong>la lastra. La curvatura <strong>del</strong>la lastra in <strong>di</strong>rezione ra<strong>di</strong><strong>al</strong>e in un punto A risultaespressa da:1= − d2 wρ r dr 2 (6.13)e quella in <strong>di</strong>rezione circonferenzi<strong>al</strong>e (la superficie dei punti lungo lo spessoreavente la medesima <strong>di</strong>stanza r d<strong>al</strong> centro si atteggia secondo un cono aventecentro in B) con:1= − 1 dw(6.14)ρ θ r drIl legame tra momenti e curvature risulta quin<strong>di</strong> 2 :Figura 6.5: Raggi <strong>di</strong> curvatura nella deformazione <strong>di</strong> una lastra circolare.( d 2 wM r = −D)dwdrdr 2 + ν r( )1 dwM θ = −Dr dr + ν d2 wdr 2(6.15)(6.16)Consideriamo una porzione <strong>di</strong> lastra abcd <strong>di</strong> larghezza dr e <strong>del</strong>imitata d<strong>al</strong>l’angolodθ e soggetta ad un carico <strong>di</strong>stribuito q: sulle facce ab e cd agiscono le forze <strong>di</strong>taglio Q ed i momenti M r , mentre sulle facce ad e bc (per la con<strong>di</strong>zione <strong>di</strong>assi<strong>al</strong>simmetria) agiscono solo i momenti M θ .2 <strong>al</strong>la stesse equazioni si poteva arrivare, come visto a lezione, trasformando in coor<strong>di</strong>natepolari (e tenendo conto che ∂w/∂θ = 0 in un problema assi<strong>al</strong>simmetrico) il legame tra momentie curvature <strong>del</strong>le lastre in coor<strong>di</strong>nate cartesiane.<strong>10</strong>1
M θM θM rdθM r + dM r(a)(b)Figura 6.6: Equilibrio <strong>di</strong> una porzione <strong>di</strong> lastra: a) posizione geometrica e sezione;b) i momenti flettenti presenti sul concio [12].In particolare si può notare come le due coppie M θ <strong>di</strong>ano come risultante unmomento ra<strong>di</strong><strong>al</strong>e (<strong>di</strong>retto come il momento M r agente su cd) pari a:2 · M θ sin dθ2 dr = M θdrdθScrivendo quin<strong>di</strong> l’equilibrio <strong>al</strong>la rotazione <strong>del</strong>l’elementino abcd si ottiene:(M r + dM )rdr dr (r + dr)dθ − M r rdθ − M θ drdθ + Qrdrdθ = 0 (6.17)trascurando gli infinitesimi <strong>di</strong> or<strong>di</strong>ne superiore e <strong>di</strong>videndo per drdθ l’equazione<strong>di</strong> equilibrio si semplifica in:M r + dM rdr · r − M θ + Q · r = 0 (6.18)Esprimendo i momenti flettenti in termini <strong>di</strong> curvature, si ottiene la equazione<strong>di</strong>fferenzi<strong>al</strong>e:d 3 wdr 3 + 1 d 2 wr dr 2 − 1 dwr 2 dr = Q (6.19)Dche può essere riscritta come:[ (d 1 dr dw )]= Q (6.20)dr r dr dr DIl taglio Q è in equilibrio con il carico <strong>di</strong>stribuito q tramite la relazione:Q · 2πr =∫ rL’equazione <strong>di</strong>fferenzi<strong>al</strong>e può essere quin<strong>di</strong> riscritta come:0q · 2πrdr (6.21)<strong>10</strong>2
Figura 6.7: Equilibrio tra taglio Q e carico <strong>di</strong>stribuito q.[ (d 1 dr dw )]= 1dr r dr dr r · D∫ r<strong>di</strong>fferenziando rispetto ad r e <strong>di</strong>videndo per r si ottiene:{1 dr d [ ( 1 dr dw )]}= q r dr dr r dr dr D0q · rdr (6.22)(6.23)Nei paragrafi successivi vedremo come integrando t<strong>al</strong>e relazione, a <strong>di</strong>spetto <strong>del</strong>l<strong>al</strong>unghezza <strong>del</strong>la formula, sia semplice ottenere la soluzione in <strong>al</strong>cuni casiapplicativi <strong>di</strong> interesse.6.2.1 Carico <strong>di</strong>stribuitoConsideriamo una lastra soggetta ad un carico <strong>di</strong>stribuito q, esaminando la Fig.6.7 possiamo esprimere Q come:Q = qr2Se consideriamo la Eq.(6.20) possiamo quin<strong>di</strong> scrivere:[ (d 1 dr dw )]= qrdr r dr dr 2Dintegrando una volta:1rddr(r dw )= qr2dr 4D + C 1Moltiplicando per r ed integrando otteniamo:(6.24)(6.25)da cui:r dwdr = qr416D + C 1r 2+ C 22dwdr = qr316D + C 1r2 + C 2r<strong>10</strong>3
Integrando ancora una volta otteniamo fin<strong>al</strong>mente la soluzione (costituita daun’omogenea con i termini C 1 , C 2 e C 3 e da un’integr<strong>al</strong>e particolare contenenteq):w = qr464D + C 1r 2+ C 2 log r + C 3 (6.26)4Lastra incastrataq Figura 6.8: Lastra incastrata soggetta <strong>al</strong> carico <strong>di</strong>stribuito q.Consideriamo ora una lastra incastrata <strong>di</strong> raggio a, le con<strong>di</strong>zioni <strong>al</strong> contorno <strong>del</strong>problema sono:⎧⎨⎩dwdr = 0 per r = adwdr = 0 per r = 0Otteniamo che la equazione risolvente è:→{C2 = 0C 1 = − qa28DImponendo:w = qr464D − qa2 r 232D + C 3w(a) = 0 → C 3 = qa464DIn conclusione la soluzione è:w =q (a 2 − r 2) 264DLa freccia massima <strong>al</strong> centro risulta:(6.27)f max = qa464DI momenti flettenti risultano:M θ = q [a 2 (1 + ν) − r 2 (3 + ν) ] 16(6.28)M r = q [a 2 (1 + ν) − r 2 (1 + 3ν) ] 16(6.29)<strong>10</strong>4
I momenti nella sezione d’incastro (r = a) risultano:M r = − qa28M θ = −ν qa28Gli sforzi si ricavano dai momenti flettenti come:(6.30)σ r = 6M rt 2σ θ = 6M θt 2L’andamento degli sforzi è riportato nella Fig. 6.9: si può vedere come il puntopiù sollecitato per una lastra incastrata sia sul bordo esterno.Figura 6.9: Distribuzione degli sforzi nella lastra incastrata soggetta a pressione(carico <strong>di</strong>stribuito) costante.Lastra appoggiataLa lastra appoggiata si può ricavare a partire da quella <strong>del</strong>la lastra incastratasovrapponendo <strong>al</strong>la soluzione <strong>del</strong>l’incastro, quella <strong>di</strong> una lastra soggetta a deimomenti ra<strong>di</strong><strong>al</strong>i ugu<strong>al</strong>i e contrari <strong>al</strong> momento ra<strong>di</strong><strong>al</strong>e d’incastro. Poichè nellasoluzione che sovrapponiamo M r = M θ = −qa 2 /8 costante, ci basta sovrapporret<strong>al</strong>e v<strong>al</strong>ore <strong>al</strong>le equazioni dei momenti per la lastra incastrata.In particolare i momenti flettenti nella lastra appoggiata soggetta a carico<strong>di</strong>stribuito risultano:M θ = q [a 2 (3 + ν) − r 2 (1 + 3ν) ] (6.31)16M r = q16 (3 + ν)(a2 − r 2 ) (6.32)6.2.2 Carico concentratoConsiderando una lastra circolare appoggiata caricata <strong>al</strong> centro da un caricoconcentrato P, la soluzione <strong>del</strong>la deformata può essere ottenuta come limite (per<strong>10</strong>5
Figura 6.<strong>10</strong>: Soluzione <strong>del</strong>la lastra circolare soggetta a pressione appoggiata, comesovrapposizione <strong>del</strong>la soluzione incastrata (a) più una lastra soggetta a momenti<strong>di</strong>stribuiti che liberano ra<strong>di</strong><strong>al</strong>mente il bordo.c → 0) <strong>del</strong>la soluzione <strong>di</strong> una lastra in cui il carico P sia ripartito su un’area <strong>di</strong>raggio c (t<strong>al</strong>e soluzione si può ottenere con un metodo <strong>del</strong>le forze ricostruendola congruenza tra la lastra centr<strong>al</strong>e con carico <strong>di</strong>stribuito ed una lastra anularecaricata d<strong>al</strong> taglio Q e da un momento M [12]).PaFigura 6.11: Lastra circolare caricata <strong>al</strong> centro.Quando c → 0 la deformata <strong>del</strong>la lastra risulta espressa da:w =P [ 3 + ν16πD 1 + ν (a2 − r 2 ) + 2r 2 log r ]a(6.33)I momenti flettenti risultano:M r = P 4πM θ = P 4π (1 + ν) log a r[(1 + ν) log a ]r + 1 − ν(6.34)(6.35)Quando r → 0 le espressioni precedenti non possono essere utilizzate per v<strong>al</strong>utarei momenti flettenti e gli sforzi nella lastra in quanto tendono <strong>al</strong>l’infinito.Le assunzioni su cui è stata impostata la soluzione dei problemi <strong>del</strong>le lastre non<strong>10</strong>6
acMFigura 6.12: Lastra circolare caricata su una zona centr<strong>al</strong>e: la soluzione si ottienecercando le iperstatiche M e Q che ristabiliscono la congruenza degli spostamentitra le due porzioni <strong>di</strong> lastra.Qv<strong>al</strong>gono vicino <strong>al</strong> punto <strong>di</strong> applicazione <strong>del</strong> carico: quando c → 0 l’intensità<strong>del</strong>la pressione P/πc 2 non è più trascurabile in confronto agli sforzi flession<strong>al</strong>i,così come la deformazione dovuta <strong>al</strong>le azioni taglianti. Lo stato <strong>di</strong> sforzo vero èquello <strong>di</strong> una porzione <strong>di</strong> lastra cui si sovrappone la <strong>di</strong>stribuzione loc<strong>al</strong>e dovuta<strong>al</strong> carico carico concentrato (esaminato nella Sez. 3.3.5).Figura 6.13: Azioni loc<strong>al</strong>izzate in presenza <strong>di</strong> un carico concentrato [12].6.2.3 Lastra anulareMomenti applicatiConsideriamo una lastra anulare (<strong>di</strong> raggio interno b e raggio esterno a) soggetta<strong>al</strong>le coppie M 1 ed M 2 applicate ai bor<strong>di</strong>: il taglio è nullo, la soluzione si puòtrovare a partire d<strong>al</strong>la (6.26) con i termini <strong>del</strong>la soluzione <strong>del</strong>l’omogenea. Inparticolare riscriviamo per como<strong>di</strong>tà l’integr<strong>al</strong>e <strong>del</strong>l’omogenea come:w = C 1r 24+ C 2 log r a + C 3 (6.36)<strong>10</strong>7
abM 2M 1M 1M 2Figura 6.14: Lastra anulare con momenti sui bor<strong>di</strong>.Il momento M r risulta:M r = −D[C12 − C 2r 2 + ν (C12 + C 2r 2 )](6.37)Imponendo che: {Mr = M 1 per r = bM r = M 2 per r = aSi ottiene:C 12 = − (a 2 M 2 − b 2 M 1)(1 + ν)D(a 2 − b 2 )C 2 = − a2 b 2 (M 2 − M 1 )(1 − ν)D(a 2 − b 2 )(6.38)Dovendo essere w(a) = 0 si ottiene:C 3 = − C 1a 2(6.39)4E’ interessante notare che se b → 0, <strong>al</strong>lora C 2 = 0 e gli <strong>al</strong>tri termini <strong>di</strong>ventano:C 12 = − M 2(1 + ν)D C 3 = M 2a 22(1 + ν)D(6.40)e l’equazione <strong>del</strong>la deformata <strong>di</strong>venta identica <strong>al</strong>la (6.12) (là il raggio esternoera R): ciò significa che la presenza <strong>di</strong> un foro piccolo <strong>al</strong> centro <strong>del</strong>la lastra non<strong>al</strong>tera la deformazione <strong>del</strong>la lastra, ma ovviamente crea una concentrazione <strong>di</strong>sforzo da v<strong>al</strong>utare con i concetti esposti nel Cap. 2.Carico sul bordo internoConsideriamo una lastra anulare caricata sul bordo interno da un carico Puniformemente ripartito sul bordo interno. La forza <strong>di</strong> taglio Q risulta:Q = Q obr= P2πrIntegrando la (6.23) si ottiene una equazione <strong>del</strong> tipo [12]:(6.41)<strong>10</strong>8
Q oaFigura 6.15: Lastra anulare caricata sul bordo interno.w = P r24πD log r a + C 1r 2+ C 2 log r 4a + C 3 (6.42)Le costanti possono essere determinate imponendo che sul bordo esterno:( d 2 w(w) r=a = 0 − Ddr 2 + ν )dw= 0r drr=ae sul bordo interno: ( d 2 w−Ddr 2 + ν )dw= 0r drr=bNel caso b → 0 (un forellino infinitesimo) le costanti <strong>di</strong>ventano:C 1 = − 1 − ν P1 + ν 4πD C 2 = 0 C 3 = P a2 1 − ν16πD 1 + ν(6.43)e la espressione <strong>del</strong>la deformata coincide con la (6.33), confermando ancora comela presenza <strong>di</strong> un forellino <strong>al</strong> centro non faccia cambiare la deformata gener<strong>al</strong>e<strong>del</strong>la lastra.6.3 Esercizi e problemi sul quadernoEsercizio 6.1 Dato il fondo piano superiore <strong>del</strong> recipiente in pressione adottato nell’esercitazionesperiment<strong>al</strong>e, v<strong>al</strong>utare la rigidezza flession<strong>al</strong>e con la presenza <strong>del</strong> forocentr<strong>al</strong>e confrontandola con quella <strong>di</strong> una lastra non forata.Problema 6.1 Ricavare la <strong>di</strong>stribuzione dei momenti flettenti in una lastra incastratasoggetta a carico concentrato P <strong>al</strong> centro <strong>del</strong>la lastra, utilizzando la soluzione<strong>del</strong>la lastra appoggiata + quella <strong>del</strong>la lastra circolare soggetta a momento ra<strong>di</strong><strong>al</strong>e <strong>di</strong>estremità.Problema 6.2 Dato un acciaio con R p0,2=240 MPa ed un carico P=<strong>10</strong>00 [N], c<strong>al</strong>colarelo spessore t minimo per una lastra <strong>di</strong> raggio 500 mm che sopporti il carico ericavare la freccia massima.<strong>10</strong>9
Capitolo 7Lastre cilindricheIn questo capitolo, seguendo la notazione <strong>di</strong> Timoshenko [12], si an<strong>al</strong>izza lo stato <strong>di</strong> sforzoin lastre cilindriche indefinitamente lunghe caricate simmetricamente. Nelle applicazioni,affrontate con il metodo dei coefficienti elastici <strong>di</strong> bordo, si esaminano quin<strong>di</strong> comuni casirelativi ai recipienti in pressione 1 .7.1 Risoluzione <strong>del</strong> problema elasticoConsideriamo una lastra cilindrica come nella Fig. 7.1: è facile ricavare d<strong>al</strong>leequazioni <strong>di</strong> equilibrio <strong>del</strong>le lastre che, per le con<strong>di</strong>zioni <strong>di</strong> assi<strong>al</strong>simmetria, leuniche azioni flession<strong>al</strong>i presenti sono i momenti M x ed M φ (quest’ultimo costantelungo una circonferenza), l’unica azione tagliante è T x e le componentimembran<strong>al</strong>i sono N x ed N φ (anche questa costante lungo una circonferenza perassi<strong>al</strong>simmetria).Consideriamo un concio <strong>di</strong> lastra <strong>di</strong> <strong>di</strong>mensioni dx × Rdϕ (considerando che leuniche azioni che variano sui lati <strong>del</strong>l’elemento sono M x e T x , vedasi Fig. 7.2)soggetto ad una pressione <strong>di</strong>stribuita p. Scrivendo l’equilibrio lungo la <strong>di</strong>rezionex <strong>del</strong> concio <strong>di</strong> lastra otteniamo:∂N xRdxdϕ = 0 (7.1)∂xL’equazione <strong>di</strong> equilibrio lungo la <strong>di</strong>rezione z risulta:(T x + ∂T )x∂x dx Rdϕ − T x Rdϕ + N ϕ sin (dϕ) dx + pRdxdϕ = 0 (7.2)che si può semplificare come:1 a cura <strong>di</strong> S. Beretta e M. Sangirar<strong>di</strong>∂T x∂x Rdxdϕ + N ϕdϕdx + pRdxdϕ = 0 (7.3)1<strong>10</strong>
(a)M ϕM xT xN ϕN x(b)(c)Figura 7.1: Lastra cilindrica con carichi assi<strong>al</strong>simmetrici: a) posizione <strong>del</strong> problema;b) schematizzazione <strong>del</strong>l’elemento come lastra; c) schematizzazione <strong>del</strong>l’elementocome membrana.da cui:∂T x∂x + N ϕ= −p (7.4)RCon riferimento ancora <strong>al</strong>la Fig. 7.2 e imponendo l’equilibrio <strong>al</strong>la rotazione111
pFigura 7.2: Equilibrio <strong>del</strong>l’elemento infinitesimo.intorno <strong>al</strong>la <strong>di</strong>rezione circonferenzi<strong>al</strong>e si ottiene:(M x + ∂M )x∂x dx Rdϕ − M x Rdϕ − T x Rdϕdx = 0 (7.5)da cui:∂M x∂x − T x = 0 (7.6)Cercando <strong>di</strong> risolvere in forma chiusa il problema ci troviamo <strong>di</strong> fronte aduna <strong>di</strong>fficoltà in quanto abbiamo due equazioni (la 7.4 e la 7.6) in tre funzioniincognite.7.1.1 Deformazioni ed azioni sul concio <strong>di</strong> lastraConsiderando gli spostamenti elastici membran<strong>al</strong>i: la simmetria implica chela componente <strong>di</strong> spostamento circonferenzi<strong>al</strong>e u ϕ = 0, restano le componentiassi<strong>al</strong>e u e ra<strong>di</strong><strong>al</strong>e w. In particolare le componenti <strong>di</strong> deformazione sono:ɛ ϕm =ɛ xm = ∂u∂x(R − w) dϕ − RdϕRdϕ= − w R(7.7)(7.8)Esprimendo quin<strong>di</strong> gli sforzi in funzione <strong>del</strong>le deformazioni, possiamo scrivere:σ xm =σ ϕm =E1 − ν 2 (ɛ xm + νɛ ϕm ) (7.9)E1 − ν 2 (ɛ ϕm + νɛ xm ) (7.<strong>10</strong>)112
Figura 7.3: Componenti <strong>di</strong> deformazione.da cui le azioni membran<strong>al</strong>i (essendo s lo spessore <strong>del</strong>la lastra):N x =Es1 − ν 2 (ɛ xm + νɛ ϕm ) (7.11)N ϕ =Es1 − ν 2 (ɛ ϕm + νɛ xm ) (7.12)Sostituendo le deformazioni in funzione degli spostamenti:)N x =Es ( ∂u1 − ν 2 ∂x − ν w RN ϕ =Es (1 − ν 2 − w R + ν ∂u )∂x(7.13)(7.14)Se consideriamo lastre cilindriche non soggette ad <strong>al</strong>cun carico assi<strong>al</strong>e N x = 0 edovrà essere quin<strong>di</strong> 2 :∂u∂x = ν w (7.15)Rsostituendo quin<strong>di</strong> nella eq.(7.14) si ottiene:N ϕ =Es (− w 1 − ν 2 R + w )ν2 = −Es w (7.16)R RSe consideriamo il legame tra momenti flettenti e curvature già visto nel Cap. 3,poiché il problema è assi<strong>al</strong>simmetrico la superficie me<strong>di</strong>a <strong>del</strong>la lastra si può solospostare in <strong>di</strong>rezione ra<strong>di</strong><strong>al</strong>e, mantenendo costante la curvatura circonferenzi<strong>al</strong>e.Risulta quin<strong>di</strong>:s 3M x = −E(1 − ν 2 ) 12[ ∂ 2 ]w∂x 2 = − Es 3(1 − ν 2 ) 12∂ 2 w∂x 2 (7.17)2 questa è una ipotesi importante <strong>del</strong>la qu<strong>al</strong>e dovremo ricordarci per la soluzione dei problemipratici: in caso <strong>di</strong> sforzi assi<strong>al</strong>i dovremo risolvere il problema come sovrapposizionedegli effetti <strong>di</strong> sforzi assi<strong>al</strong>i (ricavabili <strong>del</strong>l’equilibrio assi<strong>al</strong>e) e sforzi circonferenzi<strong>al</strong>i dovuti<strong>al</strong>la pressione.113
M ϕ = −E(1 − ν 2 ) 12s 37.1.2 Equazione risolvente[ ]ν ∂2 w∂x 2 = − νEs 3(1 − ν 2 ) 12∂ 2 w∂x 2 (7.18)Derivando la (7.4) in x ed introducendo i termini nella Eq.(7.6) si ottiene:∂ 2 M x∂x 2+ N ϕR= −p (7.19)Sostituendo ora nell’eq.(7.19) le espressioni <strong>di</strong> N ϕ e M x <strong>del</strong>le equazioni (7.16) e(7.17), si ottiene:∂ 4 w∂x 4 + 12 ( 1 − ν 2)s 2 R 2 w = p D , (7.20)dove:D =Es 312 (1 − ν 2 )è il modulo <strong>di</strong> elasticità flession<strong>al</strong>e <strong>del</strong>la lastra. Ponendo:l’equazione risolutiva <strong>di</strong>venta:3 ( 1 − ν 2)s 2 R 2 = β 4 (7.21)∂ 4 w∂x 4 + 4β4 w = p D(7.22)L’omogenea (p = 0) ha per soluzione:w = e βx (C 1 cos (βx) + C 2 sin (βx)) + e −βx (C 3 cos (βx) + C 4 sin (βx)) (7.23)7.1.3 Un approccio basato sulla teoria <strong>del</strong>le traviSi può arrivare <strong>al</strong>l’equazione risolvente <strong>del</strong>le lastre cilindriche a partire d<strong>al</strong>lateoria <strong>del</strong>le travi [11].Consideriamo dapprima un concio <strong>di</strong> lastra cilindrica <strong>del</strong>imitatod<strong>al</strong>l’angolo dϕ, ed immaginiamo che subisca uno spostamento ra<strong>di</strong><strong>al</strong>ew.Per effetto <strong>del</strong>lo spostamento ra<strong>di</strong><strong>al</strong>e, la deformazione circonferenzi<strong>al</strong>e cui èsoggetto il concio è:ɛ ϕ = − w RNe segue che lo sforzo circonferenzi<strong>al</strong>e che ne nasce è:σ ϕ = −E · wRla cui risultante è la forza circonferenzi<strong>al</strong>e:N ϕ = −Es · wR114
Se componiamo ra<strong>di</strong><strong>al</strong>mente il contributo <strong>di</strong> N ϕ sui due lati <strong>del</strong> concio, immaginandoche sia assimilabile ad una pressione ra<strong>di</strong><strong>al</strong>e ρ otteniamo:2 · −Es · wR · dϕ 2= ρ · Rdϕ (7.24)da cui:ρ = − EsR 2 · w (7.25)Consideriamo ora una striscia longitu<strong>di</strong>n<strong>al</strong>e (sempre sottesa d<strong>al</strong>l’angolo dϕ) <strong>del</strong>l<strong>al</strong>astra soggetta <strong>al</strong>la pressione p. Ricordando che l’equazione <strong>di</strong> equilibrio <strong>del</strong>latrave soggetta ad un carico <strong>di</strong>stribuito è:EJ · w IV = p (7.26)Possiamo adattare questa equazione <strong>al</strong>la nostra striscia <strong>di</strong> lastra, considerandoche per una una strisciolina <strong>di</strong> lastra (date le deformazioni trasvers<strong>al</strong>i impe<strong>di</strong>te)<strong>al</strong> posto <strong>di</strong> EJ va considerato il termine:Es 3(1 − ν 2 )12Inoltre dobbiamo aggiungere <strong>al</strong> carico <strong>di</strong>stribuito p il carico trasvers<strong>al</strong>e ρ dovuto<strong>al</strong>la cerchiatura esercitata d<strong>al</strong>la lastra cilindrica sulla striscia, quin<strong>di</strong> <strong>al</strong> posto <strong>di</strong>p dobbiamo considerare:p + ρ = p − EswR 2L’equazione <strong>di</strong>fferenzi<strong>al</strong>e <strong>di</strong> equilibrio <strong>del</strong>la trave risulta quin<strong>di</strong>:ovvero questa equazione coincide con la (7.22).Es 312(1 − ν 2 ) wIV + EsR 2 w = p (7.27)wρN φdφRN φFigura 7.4: Risultante ra<strong>di</strong><strong>al</strong>e ρ per effetto <strong>del</strong>lo spostamento ra<strong>di</strong><strong>al</strong>e w.115
pρFigura 7.5: Striscia <strong>di</strong> lastra soggetta a ρ e p.7.1.4 Integr<strong>al</strong>i particolariSe p varia lungo il tubo con una legge <strong>del</strong> tipo p = cx n , l’integr<strong>al</strong>e particolare<strong>del</strong>la (7.22) è 3 :w =cxn4β 4 D = cxn R 2= pR2(7.28)Es EsLe forze circonferenzi<strong>al</strong>i che conseguono a questi spostamenti:N ϕ = − Es pR 2= −pR (7.29)R EsGli sforzi:σ ϕ = N ϕs= −pR (7.30)sGli sforzi circonferenzi<strong>al</strong>i sono proporzion<strong>al</strong>i solo <strong>al</strong>la pressione, con dei terminipari <strong>al</strong>lo sforzo <strong>di</strong> Mariotte. Da notarsi che gli sforzi sono negativi in quanto lapressione va nello stesso verso <strong>del</strong>l’asse z, nei recipienti in pressione più comunementesi ha una pressione maggiore <strong>al</strong>l’interno <strong>del</strong> recipeinte: in questo casop sarebbe negativa, come pure (d<strong>al</strong>le equazioni soprascritte) w, N ϕ e σ ϕ .7.2 Cilindri lunghi caricati su un bordoConsideriamo una lastra cilindrica indefinitamente lunga <strong>al</strong> cui bordo estremosiano applicati <strong>del</strong>le forze <strong>di</strong> taglio T o e <strong>del</strong>le coppie M o (forze e coppie perunità <strong>di</strong> lunghezza quin<strong>di</strong> <strong>di</strong>mension<strong>al</strong>mente sono [N/m] e [N · m/m]), comerappresentato in Fig. 7.6.3 v<strong>al</strong>e la relazione: 4β 4 D = Es/R 2 116
Figura 7.6: Effetti <strong>di</strong> bordo.La <strong>di</strong>stribuzione <strong>di</strong> forze è autoequilibrata, quin<strong>di</strong> ad una <strong>di</strong>stanza x sufficientementegrande d<strong>al</strong> bordo gli sforzi e le deformazioni dovranno annullarsi(come abbiamo già visto nel Cap. 2).Ne consegue che i termini in e βx <strong>del</strong>la soluzione gener<strong>al</strong>e (7.23) dovranno essereessere nulli e quin<strong>di</strong> C 1 = C 2 = 0. La soluzione sarà quin<strong>di</strong> rappresentata dasinusoide e cosinusoide smorzate:la cui lunghezza d’onda è:w = e −βx (C 3 cos (βx) + C 4 sin (βx)) (7.31)λ = 2π ββ viene detto coefficiente <strong>di</strong> smorzamento:β =√4 3 (1 − ν2 )√sR(7.32)con ν = 0.33 assume il v<strong>al</strong>ore:β ∼ = 1.285 √sREsempio 7.1 Ad esempio, assumendo 2R = <strong>10</strong>s (piccolo spessore) si ottiene:β = 0.575s117
Per βx = π:x = π β =πs ≈ 1.74πs = 5.47s0.575e −π = 0.043quin<strong>di</strong> già ad una <strong>di</strong>stanza pari a metà lunghezza d’onda gli spostamenti sono <strong>di</strong> dueor<strong>di</strong>ni <strong>di</strong> grandezza inferiori rispetto a quelli <strong>del</strong>le estremità caricate <strong>del</strong> bordo.Ad una <strong>di</strong>stanza βx = 2π il termine e −βx <strong>di</strong>venta e −2π = 0.0019 e gli spostamentisono <strong>di</strong> tre or<strong>di</strong>ni <strong>di</strong> grandezza inferiori rispetto <strong>al</strong> bordo.Supponendo che vi sia solo M 0 :M x = −E ∂ 2 w(1 − ν 2 ) 12 ∂x 2 = E(1 − ν 2 )Per x = 0:s 3s 312 β2 e −βx (−2C 3 sin (βx) + 2C 4 cos (βx))(7.33)EM x (x = 0) =(1 − ν 2 ) 12 β2 2C 4 = M 0 (7.34)Per determinare il v<strong>al</strong>ore <strong>di</strong> C 3 , ricordando l’eq.(7.6):s 3C 4 = 12 ( 1 − ν 2)2Es 3 β 2 M 0 (7.35)T x = −E(1 − ν 2 ) 12 2β3 e −βx ((C 4 − C 3 ) sin (βx) + (C 4 + C 3 ) cos (βx)) (7.36)s 3da cui, imponendo che per x = 0 sia T = 0:si ottiene:T x (x = 0) = −E(1 − ν 2 ) 12 2β3 (C 3 + C 4 ) = 0 (7.37)Gli spostamenti e le azioni sulla lastra risultano:s 3C 3 = −C 4 = − 12 ( 1 − ν 2)2Es 3 β 2 M 0 (7.38)w [M0] = 6 ( 1 − ν 2)Es 3 β 2 e −βx M 0 (−cos (βx) + sin (βx)) (7.39)M x[M0] = M 0 e −βx (sin (βx) + cos (βx)) (7.40)T x[M0] = −2βM 0 e −βx sin (βx) (7.41)118
Esempio 7.2 Considerando ancora un cilindro con 2R = <strong>10</strong>s ed s = <strong>10</strong> mm soggettoad una coppia M 0 = <strong>10</strong>0 [Nmm/mm], c<strong>al</strong>colare le azioni interne nel tubo e gli sforzi.Applicando la (7.40) e la (7.41) è facile ottenere l’andamento lungo il tubo <strong>del</strong>le azionisulla lastra. E’ facile verificare come i punti <strong>di</strong> stazionarietà <strong>di</strong> M x si ottengano perβx = 0 e βx = π, ovvero i punti nei qu<strong>al</strong>i T x è nullo.<strong>10</strong>06M x! " m80T x5! x! " f604340220<strong>10</strong>0−200 <strong>10</strong> 20 30 40 50 60 70 80 90 <strong>10</strong>0x [mm](a)−<strong>10</strong> <strong>10</strong> 20 30 40 50 60 70 80 90 <strong>10</strong>0x [mm](b)Figura 7.7: Cilindro con momento su un bordo: a) azioni interne sulla lastra; b)sforzi <strong>al</strong>l’intradosso.Lo stato <strong>di</strong> sforzo sull’intradosso (dove il contributo <strong>di</strong> M x è positivo) è facilmentec<strong>al</strong>colabile:σ x,M = 6Mxs 2 σ ϕ,f = ν · σ x,M σ ϕ = −E w RI <strong>di</strong>versi termini sono riportati in Fig. 7.7: va annotato come gli sforzi sull’estradosso(per la sola componente flession<strong>al</strong>e) vadano c<strong>al</strong>colati con il segno negativo rispetto <strong>al</strong>lerelazioni soprascritte.Considerando ora il caso che vi sia solo T 0 , imponendo la con<strong>di</strong>zione x = 0 nelledue eq.(7.33) e (7.37) si ottiene:e:s 3M x (x = 0) = 0 =⇒E(1 − ν 2 ) 12 β2 (2C 4 ) = 0 =⇒ C 4 = 0 (7.42)T x (x = 0) = T 0 =⇒ −E s 36 ( 1 − ν 2)(1 − ν 2 ) 12 β3 C 3 = T 0 =⇒ C 3 = −T 0Es 3 β 3 (7.43)Spostamenti ed azioni sulla lastra dovute a T 0 risultano quin<strong>di</strong>:w [T0] = − 6 ( 1 − ν 2)Es 3 β 3 T 0 e −βx cos (βx) (7.44)119
M x[T0] = T 0β e−βx sin (βx) (7.45)T x[T0] = −T 0 e −βx (sin (βx) − cos (βx)) (7.46)Esempio 7.3 Considerando ancora un cilindro con 2R = <strong>10</strong>s ed s = <strong>10</strong> mm soggettoad una forza ra<strong>di</strong><strong>al</strong>e T 0 = <strong>10</strong> [N/mm], c<strong>al</strong>colare le azioni interne nel tubo e gli sforzi<strong>al</strong>l’intradosso.606M x! " m50T x5! x! " f404303202<strong>10</strong><strong>10</strong>0−<strong>10</strong>0 <strong>10</strong> 20 30 40 50 60 70 80 90 <strong>10</strong>0x [mm](a)−<strong>10</strong> <strong>10</strong> 20 30 40 50 60 70 80 90 <strong>10</strong>0x [mm](b)Figura 7.8: Cilindro con forza ra<strong>di</strong><strong>al</strong>e su un bordo: a) azioni interne sulla lastra;b) sforzi <strong>al</strong>l’intradosso.In complesso, in presenza sia <strong>di</strong> M 0 sia <strong>di</strong> T 0 :w = 6 ( 1 − ν 2)Es 3 β 2 e −βx [M 0 (−cos (βx) + sin (βx)) − T 0β cos (βx) ](7.47)∂w∂x = 6 ( 1 − ν 2)Es 3 β 2 e −βx [2βM 0 cos (βx) + T 0 (cos (βx) + sin (βx))] (7.48)M x = e −βx [M 0 (sin (βx) + cos (βx)) + T 0β sin (βx) ](7.49)T x = e −βx [−2βM 0 sin (βx) − T 0 (sin (βx) − cos (βx))] (7.50)La derivata ∂w/∂x rappresenta la rotazione <strong>del</strong> bordo cui vengono applicate leazioni: con le convenzioni prese per w ed x, la rotazione è positiva se <strong>di</strong>retta insenso orario.120
7.2.1 Coefficienti <strong>di</strong> bordoGli effetti <strong>di</strong> M 0 e T 0 li possiamo trattare con dei coefficienti che <strong>di</strong>ano spostamentie rotazioni per effetto <strong>di</strong> forze e coppie unitarie. In particolare c<strong>al</strong>colandogli spostamenti e le derivate prime in x = 0:w M = − 12β 2 Dw T = − 12β 3 Ddw Mdx = θ M = 1βDθ T = 12β 2 D(7.51)(7.52)(7.53)(7.54)Va annotato come i termini misti dovrebbero essere ugu<strong>al</strong>i per il Th. <strong>di</strong> Maxwell,in re<strong>al</strong>tà il segno è <strong>di</strong>scorde perché abbiamo preso il verso <strong>di</strong> T <strong>di</strong>scorde con w.I coefficienti <strong>di</strong> bordo inoltre sod<strong>di</strong>sfano questa relazione:w T · θ M = 2 · w M · θ T (7.55)7.3 Applicazioni7.3.1 Forza ra<strong>di</strong><strong>al</strong>e su un par<strong>al</strong>leloC<strong>al</strong>coliamo le azioni che nascono su un tubo che venga ‘premuto’ su un par<strong>al</strong>leloda una forza ra<strong>di</strong><strong>al</strong>e P .Figura 7.9: Tubo lungo premuto da una forza ra<strong>di</strong><strong>al</strong>e P lungo un par<strong>al</strong>lelo.Una striscia <strong>del</strong> cilindro, lungo la generatrice, è come una trave caricata sull’asse<strong>di</strong> simmetria: la forza P si ripartisce egu<strong>al</strong>mente sulle due metà <strong>del</strong> cilindro epossiamo mettere in evidenza un momento iperstatico M, come visibile in Figura7.<strong>10</strong>.121
Figura 7.<strong>10</strong>: Sezione <strong>del</strong> cilindro nella zona <strong>di</strong> applicazione <strong>del</strong>la forza P .Avendo <strong>di</strong>viso il problema in due cilindri, uniti per un bordo, possiamo usarei coefficienti <strong>di</strong> bordo. Il momento M deve essere t<strong>al</strong>e da ‘riportare’ a zerol’angolo che la lastra forma per effetto <strong>di</strong> P/2. In particolare:1βD M − P 12 2β 2 D = 0 =⇒ M = P 4β = P/22β(7.56)Lo spostamento <strong>del</strong> tubo sotto l’azione <strong>di</strong> P può essere c<strong>al</strong>colato ancora con icoefficienti <strong>di</strong> bordo, sotto l’azione <strong>di</strong> M e P/2:w| x=0 = − P 4β12β 2 D + P 212β 3 D =⇒ w| x=0 =P8β 3 D(7.57)7.3.2 Vincolo ra<strong>di</strong><strong>al</strong>e su un tuboSi abbia un tubo soggetto ad una pressione interna p, vincolato a non espandersira<strong>di</strong><strong>al</strong>mente su un par<strong>al</strong>lelo. C<strong>al</strong>colare lo stato <strong>di</strong> sforzo.(a)(b)Figura 7.11: Cilindro in pressione vincolato su un par<strong>al</strong>lelo: a) problema; b)schematizzazione.C<strong>al</strong>coliamo, con i concetti <strong>del</strong> metodo <strong>del</strong>le forze, la forza T che ‘riporta’ a zerolo spostamento ra<strong>di</strong><strong>al</strong>e <strong>del</strong> par<strong>al</strong>lelo vincolato, quando il cilindro è soggetto <strong>al</strong>lapressione interna.T18β 3 D − pR22p= 0 =⇒ T =Es β(7.58)122
Il momento M si ricava d<strong>al</strong>la soluzione già vista per la lastra caricata su unpar<strong>al</strong>lelo.M =p2β 2 (7.59)Si poteva arrivare <strong>al</strong>la stessa soluzione cercando le forze T 0 e M 0 da applicare<strong>al</strong> bordo <strong>di</strong> un tubo per impe<strong>di</strong>re lo spostamento ra<strong>di</strong><strong>al</strong>e (per il vincolo) e larotazione (per la simmetria).{1βD M 0 + 12β 2 D T 0 = 0− 12β 2 D M 0 − 12β 3 D T 0 −p4β 4 D = 0 (7.60)Notare che T 0 ha verso <strong>di</strong>verso rispetto a T <strong>del</strong>la soluzione precedente.M 0 =p2β 2T 0 = − p β(7.61)Ovviamente la soluzione trovata fa sì che lo spostamento ra<strong>di</strong><strong>al</strong>e <strong>del</strong> par<strong>al</strong>lelosia nullo:w| x=0 = − 1 (2β 3 β pD 2β 2 − p )−pβ 4β 4 D = 0 (7.62)Lo spostamento risulta:w(x) = e−βx2β 3 D[β p2β 2 (sin (βx) − cos (βx)) + p β cos (βx) ]−p4β 4 D(7.63)<strong>di</strong> cui l’ultimo termine corrisponde <strong>al</strong>l’integr<strong>al</strong>e particolare. Il momento M xv<strong>al</strong>e:[ pM x = e −βx 2β 2 (sin (βx) + cos (βx)) − p ]β 2 sin (βx) (7.64)Esempio 7.4 Considerando un cilindro con R = 200 [mm] ed s = <strong>10</strong> mm soggetto aduna pressione interna p = 15 [N/mm 2 ] che è impe<strong>di</strong>to <strong>di</strong> spostarsi ra<strong>di</strong><strong>al</strong>mente su unpar<strong>al</strong>lelo, c<strong>al</strong>colare gli sforzi <strong>al</strong>l’intradosso <strong>del</strong> tubo.Applicando le relazioni trovate si ottengono dapprima w ed M x (è presente anche ilmomento anticlastico M ϕ = νM x), gli sforzi risultano:σ x = 6Mxs 2 σ ϕ,f = ν · σ x,m σ ϕ,m = −E w RL’andamento degli sforzi rappresentato in Fig. 7.12. V<strong>al</strong> la pena notare come nellasezione <strong>di</strong> mezzeria, essendo impe<strong>di</strong>to lo spostamento ra<strong>di</strong><strong>al</strong>e, lo sforzo σ ϕ,m = 0.La seconda osservazione che si può fare è che lo sforzo circonferenzi<strong>al</strong>e membran<strong>al</strong>epuò essere anche c<strong>al</strong>colato come:σ ϕ,m = − E R w(M0, T0) + pR s(7.65)ovvero come somma <strong>del</strong> contributo dovuto <strong>al</strong>lo spostamento indotto d<strong>al</strong>le iperstatichee <strong>del</strong> contributo dovuto <strong>al</strong>lo sforzo <strong>di</strong> Mariotte.123
600! " m500400! x! " f300!200<strong>10</strong>00−<strong>10</strong>0−2000 50 <strong>10</strong>0 150 200 250 300x [mm]Figura 7.12: Sforzi <strong>al</strong>l’intradosso <strong>del</strong> tubo, con una pressione interna p =15 [MP a], la cui espansione è impe<strong>di</strong>ta su un par<strong>al</strong>lelo.Si può facilmente vedere come lo sforzo σ ϕ,m sia massimo per βx = π = <strong>10</strong>9.3 [mm].Per βx = 2π gli effetti <strong>di</strong> bordo sono trascurabili: per x > 2π/β il cilindro non risente<strong>del</strong>la presenza <strong>del</strong> vincolo (lo stato <strong>di</strong> sforzo e deformazione corrisponde ai soli effetti<strong>del</strong>la pressione interna) e si comporta come un cilindro <strong>di</strong> lunghezza indefinita.7.3.3 Cerchiatura <strong>del</strong> tuboSi abbia un tubo soggetto ad una pressione p, rinforzato su un par<strong>al</strong>lelo da unanello <strong>di</strong> sezione trasvers<strong>al</strong>e A (supponiamo la sezione sufficientemente strettada immaginare che i due corpi si scambino azioni su un par<strong>al</strong>lelo): vogliamoc<strong>al</strong>colare lo stato <strong>di</strong> sforzo.Risolvendo con il metodo <strong>del</strong>le forze, il problema è ricercare la forza ra<strong>di</strong><strong>al</strong>eT che si scambiano anello e cilindro, imponendo che i due corpi abbiano lostesso spostamento ra<strong>di</strong><strong>al</strong>e. Conosciamo già la cedevolezza <strong>del</strong> tubo premutora<strong>di</strong><strong>al</strong>mente, dobbiamo c<strong>al</strong>colare quella <strong>del</strong>la trave anulare 4 .Considerando la trave anulare soggetta ad una forza ra<strong>di</strong><strong>al</strong>e T , la trave risultasoggetta (facendo l’equilibrio ra<strong>di</strong><strong>al</strong>e su un semi-anello) ad un’azione assi<strong>al</strong>e N4 La schematizzazione a trave è corretta se l’<strong>al</strong>tezza <strong>del</strong>l’anello è piccola, <strong>al</strong>trimenti l’anelloandrebbe schematizzato come un <strong>di</strong>sco forato124
ATp(a)(b)Figura 7.13: Cilindro in pressione rinforzato su un par<strong>al</strong>lelo: a) problema; b)schematizzazione con il metodo <strong>del</strong>le forze.che genera uno sforzo circonferenzi<strong>al</strong>e σ ϕ :N = T · R ⇒ σ ϕ = T · RAPoichè la deformazione circonferenzi<strong>al</strong>e è ɛ ϕ = u/R, lo spostamento ra<strong>di</strong><strong>al</strong>e chesubisce l’anello risulta:u = T · R2(7.66)E · AScrivendo l’equazione <strong>di</strong> congruenza (spostamento cilindro = spostamento anello)si ottiene:T ·18β 3 D − p · R24β 4 = −TD E · A(7.67)da cui con <strong>al</strong>cuni semplici passaggi (ricordando che 4β 4 D = Es/R 2 ) si ottiene:( βT2 A)+ s = pda cui:T =pβ2 + s A(7.68)V<strong>al</strong> la pena notare come se A → ∞, <strong>al</strong>lora T = 2p/β (come nel caso <strong>del</strong> vincolora<strong>di</strong><strong>al</strong>e sul par<strong>al</strong>lelo), mentre se A → 0 <strong>al</strong>lora T → 0.Esempio 7.5 Considerando un cilindro con R = 200 [mm] ed s = <strong>10</strong> [mm] soggettoad una pressione interna p = 15 [N/mm 2 ] su cui è s<strong>al</strong>dato un anello avente sezione20 × 50 [mm], c<strong>al</strong>colare gli sforzi <strong>al</strong>l’intradosso <strong>del</strong> tubo e lo sforzo assi<strong>al</strong>e sul rinforzo.Applicando le formule precedenti si ottiene T = 615.47 [N/mm], da cui si ricavanole azioni applicate sul bordo <strong>del</strong> cilindro nella sezione <strong>di</strong> mezzeria: M 0 = T/4β eT 0 = −T/2. Lo spostamento w ed M x dovuto <strong>al</strong>le iperstatiche si c<strong>al</strong>colano quin<strong>di</strong>semplicemente con la (7.47) e la (7.49). Lo sforzo circonferenzi<strong>al</strong>e me<strong>di</strong>o si c<strong>al</strong>cola125
quin<strong>di</strong> in modo semplice con la (7.65). In particolare gli sforzi sono rappresentati nellaFig. 7.14 : lo sforzo circonferenzi<strong>al</strong>e me<strong>di</strong>o in x = 0 risulta meno <strong>del</strong> 50% <strong>del</strong>lo sforzo<strong>di</strong> Mariotte nel cilindro semplice.Lo sforzo nell’anello risulta: σ ϕ,an = 123.1 [MP a]: è da notare che t<strong>al</strong>e v<strong>al</strong>orecorrisponde <strong>al</strong>lo sforzo circonferenzi<strong>al</strong>e membran<strong>al</strong>e nel tubo.350300250200! " m! x! " f150!<strong>10</strong>0500−50−<strong>10</strong>00 50 <strong>10</strong>0 150 200 250 300x [mm]Figura 7.14: Sforzi <strong>al</strong>l’intradosso <strong>di</strong> un tubo (R = 200 [mm], s = <strong>10</strong> [mm])rinforzato con un anello <strong>di</strong> <strong>di</strong>mensioni 20 × 50 [mm] soggetto ad una pressioneinterna p = 15 [MP a].Come si vede d<strong>al</strong>l’esempio precedente, la cerchiatura provoca una drasticariduzione <strong>del</strong>lo sforzo σ ϕ,m nel tubo. Questo è il principio su cui funzionano lecondotte cerchiate, su cui vengono messi degli anelli equispaziati, per ridurre losforzo nel tubo e permettere <strong>al</strong>la tubazione <strong>di</strong> assorbire sovrapressioni e colpid’ariete (in questo modo si risparmia materi<strong>al</strong>e rispetto ad una condotta <strong>di</strong>spessore uniforme). Nelle re<strong>al</strong>i applicazioni gli anelli vengono forzati sul tubo peragevolare il collegamento meccanico e precaricare in compressione la condotta.La <strong>di</strong>stanza tra gli anelli in una cerchiatura re<strong>al</strong>e deve essere minore <strong>del</strong>lametà <strong>di</strong> λ = 2π/β <strong>al</strong>trimenti l’effetto benefico si limita a brevi zone sotto ciascuncerchio [11].7.4 Recipienti cilindriciLa risoluzione <strong>del</strong>la giunzione tra lastre cilindriche ed <strong>al</strong>tri elementi (travi adanello, fon<strong>di</strong> piani, fon<strong>di</strong> sferici) tramite il metodo <strong>del</strong>le forze, come visto nelle126
applicazioni precedenti, permette <strong>di</strong> trovare lo stato <strong>di</strong> sforzo presente nei recipientiin pressione. Avendo già an<strong>al</strong>izzato fon<strong>di</strong> piani e travi ad anello, nelseguito si esaminano i coefficienti elastici e lo stato <strong>di</strong> sforzo nelle fon<strong>di</strong> (cupole)sferici, per poi c<strong>al</strong>colare lo stato <strong>di</strong> sforzo in un recipiente a spessore costantesoggetto a pressione interna7.4.1 Fon<strong>di</strong> sfericiConsideriamo una porzione <strong>di</strong> fondo sferico <strong>di</strong> raggio R e spessore s ed in<strong>di</strong>chiamocon ω f l’angolo che il fondo forma con il piano che contiene il bordo.Si <strong>di</strong>mostra che sotto l’azione <strong>di</strong> forze ra<strong>di</strong><strong>al</strong>i T unitarie applicate <strong>al</strong> bordo, glispostamenti risultano [11]:w T = − sin2 ω f2β 3 Dθ T = sin2 ω f2β 2 D(7.69)e che per effetto <strong>di</strong> coppie M unitarie risultano:w M = − sin2 ω f2β 2 Dθ M = sin2 ω fβD(7.70)Osservando le equazioni precedenti, si osserva facilmente che per ω fcoefficienti <strong>di</strong> bordo sono quin<strong>di</strong> ugu<strong>al</strong>i a quello <strong>di</strong> un cilindro lungo.= 90 iTMRω fFigura 7.15: Applicazione <strong>di</strong> forze <strong>al</strong> bordo <strong>di</strong> una porzione <strong>di</strong> fondo sferico.Considerando il fondo sferico soggetto <strong>al</strong>la pressione p, gli sforzi membran<strong>al</strong>i(ugu<strong>al</strong>i lungo lungo i meri<strong>di</strong>ani e lungo i par<strong>al</strong>leli) presenti sono:σ ϕ = − pR2s(7.71)127
con le stesse convenzioni <strong>di</strong> segno già assunte per i cilindri (pressione positivase agente sulla superficie esterna). Nella risoluzione dei problemi andrà quin<strong>di</strong>tenuto in conto che lo spostamento ra<strong>di</strong><strong>al</strong>e <strong>del</strong> fondo, ricavabile dagli sforzimembran<strong>al</strong>i, è <strong>di</strong>verso da quello <strong>del</strong> mantello cilindrico.7.4.2 Recipiente con fon<strong>di</strong> semisfericiConsideriamo un recipiente cilindrico <strong>di</strong> raggio R e spessore s con fon<strong>di</strong> semisferici<strong>di</strong> ugu<strong>al</strong>e spessore, soggetto <strong>al</strong>la pressione interna p. Per effetto <strong>del</strong>laTMTMppFigura 7.16: Forze che si sviluppano <strong>al</strong>la giunzione fondo-cilindro <strong>di</strong> un recipientein pressione.pressione interna le deformazioni circonferenzi<strong>al</strong>i nei due corpi (cilindro e fondo)sono rispettivamente:ɛ ϕ,c = 1 EpR(2 − ν)2s ɛϕ,f = 1 EGli spostamenti ra<strong>di</strong><strong>al</strong>i (essendo ɛ ϕ = u/R) sono:u c = 1 EpR 2(2 − ν)2s uf = 1 EpR(1 − ν) (7.72)2spR 2(1 − ν) (7.73)2sNascono quin<strong>di</strong> <strong>del</strong>le azioni iperstatiche M e T che ristabiliscono la congruenza<strong>del</strong>le deformazioni tra i corpi. In particolare, scrivendo la prima equazione <strong>di</strong>congruenza degli spostamenti angolari:1βD M − 12β 2 D T = − 1βD M − 12β 2 D T (7.74)128
da cui si ottiene M = 0 (ciò è dovuto <strong>al</strong> fatto che T genera <strong>del</strong>le rotazioni ugu<strong>al</strong>isui due corpi e non è quin<strong>di</strong> ulteriormente necessario M). D<strong>al</strong>la congruenzadegli spostamenti ra<strong>di</strong><strong>al</strong>i (sapendo già che M = 0):12β 3 D T − 1 EpR 21(2 − ν) = −2s 2β 3 D T − 1 EpR 2(1 − ν) (7.75)2sda cui si ricava:T = p(7.76)8βGli sforzi si ricavano quin<strong>di</strong> d<strong>al</strong>le (7.47) ed (7.49) (nelle qu<strong>al</strong>i T 0 = −T per laconvenzione <strong>di</strong> Fig. 7.16 contraria a quelle che avevamo assunto per gli effetti<strong>di</strong> bordo). In particolare:M x = − p8β 2 e−βx sin βxT x = p8β e−βx (sin βx − cos βx)Il massimo <strong>di</strong> M x si raggiunge quando T x = 0, ovvero per βx = π 4. In corrispondenza<strong>di</strong> t<strong>al</strong>e <strong>di</strong>stanza lo sforzo σ x,f è massimo (il segno negativo <strong>di</strong> M xsignifica che sono tese le fibre <strong>al</strong>l’estradosso) a cui va sommato lo sforzo membran<strong>al</strong>eσ x,m = pR/2s. In particolare lo sforzo massimo <strong>al</strong>l’estradosso <strong>del</strong> cilindrorisulta:σ x,max = σ x,f,max + σ x,m =t<strong>al</strong>e v<strong>al</strong>ore è circa pari a 1.29 · σ x,m .3 √ 2R8s √ 3(1 − ν 2 ) e−π/4 p + pR2s(7.77)Esempio 7.6 Considerando un recipiente cilindrico a fon<strong>di</strong> semisferici con R = 200 [mm]ed s = <strong>10</strong> [mm] soggetto ad una pressione interna p = 15 [N/mm 2 ], c<strong>al</strong>colare gli sforzisul mantello cilindrico.D<strong>al</strong>la (7.76) ricaviamo T 0 = −65.23 [N/mm] e possiamo rappresentare gli sforzi in Fig.7.17. Va annotato come il c<strong>al</strong>colo <strong>del</strong>lo sforzo membran<strong>al</strong>e circonferenzi<strong>al</strong>e, poichèsiamo in un caso in cui N x ≠ 0, può essere fatto solo attraverso la (7.65): la ragionesta nel fatto che lo spostamento ra<strong>di</strong><strong>al</strong>e <strong>del</strong> mantello cilindrico (a causa <strong>del</strong>la presenza<strong>del</strong>lo sforzo assi<strong>al</strong>e) non è più descritto d<strong>al</strong>la (7.28).7.4.3 Altri recipientiLa soluzione vista prima per il recipiente con fon<strong>di</strong> semisferici (M 0 = 0) v<strong>al</strong>esolo per il caso <strong>di</strong> cilindro e fon<strong>di</strong> aventi medesimo spessore. In tutti gli <strong>al</strong>tricasi (o nel caso <strong>di</strong> giunzioni con <strong>al</strong>tri elementi qu<strong>al</strong>i travi ad anello o fon<strong>di</strong> piani)le due equazioni <strong>di</strong> congruenza formano un sistema 2 × 2 da cui si ricavano leazioni iperstatiche M 0 e T 0 .129
350300! ",m250! ",i! ",e200! x,i!! x,e150<strong>10</strong>05000 50 <strong>10</strong>0 150 200 250 300x [mm]Figura 7.17: Sforzi <strong>al</strong>l’intradosso <strong>di</strong> un recipiente cilindrico (R = 200 [mm], s =<strong>10</strong> [mm] costante) con fon<strong>di</strong> semisferici, soggetto ad una pressione interna p =15 [MP a].7.5 EserciziEsercizio 7.1 C<strong>al</strong>colare gli spostamenti e la <strong>di</strong>stribuzione <strong>di</strong> sforzi in un tubo pereffetto <strong>di</strong> un sistema <strong>di</strong> coppie applicate lungo un par<strong>al</strong>lelo (è il du<strong>al</strong>e <strong>del</strong>la forzara<strong>di</strong><strong>al</strong>e sul par<strong>al</strong>lelo). Perchè σ ϕ.m deve risultare nullo in corrispondenza <strong>del</strong> par<strong>al</strong>lelo<strong>di</strong> applicazione <strong>del</strong>le forze ?Esercizio 7.2 Perchè in un tubo cerchiato lo sforzo circonferenzi<strong>al</strong>e sul tubo è pari aquello sull’anello ?Esercizio 7.3 C<strong>al</strong>colare la <strong>di</strong>stribuzione <strong>di</strong> sforzi nel mantello cilindrico <strong>di</strong> un recipientea fon<strong>di</strong> chiusi (R = <strong>10</strong>0 [mm] e s = <strong>10</strong> [mm]), rinforzato da un anello 50 ×20 [mm] soggetto ad una pressione <strong>di</strong> 300 bar.130
Parte IIIApplicazioni ed organi <strong>di</strong>macchina131
Capitolo 8Fatica degli elementi s<strong>al</strong>datiSi espongono i concetti fondament<strong>al</strong>i <strong>del</strong>le verifiche a fatica degli elementi s<strong>al</strong>dati <strong>al</strong>la luce<strong>del</strong>le vigenti normative, insieme con una descrizione <strong>del</strong>le verifiche basate sul concetto <strong>di</strong>hot-spot. Per un quadro più completo, si accenna quin<strong>di</strong> <strong>al</strong>la propagazione <strong>di</strong> <strong>di</strong>fetti ed aimeto<strong>di</strong> per incrementare la resistenza a fatica <strong>di</strong> un giunto s<strong>al</strong>dato 1 .8.1 Introduzione <strong>al</strong>la resistenza a fatica dei giuntis<strong>al</strong>datiLa s<strong>al</strong>datura è una tecnica <strong>di</strong> giunzione <strong>di</strong> materi<strong>al</strong>i, solitamente met<strong>al</strong>li, perco<strong>al</strong>escenza. Ciò si ottiene provocando la fusione loc<strong>al</strong>e <strong>del</strong>le parti da collegare,eventu<strong>al</strong>mente con l’aggiunta <strong>di</strong> materi<strong>al</strong>e d’apporto. In questo modo si formauna mescolanza <strong>di</strong> materi<strong>al</strong>e fuso che, una volta raffreddato, costituisce unagiunzione resistente. Le fonti <strong>di</strong> energia per la s<strong>al</strong>datura possono essere unafiamma a gas, un arco elettrico, un laser o un fascio <strong>di</strong> elettroni. A s<strong>al</strong>daturaavvenuta, nella zona <strong>di</strong> s<strong>al</strong>datura si possono riconoscere un certo numero <strong>di</strong> zone<strong>di</strong>stinte.Figura 8.1: S<strong>al</strong>datura e zona termicamente <strong>al</strong>terataLa s<strong>al</strong>datura vera e propria è la cosiddetta zona fusa (dove è stato eventu<strong>al</strong>mente<strong>di</strong>sposto il materi<strong>al</strong>e d?apporto). Le proprietà <strong>del</strong>la zona fusa <strong>di</strong>pendono1 a cura <strong>di</strong> A. Bernasconi e M. Filippini132
Figura 8.2: configurazioni tipiche dei giunti s<strong>al</strong>datiessenzi<strong>al</strong>mente d<strong>al</strong> materi<strong>al</strong>e d?apporto utilizzato e d<strong>al</strong>la sua compatibilità conil materi<strong>al</strong>e base. La circonda la zona termicamente <strong>al</strong>terata, fatta <strong>di</strong> materi<strong>al</strong>ebase la cui microstruttura e le cui proprietà sono state <strong>al</strong>terate d<strong>al</strong> processo <strong>di</strong>s<strong>al</strong>datura (si veda il profilo <strong>di</strong> durezza in corripsondenza <strong>del</strong>la zona termicamente<strong>al</strong>terata in Figura 8.1). In questa zona si sviluppano le tensioni residue cheverranno descritte nel seguito.I giunti s<strong>al</strong>dati si classificano in base <strong>al</strong>la geometria e <strong>al</strong>la <strong>di</strong>sposizione deilembi <strong>del</strong>le lamiere che vengono collegate tra loro. In Figura 8.2 sono riportatele configurazioni più <strong>di</strong>ffuse:1. giunto <strong>di</strong> testa (butt joint)2. giunto <strong>di</strong> testa con preparazione (single V butt joint)3. giunto a sovrapposizione (lap joint)4. giunto a T (T-butt weld)La preparazione consiste in una lavorazione dei lembi da s<strong>al</strong>dare atta a favorirela <strong>di</strong>sposizione <strong>del</strong> materi<strong>al</strong>e d’apporto in modo t<strong>al</strong>e da ottenere la completapenetrazione, cioè il completo ripristino <strong>del</strong>la sezione resistente.Come si può vedere in Figura 8.3, la presenza <strong>di</strong> una s<strong>al</strong>datura mo<strong>di</strong>fica lacurva S-N <strong>di</strong> un acciaio in misura molto più gravosa <strong>di</strong> un semplice intaglio, conun abbassamento <strong>del</strong> limite <strong>di</strong> fatica e un incremento <strong>del</strong>la pendenza <strong>del</strong>la curvastessa. La presenza <strong>di</strong> s<strong>al</strong>dature riduce la resistenza a fatica <strong>di</strong> un componenteessenzi<strong>al</strong>mente per le seguenti ragioni:133
Figura 8.3: Confronto tra le curve S-N <strong>del</strong> materi<strong>al</strong>e base, intagliato e s<strong>al</strong>datoFigura 8.4: Posizione <strong>del</strong> piede e <strong>del</strong>la ra<strong>di</strong>ce <strong>di</strong> una s<strong>al</strong>datura• concentrazione <strong>di</strong> sforzi dovuta <strong>al</strong>la forma <strong>del</strong>la s<strong>al</strong>datura e <strong>al</strong>la geometria<strong>del</strong> giunto;• concentrazione <strong>di</strong> sforzi causata dai <strong>di</strong>fetti <strong>di</strong> s<strong>al</strong>datura;• sforzi residui introdotti durante la s<strong>al</strong>datura.I punti <strong>di</strong> possibile nucleazione <strong>di</strong> fratture si trovano solitamente in corrispondenza<strong>del</strong> piede <strong>del</strong> cordone, <strong>del</strong>la base <strong>del</strong>la s<strong>al</strong>datura (ra<strong>di</strong>ce, secondo laterminologia <strong>di</strong> Figura 8.4), o nei punti <strong>di</strong> interruzione <strong>del</strong> cordone nel caso <strong>di</strong>sladature <strong>di</strong>scontinue o interrotte.La geometria loc<strong>al</strong>e <strong>di</strong> un cordone <strong>di</strong> s<strong>al</strong>datura è variabile da punto a puntoe si <strong>di</strong>scosta d<strong>al</strong>la geometria nomin<strong>al</strong>e per la forma (non necessariamente triangolare)e per la presenza <strong>di</strong> sporgenze e rientranze non sempre riconducibili araggi <strong>di</strong> raccordo. Quanto anche sia possibile riconoscere dei dettagli geometriciassimilabili a raggi <strong>di</strong> raccordo, i v<strong>al</strong>ori presentano un’elevata <strong>di</strong>spersione <strong>al</strong> variare<strong>del</strong>la posizione lungo il cordone lungo il qu<strong>al</strong>e si effettuano i rilievi. A titolo<strong>di</strong> esempio, in Figura 8.5 è riportata la micrografia <strong>di</strong> una sezione trasvers<strong>al</strong>e<strong>di</strong> una s<strong>al</strong>datura su cui sono stati rilevati i raggi <strong>di</strong> raccordo e il grafico con la134
<strong>di</strong>stribuzione dei raggi <strong>di</strong> raccordo misurati . I <strong>di</strong>fetti presenti in una s<strong>al</strong>daturaFigura 8.5: Rilievo dei raggi <strong>di</strong> raccordo in una sezione trasvers<strong>al</strong>e <strong>di</strong> un cordone<strong>di</strong> s<strong>al</strong>datura e <strong>di</strong>stribuzione dei v<strong>al</strong>ori <strong>di</strong> raggio rilevati [13].sono <strong>di</strong> <strong>di</strong>verso tipo (in Figura 8.6 sono rappresentati i <strong>di</strong>fetti più ricorrenti)e sono provocati da meccanismi essenzi<strong>al</strong>mente riconducibili <strong>al</strong>la successione <strong>di</strong>risc<strong>al</strong>damento e rapido raffreddamento, nonché <strong>al</strong>la deposizione <strong>di</strong> materi<strong>al</strong>e <strong>di</strong>apporto. Per in<strong>di</strong>viduare i <strong>di</strong>fetti le s<strong>al</strong>dature sono soggette a controlli non <strong>di</strong>struttivi(ra<strong>di</strong>ografie, ultrasuoni) e pertanto ill livello e la qu<strong>al</strong>ità <strong>del</strong> controllocontribuisce a determinare i v<strong>al</strong>ori degli sforzi ammissibili.Figura 8.6: Difetti tipici presenti in una s<strong>al</strong>datura.Gli sforzi residui si sviluppano in corrispondenza <strong>del</strong>la s<strong>al</strong>datura per effetto<strong>del</strong>la contrazione <strong>del</strong> materi<strong>al</strong>e fuso durante il raffreddamento, che viene inparte contrastata d<strong>al</strong> materi<strong>al</strong>e base che, avendo raggiunto una temperaturainferiore, ha subito una deformazione inizi<strong>al</strong>e inferiore. Come tutte le tensioniresidue, anche quelle derivanti d<strong>al</strong> processo <strong>di</strong> s<strong>al</strong>datura sono autoequilibrate(cioè la risultane <strong>del</strong>le forze ad essi associate è nulla). La <strong>di</strong>stribuzione tipica <strong>di</strong>queste tensioni è mostrata in Figura 8.7, dove si può osservare che è presenteuna componente <strong>di</strong> trazione residua che si estende per un lungo trato lungo il135
cordone <strong>di</strong> s<strong>al</strong>datura. Queste tensioni residue possono raggiungere v<strong>al</strong>ori moltoelevati, <strong>del</strong>l’or<strong>di</strong>ne <strong>di</strong> grandezza <strong>del</strong>lo snervamento <strong>del</strong> materi<strong>al</strong>e base. Le tensioniresidue possono essere ridotte o eliminate me<strong>di</strong>ante trattamenti termici <strong>di</strong><strong>di</strong>stensione.Figura 8.7: Distribuzione degli sforzi residui in una s<strong>al</strong>daturaIn gener<strong>al</strong>e per v<strong>al</strong>utare correttamente la resistenza <strong>di</strong> una s<strong>al</strong>datura, si deveadeguatamente tenere conto complessivamente <strong>di</strong> tutti i seguenti parametri:• ampiezza degli sforzi applicati;• livello caratteristico degli sforzi me<strong>di</strong> e sforzi residui indotti d<strong>al</strong> processo;• concentrazione <strong>di</strong> sforzi causati d<strong>al</strong>la geometria;• <strong>di</strong>mensioni e posizione <strong>del</strong>le <strong>di</strong>scontinuità <strong>del</strong>la s<strong>al</strong>datura.I primi due sono una conseguenza dei carichi applicati sulla struttura e soloparzi<strong>al</strong>mente <strong>del</strong> processo <strong>di</strong> re<strong>al</strong>izzazione <strong>del</strong>la s<strong>al</strong>datura (sforzi residui), mentregli <strong>al</strong>tri tre parametri <strong>di</strong>pendono d<strong>al</strong>le scelte progettu<strong>al</strong>i e d<strong>al</strong>le caratteristichee d<strong>al</strong>la qu<strong>al</strong>ità <strong>del</strong>la s<strong>al</strong>datura.La resistenza <strong>di</strong> una giunzione s<strong>al</strong>data può venire espressa in termini <strong>di</strong> fattori<strong>di</strong> riduzione, detti anche efficienze, che esprimono il rapporto tra la resistenza136
Figura 8.8: Componenti <strong>di</strong> sforzo considerate nella definizione <strong>del</strong>le efficienzea fatica <strong>di</strong> una giunzione s<strong>al</strong>data e quella <strong>del</strong> materi<strong>al</strong>e base. Solitamente fannoriferimento <strong>al</strong> limite <strong>di</strong> fatica; vedremo nel seguito che il concetto <strong>di</strong> limite <strong>di</strong>fatica trova una definizione convenzion<strong>al</strong>e nell’ambito <strong>del</strong>le normative <strong>di</strong> riferimentoper la verifica <strong>del</strong>le s<strong>al</strong>dature. Questi fattori <strong>di</strong> riduzione sono definiti conriferimento <strong>al</strong>le ampiezze <strong>del</strong>le componenti <strong>di</strong> sforzo agenti in <strong>di</strong>rezione perpen<strong>di</strong>colareσ ⊥ , par<strong>al</strong>lela σ ‖ e tangente τ ‖ <strong>al</strong> cordone <strong>di</strong> s<strong>al</strong>datura (v. Figura 8.8).Se in<strong>di</strong>chiamo con ∆σ ⊥,A , ∆σ ‖,A e ∆τ ‖,A i limiti <strong>di</strong> fatica associati a queste trecomponenti, con ∆σ D e ∆τ D i limiti <strong>di</strong> fatica <strong>del</strong> materi<strong>al</strong>e base (a trazione e ataglio, rispettivamente), le corrispondenti efficenze γ ⊥ , γ ‖ γ τ sono espresse nelseguente modo:γ ⊥ = ∆σ ⊥A∆σ D(8.1)γ ‖ = ∆σ ‖A∆σ D(8.2)γ τ = ∆τ ‖A∆τ D(8.3)V<strong>al</strong>ori caratteristici <strong>del</strong>le efficienze per un acciaio da costruzione simile <strong>al</strong>l’Fe360sono riportati nella tabella <strong>di</strong> Figura 8.<strong>10</strong>, in cui ∆σ D = 240 MPa(questo v<strong>al</strong>ore, corrispondente P f =<strong>10</strong>%, è relativo a un rapporto <strong>di</strong> ciclo R = 0,cioè a fatica pulsante, mentre la resistenza a fatica <strong>al</strong>ternata, cioè a R= -1, <strong>del</strong>l’Fe360è ∆σ D,R=−1 /2 = 180 MPa; questi v<strong>al</strong>ori sono coerenti con il <strong>di</strong>agramma<strong>di</strong> Haigh <strong>di</strong> Figura 8.9 ). Si noti che le efficienze sono in<strong>di</strong>cate con il simbolo γa in<strong>di</strong>care che fanno riferimento a proprietà <strong>del</strong> materi<strong>al</strong>e base ∆σ D ricavate daprovini estratti da lamiera grezza e non da provini lucidati (<strong>di</strong>verso effetto <strong>del</strong>lafinitura superfici<strong>al</strong>e). Una tabella an<strong>al</strong>oga, v<strong>al</strong>ida per le leghe <strong>di</strong> <strong>al</strong>luminio, èriportata in Figura 8.11137
Figura 8.9: Diagramma <strong>di</strong> Haigh semplificato per l’acciaio Fe360Figura 8.<strong>10</strong>: V<strong>al</strong>ori tipici <strong>del</strong>le efficienze <strong>di</strong> giunti s<strong>al</strong>dati in acciaio struttur<strong>al</strong>e [14]Figura 8.11: V<strong>al</strong>ori tipici <strong>del</strong>le efficienze <strong>di</strong> giunti s<strong>al</strong>dati in <strong>al</strong>luminio [14]138
Figura 8.12: Coefficienti <strong>di</strong> sicurezza per la resistenza a fatica γ MF proposti daEuroco<strong>di</strong>ce 3.8.2 Approccio agli sforzi nomin<strong>al</strong>i secondo le normativePoiché la s<strong>al</strong>datura è molto utilizzata come tecnica per re<strong>al</strong>izzare opere e struttureper uso civile, oltre che per la re<strong>al</strong>izzazione <strong>di</strong> apparecchi in pressione, in tuttii paesi sono state pubblicate norme e linee guida per la verifica <strong>di</strong> giunzioni s<strong>al</strong>date.In It<strong>al</strong>ia, fino a pochi anni fa era attiva la normativa CNR UNI <strong>10</strong>011 [15],che riguardava in gener<strong>al</strong>e le strutture in acciaio 2 e che presenta anche una parteriguardante la verifica <strong>di</strong> resistenza a fatica <strong>del</strong>le giunzioni s<strong>al</strong>date. Normativesimili sono pubblicate in <strong>al</strong>tri paesi. Ad esempio, le normative inglesi (BS) [16]pubblicano <strong>al</strong>cune normative che sono specifiche per il c<strong>al</strong>colo a fatica. Oggi ilriferimento normativo più aggiornato sulla verifica a fatica <strong>di</strong> strutture s<strong>al</strong>datesono le normative europee (Eurocode 3 per le strutture ini acciaio [17], Euroco<strong>di</strong>ce9 [18] per le strutture in <strong>al</strong>luminio). In aggiunta <strong>al</strong>le normative, esistonolinee guida per la progettazione e la verifica a fatica <strong>del</strong>l s<strong>al</strong>dature, come quellaprodotta d<strong>al</strong>l’IIW, Internation<strong>al</strong> Institute of Wel<strong>di</strong>ng [19]. Pur non avendo v<strong>al</strong>orenormativo, le linee guida presentano importanti suggerimenti e complementi<strong>al</strong>le prescrizioni <strong>del</strong>l normative.Nel caso <strong>del</strong>la progettazione a fatica, le norme possono essere intese comerequisito minimo per la garanzia dei prodotti, e un’ulteriore an<strong>al</strong>isi si deve renderenecessaria per quei componenti che si ritengono critici per la sicurezza (sipensi <strong>al</strong>le costruzioni impiegate per il trasporto ferroviario). Si tenga conto cheimportanti campi <strong>del</strong>la tecnica non utilizzano co<strong>di</strong>ci e normative per la progettazione,come ad esempio il settore automobilistico e il settore aerospazi<strong>al</strong>e, purfacendo largo uso <strong>del</strong>la tecnica <strong>del</strong>la s<strong>al</strong>datura.In gener<strong>al</strong>e, le normative si basano sul c<strong>al</strong>colo degli sforzi nomin<strong>al</strong>i. Le normeimpongono <strong>di</strong> verificare che le ampiezze <strong>di</strong> variazione degli sforzi nomin<strong>al</strong>i, ∆σsiano sempre inferiori ad un’ampiezza nomin<strong>al</strong>e ammissibile, ottenuta <strong>di</strong>videndol’ampiezza limite per un opportuno coefficiente <strong>di</strong> sicurezza corrispondente, aseconda dei casi, a durata illimitata, o a durata finita oppure ancora <strong>al</strong> caso <strong>di</strong>con<strong>di</strong>zioni <strong>di</strong> carico variabili. In Figura 8.12 è riportata la tabella dei coefficienti<strong>di</strong> sicurezza γ MF proposti da Euroco<strong>di</strong>ce 3.2 Per gli apparecchi in pressione sono previste normative specifiche: in questi casi i controllie le verifiche sono ancora più dettagliate. Infatti in questo settore <strong>del</strong>le costruzioni meccaniche,la tecnica <strong>di</strong> s<strong>al</strong>datura riveste, a ragione, importanza fondament<strong>al</strong>e.139
Figura 8.13: Curve SN utilizzate d<strong>al</strong>la normativa Euroco<strong>di</strong>ce 3. .Gli sforzi ammissibili in funzione <strong>del</strong> numero <strong>di</strong> cicli atteso, sono dati sottoforma <strong>di</strong> curve SN in funzione <strong>del</strong>la classe <strong>del</strong>la giunzione. In Figura 8.13 sonoriportate le curve SN relative agli acciai da costruzione (sono v<strong>al</strong>ide per tuttigli acciai da costruzione con f y ≤ 690N/mm 2 ), tratte da Euroco<strong>di</strong>ce 3. Questecurve S-N sono ottenute per traslazione lungo l’asse dei ∆σ <strong>di</strong> una curva <strong>di</strong>riferimento, riportata in Figura 8.14. Sono caratterizzate d<strong>al</strong>lo stesso v<strong>al</strong>ore<strong>del</strong>l’inverso <strong>del</strong>la pendenza m 1 = 3 <strong>del</strong> tratto a termine, mentre si <strong>di</strong>stinguonoper il v<strong>al</strong>ore <strong>del</strong>la resistenza ∆σ C a N = 2 · <strong>10</strong> 6 cicli. Questo tratto rettilineo siestende fino a durate pari a N C = 5 · <strong>10</strong> 6 cicli. Oltre a questa durata, nel caso<strong>di</strong> fatica ad ampiezza costante, si considera che esista un v<strong>al</strong>ore ∆σ D <strong>al</strong> <strong>di</strong> sotto<strong>del</strong> qu<strong>al</strong>e non sia necessaria <strong>al</strong>cuna verifica (linea c trattegiata in figura 8.14).L’ulteriore tratto continuo che in Figura 8.14 termina con il tratto orizzont<strong>al</strong>ed verra spiegato nel seguito con riferimento <strong>al</strong>la verifica a fatica in presenza <strong>di</strong>sforzi ad ampiezza variabile.Curve S-N an<strong>al</strong>oghe sono <strong>di</strong>sponibili per i giunti s<strong>al</strong>dati in lega <strong>di</strong> <strong>al</strong>uminio,come riportato in Figura 8.15. La norma <strong>di</strong> riferimento in questo caso è Euroco<strong>di</strong>ce9 [18] (in questa norma, per <strong>al</strong>cuni tipi <strong>di</strong> giunzioni in <strong>al</strong>luminio, sonopreviste pendenze <strong>del</strong> tratto a termine <strong>di</strong>verse da quelle degli acciai e <strong>di</strong>verse <strong>al</strong>variare <strong>del</strong>la classe <strong>del</strong> giunto).Concorrono <strong>al</strong>la definizione <strong>del</strong>la classe tre elementi princip<strong>al</strong>i: la geometria(in ultima an<strong>al</strong>isi il tipo <strong>di</strong> <strong>di</strong>scontinuità o intaglio), il tipo <strong>di</strong> sollecitazione(il tipo <strong>di</strong> forze che deve trasmettere il giunto e la posizione <strong>del</strong> loro punto140
Figura 8.14: Curva SN <strong>di</strong> riferimento utilizzata d<strong>al</strong>la normativa Euroco<strong>di</strong>ce 3.Figura 8.15: Curve SN relative <strong>al</strong>le costruzioni in <strong>al</strong>luminio [19].141
Figura 8.16: Esempio <strong>di</strong> tabella relativa <strong>al</strong>le classi <strong>di</strong> resistenza <strong>del</strong>le s<strong>al</strong>dature,tratta da Euroco<strong>di</strong>ce 3.142
<strong>di</strong> applicazione) ed infine la qu<strong>al</strong>ità <strong>del</strong>la fabbricazione e/o il tipo e il livello<strong>di</strong> controlli eseguiti. Come mostrato in Figura 8.16, le normative propongonotabelle dove nella prima colonna è riportato il v<strong>al</strong>ore <strong>di</strong> ∆σ, nella seconda unoschea <strong>del</strong>la giunzione e <strong>del</strong>le forze che trasmette, nella terza una descrizionee infine nella quarta eventu<strong>al</strong>i precisazioni o considerazioni sulle mod<strong>al</strong>ità <strong>di</strong>re<strong>al</strong>izzazione o sul livello <strong>di</strong> controllo.D<strong>al</strong>le espressioni <strong>del</strong>le curve SN, <strong>del</strong> tipo ∆σ m · N = ∆σC m · N C, si ricav<strong>al</strong>’espressione <strong>del</strong>la durata corrispondente a un dato ∆σ nomin<strong>al</strong>e applicato: peril tratto a termine (cioè per ∆σ > ∆σ C , v<strong>al</strong>e a <strong>di</strong>re per N < 5 · <strong>10</strong> 6 ), si ha( ) m1N = 2 · <strong>10</strong> 6 ∆σC(8.4)∆σ/γ MFIl v<strong>al</strong>ore <strong>del</strong>lo sforzo nomin<strong>al</strong>e applicato, da cui si ricava ∆σ, è c<strong>al</strong>colato seguendola definizione corrispondente <strong>al</strong>la classe <strong>del</strong> giunto, cioè con riferimento aduna determinata configurazione <strong>di</strong> carichi e ad una sezione resistente in<strong>di</strong>catad<strong>al</strong>la norma. Si osservi che ai fini <strong>del</strong>la verifica è richiesto <strong>di</strong> consideare solol’ampiezza ∆σ <strong>del</strong>la variazione degli sforzi, trascurando il v<strong>al</strong>ore me<strong>di</strong>o. Ciò ègiustificato d<strong>al</strong>la presenza, nelle giunzioni s<strong>al</strong>date che non siano state soggette atrattamento termici <strong>di</strong> <strong>di</strong>stensione, degli sforzi residui <strong>di</strong> trazione (come abbiamogià visto possono raggiungere il carico <strong>di</strong> snervamento <strong>del</strong> materi<strong>al</strong>e base).La presenza <strong>di</strong> questi sforzi residue rende <strong>di</strong> fatto trascurabile la presenza <strong>di</strong>una componente me<strong>di</strong>a aggiuntiva, sia essa <strong>di</strong> trazione o <strong>di</strong> compressione, legataagli sforzi applicati. Nel caso <strong>di</strong> giunzioni <strong>di</strong>stese è invece previsto che si tengain conto l’effetto degli sforzi me<strong>di</strong>.Figura 8.17: Disegno e <strong>di</strong>mensioni <strong>del</strong>la struttura da verificare143
Esempio 8.1 Sia data una struttura come quella <strong>di</strong>segnata in Figura 8.17. Si tratta<strong>di</strong> una porzione <strong>di</strong> una trave a struttura scatolare, con due rinforzi s<strong>al</strong>dati sulle piattabandesuperiore ed inferiore, terminati con una sagoma semicircolare. Il modulo <strong>di</strong>resistenza <strong>del</strong>la sezione nomin<strong>al</strong>e è quello <strong>del</strong>la sezione rettangolare cava <strong>di</strong> <strong>di</strong>mensioni330 x 400 x <strong>10</strong>, e v<strong>al</strong>eW = 1 12(330 · 400 3 − 3<strong>10</strong> · 380 3) · 4002 = 1, 71 · <strong>10</strong>6 mm 4 (8.5)Supponendo che in corrispondenza <strong>del</strong>la sezione A-A, posta <strong>al</strong> termine <strong>del</strong> rinforzosemicircolare, agisca l’azione interna momento flettente pulsante ∆M = 128,5 kNm,si c<strong>al</strong>cola uno sofrzo nomin<strong>al</strong>e σ = M/W = 75MP a. Ipotizzando l’impiego <strong>di</strong> unacciaio struttur<strong>al</strong>e, la classe <strong>di</strong> dettaglio riportata in Euroco<strong>di</strong>ce 3 più simile a questaconfigurazione è la qunta d<strong>al</strong>l’<strong>al</strong>to tra quelle riportate in Figura 8.16. Il v<strong>al</strong>ore <strong>di</strong> ∆σ Cassociato è 50 MPa e pertanto si c<strong>al</strong>cola una durata( ) 3N = 2 · <strong>10</strong> 6 50= 592.000 (8.6)758.2.1 Effetto <strong>del</strong>lo sforzo me<strong>di</strong>oNel caso in cui la giunzione abbia subito un trattamento termico <strong>di</strong> <strong>di</strong>stensione<strong>del</strong>le tensioni residue, è opportuno tenere conto <strong>del</strong>l’effetto <strong>del</strong>la componenteme<strong>di</strong>a <strong>del</strong> ciclo degli sforzi sulla resistenza a fatica. Come è noto, una componente<strong>di</strong> compressione ha l’effetto <strong>di</strong> aumentare la resistenza a fatica. Poichéle curve <strong>di</strong> riferimento fanno rifermento a prove <strong>di</strong> fatica pulsante (rapporto <strong>di</strong>ciclo R = 0), qu<strong>al</strong>ora una parte <strong>del</strong> ciclo degli sforzi sia <strong>di</strong> compressione, anzichémo<strong>di</strong>ficare le curve, Euroco<strong>di</strong>ce 3 prevede <strong>di</strong> mo<strong>di</strong>ficare il v<strong>al</strong>ore <strong>del</strong>lo sforzo nomin<strong>al</strong>e∆σ, secondo lo schema riportato in Figura, cioè aggiungendo <strong>al</strong>la partepositiva <strong>del</strong> ciclo il 60% <strong>del</strong>la frazione <strong>di</strong> compressione.Un approccio molto più chiaro è quello proposto d<strong>al</strong>le linee guida <strong>del</strong>l’IIWprevedono <strong>di</strong> mo<strong>di</strong>ficare il v<strong>al</strong>ore <strong>di</strong> ∆σ C , moltiplicandolo per un fattore correttivof R che tenga conto <strong>del</strong> rapporto <strong>di</strong> ciclo R, i cui v<strong>al</strong>ori sono riportatiin Figura 8.19. Ad esempio considerando una s<strong>al</strong>datura completamente <strong>di</strong>stesasoggetta ad uno sforzo <strong>al</strong>ternato simmetrico (R = −1), lo sforzo ammissibile∆σ C <strong>del</strong>la s<strong>al</strong>datura può aumentare <strong>di</strong> un fattore 1.6 rispetto ai v<strong>al</strong>ori usu<strong>al</strong>iriportati nelle tabelle <strong>di</strong> resistenza <strong>del</strong>le varie classi <strong>di</strong> s<strong>al</strong>datura.8.2.2 Multiassi<strong>al</strong>ità degli sforziNel caso <strong>di</strong> giunzioni s<strong>al</strong>date <strong>di</strong> elementi in acciaio, qu<strong>al</strong>ora lo stato <strong>di</strong> sforzonomin<strong>al</strong>e consista in una componente <strong>di</strong> taglio agente in <strong>di</strong>rezione par<strong>al</strong>lela <strong>al</strong>cordone <strong>di</strong> s<strong>al</strong>datura, è prevista l’adozione <strong>di</strong> due curve S-N espresse in termini<strong>di</strong> ∆τ, caratterizzate da una pendenza <strong>del</strong> tratto a termine minore (m 1 = 5)<strong>di</strong> quella associata a sforzi ∆σ agenti in <strong>di</strong>rezione perpen<strong>di</strong>colare <strong>al</strong> cordone <strong>di</strong>144
Figura 8.18: Mo<strong>di</strong>fica <strong>del</strong> ciclo degli sforzi per giunzioni <strong>di</strong>stese, secondo normativaEuroco<strong>di</strong>ce 3.s<strong>al</strong>datura (m 1 = 3). In Figura 8.20 sono riportate le curve corrispondenti <strong>al</strong>leclassi contemplate da Euroco<strong>di</strong>ce 3.Nel caso <strong>di</strong> presenza contemporanea <strong>di</strong> sforzi norm<strong>al</strong>i ∆σ e tangenzi<strong>al</strong>i ∆τ,qu<strong>al</strong>ora per la classe <strong>di</strong> dettaglio in questione non sia espressamente previstad<strong>al</strong>la normativa una formula che permetta <strong>di</strong> c<strong>al</strong>colare un’ampiezza <strong>di</strong> variazionedegli sforzi <strong>di</strong> riferimento, si procede <strong>al</strong>la combinazione <strong>del</strong>le due componentisecondo la seguente formula <strong>di</strong> verifica( ) 3 ( ) 5 ∆σ ∆τ+ ≤ 1.0 (8.7)∆σ C ∆τ CIl significato fisico <strong>del</strong>la (8.7) è che t<strong>al</strong>e equazione corrisponde a combinare i ∆σed i ∆τ in modo che il danno (ve<strong>di</strong> sezione seguente) sia 1, in corrispondenza<strong>di</strong> 2 · <strong>10</strong> 6 cicli. Nel caso <strong>di</strong> verifica per un numero <strong>di</strong> cicli inferiore, effettuandoquin<strong>di</strong> un c<strong>al</strong>colo simile, si può applicare più intuitivamente la relazione:( ) ( )n n+ ≤ 1.0 (8.8)N N8.2.3 Sforzi ad ampiezza variabileσNel caso <strong>di</strong> verifiche a fatica in presenza <strong>di</strong> sforzi ad ampiezza variabile, le curveS-N <strong>di</strong> riferimento vengono mo<strong>di</strong>ficate in moto t<strong>al</strong>e da ammettere un contributo<strong>al</strong> danno per fatica anche <strong>di</strong> cicli <strong>di</strong> ampiezza inferiore a ∆σ D . Esiste ancoraun limite <strong>di</strong> fatica, ma questo limite è spostato più in basso, <strong>al</strong> v<strong>al</strong>ore ∆σ L ,corrispondente a durate superiori a N = <strong>10</strong> 8 cicli. Il tratto compreso tra ∆σ D eτ145
Figura 8.19: Fattore <strong>di</strong> correzione <strong>del</strong>la resistenza a fatica, secondo le line guida<strong>del</strong>l’IIW.Figura 8.20: Curva SN utilizzate d<strong>al</strong>la normativa Euroco<strong>di</strong>ce 3 per la verifica inpresenza <strong>di</strong> sforzi <strong>di</strong> taglio.146
∆σ L si assume che abbia una pendenza pari a 1/m 2 , dove m 2 = 2 · m 1 − 1 = 5per gli acciai.Nel caso <strong>di</strong> sforzi ad ampiezza variabile Euroco<strong>di</strong>ce 3 prevede una procedurariassunta in figura8.21. Per prima cosa è necessario costruire la sequenzatempor<strong>al</strong>e degli sforzi nomin<strong>al</strong>i in corrispondenza <strong>del</strong> dettaglio da verificare.Successivamente, con un opportuno metodo (per esempio il metodo Rainflow)si procede <strong>al</strong>l’in<strong>di</strong>viduazione dei cicli e <strong>al</strong> loro conteggio, <strong>al</strong> fine <strong>di</strong> costrure unospettro <strong>di</strong> carico, caratterizzato da blocchi <strong>di</strong> ampiezza ∆σ i che si estendonoper un numero <strong>di</strong> cicli n i . Per ciascuno <strong>di</strong> questi blochhi, con rifernimento <strong>al</strong>lacurva S-N <strong>del</strong> dettaglio in questione, si c<strong>al</strong>cola il numero <strong>di</strong> cicli a rottura N i .La verifica fin<strong>al</strong>e è condotta applicando una legge <strong>di</strong> somma lineare <strong>del</strong> danno(legge <strong>di</strong> Miner)∑ niN i≤ D = 1.0 (8.9)dove N i viene c<strong>al</strong>colato applicando le seguenti equazioni:( ) m1∆σ i > ∆σ C → N i = 2 · <strong>10</strong> 6 ∆σC(8.<strong>10</strong>)∆σ i /γ MF( ) m2( ) m1∆σ < ∆σ C → N = 2 · <strong>10</strong> 6 ∆σC 2(8.11)∆σ i /γ MF 5Il v<strong>al</strong>ore <strong>del</strong>la somma <strong>del</strong> danno D ugu<strong>al</strong>e a 1.0 è ritenuta d<strong>al</strong>l’IIW nonconservativo. Pertanto viene proposto un v<strong>al</strong>ore ridotto a 0.5.147
Figura 8.21: Schema proposto da Euroco<strong>di</strong>ce 3 per la verifica in presenza <strong>di</strong> sforziad ampiezza variabile.148
8.3 Metodo hot-spotQu<strong>al</strong>ora il manufatto che è oggetto <strong>del</strong>la verifica non sia riconducibile a nessuna<strong>del</strong>le classi previste d<strong>al</strong>le normative, è possibile applicare un metodo, detto hotspot [20], basato sull’intensità <strong>del</strong>le azioni interne, v<strong>al</strong>utate in corrispondenza<strong>del</strong> cordone <strong>di</strong> s<strong>al</strong>datura me<strong>di</strong>ante opportune tecniche <strong>di</strong> estrapolazione (ovviamentenulla vieta <strong>di</strong> applicare il metodo hot spot anche a giunzioni contemplatetra ii dettagli struttur<strong>al</strong>i contemplati d<strong>al</strong>le normative). L’estrapolazione è necessariain quanto la <strong>di</strong>stribuzione degli sforzi nello spessore <strong>di</strong> una lamiera incorrispondenza <strong>di</strong> una s<strong>al</strong>datura non è <strong>di</strong>rettamente riconducibile ai v<strong>al</strong>ori <strong>del</strong>leazioni interne che la hanno generata. Ciò è dovuto <strong>al</strong>la presenza <strong>del</strong> cordone <strong>di</strong>s<strong>al</strong>datura che genera una concentrazione <strong>di</strong> sforzo e una <strong>di</strong>stribuzione non linearedegli sforzi lungo lo spessore, come mostrato in Figura 8.22. Le sole azioniFigura 8.22: Distribuzione degli sforzi nello spesssore in corrispondenza <strong>di</strong> unagiunzione s<strong>al</strong>data.Figura 8.23: Distribuzione lineare degli sforzi nello spesssore, in corrispondenza <strong>di</strong>una giunzione s<strong>al</strong>data, atttribuibile <strong>al</strong>le sole azioni interne.interne (momento flettente, che genera σ b , ed azione assi<strong>al</strong>e membran<strong>al</strong>e, chegenera σ m ) infatti genererebbero una <strong>di</strong>stribuzione lineare, qu<strong>al</strong>e quella mostatain Figura 8.23. Questa <strong>di</strong>stribuzione <strong>di</strong> sforzi prende il nome <strong>di</strong> sforzi struttur<strong>al</strong>i,in quanto appunto legati <strong>al</strong>le sole azioni interne. A questa si aggiunge una componentenon lineare σ nlp , il cui andamento <strong>di</strong>pende d<strong>al</strong>la geometria loc<strong>al</strong>e <strong>del</strong>149
cordone <strong>di</strong> s<strong>al</strong>datura. Poiché, come abbiamo visto, t<strong>al</strong>e geometria presenta unavariabilità elevata, con il metodo hot spot si mira a ottenere uno sforzo loc<strong>al</strong>e<strong>di</strong> riferimento in corrispondenza <strong>del</strong> punto più sollecitato, l’hot spot appunto,che non <strong>di</strong>penda da queste con<strong>di</strong>zioni loc<strong>al</strong>i non note.Figura 8.24: Distanza minima d<strong>al</strong> giunto da cui si procede per l’estrapolazionedegli sforzi struttur<strong>al</strong>i.Per ricavare il v<strong>al</strong>ore <strong>del</strong>lo sforzo struttur<strong>al</strong>e nell’hot spot viene prescrittaun’estrapolazione a partire dai v<strong>al</strong>ori segli sforzi struttur<strong>al</strong>i c<strong>al</strong>colati in prossimità<strong>del</strong> giunto, a partire da una <strong>di</strong>stanza minima fissata in 0, 4t, dove t è lospessore <strong>del</strong>la lamiera <strong>di</strong> base. Il v<strong>al</strong>ore <strong>di</strong> 0, 4t è quello che nella maggior partedei casi garantisce che la <strong>di</strong>stribuzione degli sforzi nello spessore non risenta più<strong>del</strong>la componente non lineare σ nlp , come mostrato in Figura 8.24. Poiché nellamagior parte dei casi si procede ad un’estrapolazione lineare, il secondo puntosi posiziona ad una <strong>di</strong>stanza pari <strong>al</strong>lo spessore t <strong>del</strong>la lamiera <strong>di</strong> base.Me<strong>di</strong>ante questa tecnica <strong>di</strong> estrapolazione, lo sforzo struttur<strong>al</strong>e nell’hot spotrisulta più basso <strong>del</strong>lo sforzo <strong>di</strong> picco re<strong>al</strong>e, ma maggiore <strong>del</strong>lo sforzo nomin<strong>al</strong>e,come mostrato schematicamente in Figura 8.25. Rispetto <strong>al</strong>lo sforzo nomin<strong>al</strong>eσ n , lo sforzo <strong>di</strong> hot spot σ HS risulta pertanto amplificato <strong>di</strong> un coefficiente K s ,per cuiσ HS = K s · σ n (8.12)Il metodo hot spot si presta particolarmente <strong>al</strong>l’applicazione ad an<strong>al</strong>isi agli elementifiniti <strong>di</strong> strutture. E’ sufficiente <strong>di</strong>sporre <strong>del</strong>la coppia <strong>di</strong> no<strong>di</strong> (<strong>di</strong> estremità,ma anche interme<strong>di</strong>, o mid-node) posti <strong>al</strong>le <strong>di</strong>stanze prescritte, come mostratoin Figura 8.26. Poiché nella pratica è frequente l’impiego <strong>di</strong> elementi aventi me<strong>di</strong>amentetutti le stesse <strong>di</strong>mensioni, è ammesso il ri<strong>corso</strong> <strong>al</strong>l’estrapolazione anchea partire da no<strong>di</strong> interme<strong>di</strong> posti <strong>al</strong>le <strong>di</strong>stanze <strong>di</strong> 0, 5t e 1, 5t, come mostrato inFigura 8.27Le formule che forniscono il v<strong>al</strong>ore <strong>del</strong>lo sforzo nell’hot spot sono, per l’estrapolazioneeseguita a partire da punti posti <strong>al</strong>le <strong>di</strong>stanze <strong>di</strong> 0, 4t e 1, 0t,σ hs = 1, 67 · σ 1,0t − 0, 67 · σ 0,4t (8.13)150
Figura 8.25: Definizione <strong>del</strong> coefficiente K s .Figura 8.26: Estrapolazione degli sforzi struttur<strong>al</strong>i da un mo<strong>del</strong>lo FEMFigura 8.27: Estrapolazione degli sforzi struttur<strong>al</strong>i da un mo<strong>del</strong>lo FEM con no<strong>di</strong>equi<strong>di</strong>stanti151
mentre per l’estrapolazione a partire da punti posti <strong>al</strong>le <strong>di</strong>stanze 0, 5t e 1, 5tσ hs = 1, 5 · σ 1,5t − 0, 5 · σ 0,5t (8.14)Il tipo <strong>di</strong> elemento ottim<strong>al</strong>e da impiegare per questo tipo <strong>di</strong> an<strong>al</strong>isi deveessere quello che permetta <strong>di</strong> c<strong>al</strong>colare σ HS con il minor numero <strong>di</strong> elementi. Int<strong>al</strong> senso si consiglia <strong>di</strong> utilizzare (v. Figura 8.28):• elementi soli<strong>di</strong> quadratici, con un solo elemento nello spessore, a integrazioneridotta, con rappresentazione <strong>del</strong> cordone <strong>di</strong> s<strong>al</strong>datura me<strong>di</strong>anteelementi <strong>di</strong> tipo prismatico• elementi shell quadratici con rappresentazione <strong>del</strong> cordone <strong>di</strong> s<strong>al</strong>daturame<strong>di</strong>ante:– elementi rigi<strong>di</strong> vertic<strong>al</strong>i;– elementi shell vertic<strong>al</strong>i;– elementi shell inclinati, a riprodurre la geometria nomin<strong>al</strong>e <strong>del</strong> cordone<strong>di</strong> s<strong>al</strong>datura.Figura 8.28: Tipi <strong>di</strong> elementi adatti per an<strong>al</strong>isi hot spot [20]I v<strong>al</strong>ori <strong>di</strong> ampiezza degli sforzi <strong>di</strong> hot spot ammissibili sono stati determinatime<strong>di</strong>ante estese campagne speriment<strong>al</strong>i, come quella i cui risultati sonoriportati in Figura 8.29, che hanno portato <strong>al</strong>la conclusione che sia possibile152
fare riferimento, nel caso degli acciai, <strong>al</strong>le sole due classi denominate FAT90e FAT<strong>10</strong>0 (cioè <strong>al</strong>le classi <strong>di</strong> dettagglio corrispondenti a ∆σ C = 90MP a e a∆σ C = <strong>10</strong>0MP a. In Euroco<strong>di</strong>ce 3 è riportata una tabella (v. Figura 8.30) conle classi <strong>di</strong> resistenza da assumere nel caso in cui si proceda <strong>al</strong>la verifica me<strong>di</strong>anteil metodo hot spot dei tipi <strong>di</strong> giunzione riportati nella tabella stessa. Ilmeodo hot spot è contemplato anche d<strong>al</strong>la norma Euroco<strong>di</strong>ce 9 per le strutturein <strong>al</strong>luminio.Figura 8.29: Risultati speriment<strong>al</strong>i che hanno permesso <strong>di</strong> definire la resistenzahot spot degli acciai.Rispetto <strong>al</strong>l’approccio nomin<strong>al</strong>e, la verifica secondo questo metodo si basaquin<strong>di</strong> sulla <strong>di</strong>stribuzione <strong>del</strong>le azioni interne v<strong>al</strong>utate me<strong>di</strong>ante estrapolazione incorrispondenza <strong>del</strong>la giunzione (l’approccio agli sforzi nomin<strong>al</strong>i invece si basa suconfigurazioni prestabilite, dove le azioni interne sono c<strong>al</strong>colate ad una <strong>di</strong>stanzaopportuna d<strong>al</strong>la giunzione). In questo modo è <strong>al</strong>lora possibile includere l’effetto<strong>di</strong> eventu<strong>al</strong>i <strong>di</strong>s<strong>al</strong>lineamenti <strong>del</strong>le lamiere, <strong>di</strong> eccentricità (per esempio nei giuntia sovrapposizione) e più in gener<strong>al</strong>e <strong>del</strong>lo stato <strong>di</strong> sollecitazione effettivo neglielementi da verificare.Esempio 8.2 Si consideri la stessa struttura an<strong>al</strong>izzata nell’esempio precedente e lasi an<strong>al</strong>izzi con il metodo hot spot. Per fare ciò è necessario costruire un mo<strong>del</strong>lo aglielementi finiti <strong>del</strong>la struttura. Il mo<strong>del</strong>lo, riportato in Figura 8.31, è composto daelementi <strong>di</strong> tipo shell a 8 no<strong>di</strong> e la mesh è stata costruita in modo t<strong>al</strong>e che lungo l<strong>al</strong>inea <strong>di</strong> mezzeria <strong>del</strong>la piattabanda superiore, in prossimità <strong>del</strong> termine <strong>del</strong> rinforzosemicircolare, si <strong>di</strong>sponessero due no<strong>di</strong> <strong>al</strong>le <strong>di</strong>stanze prestabilite <strong>di</strong> 0, 5t e 1, 5t (v.Figura 8.32).La presenza <strong>del</strong> cordone <strong>di</strong> s<strong>al</strong>datura è simulata per mezzo <strong>di</strong> elementi shell <strong>di</strong>spostisia vertic<strong>al</strong>mente, sia secondo lo stesso angolo d’inclinazione <strong>del</strong> profilo nomin<strong>al</strong>e <strong>del</strong>cordone stesso, come mostrato in Figura 8.33. In questo modo, oltre a riprodurrel’irrigi<strong>di</strong>mento dovuto <strong>al</strong>la presenza <strong>del</strong> cordone <strong>di</strong> s<strong>al</strong>datura, la posizione <strong>del</strong>l’hotspot nel mo<strong>del</strong>lo agli elementi finiti viene a coincidere con quella <strong>del</strong>l’hot spot nella153
Figura 8.30: Tabella dei v<strong>al</strong>ori <strong>di</strong> resistenza hot spot riportata in Euroco<strong>di</strong>ce 3.Figura 8.31: Mo<strong>del</strong>lo agli elementi finiti <strong>del</strong>la struttura.154
Figura 8.32: Particolare <strong>del</strong> mo<strong>del</strong>lo in corrispondenza <strong>del</strong> cordone <strong>di</strong> s<strong>al</strong>daturaFigura 8.33: Simulazione <strong>del</strong>la presenza <strong>del</strong> cordone <strong>di</strong> s<strong>al</strong>datura me<strong>di</strong>ante elementiinclinati o me<strong>di</strong>ante elementi rigi<strong>di</strong> vertic<strong>al</strong>istruttura re<strong>al</strong>e. Diversamente, se non fossero stati presenti gli elementi inclinati, masolo elementi vertic<strong>al</strong>i, eventu<strong>al</strong>mente <strong>di</strong> tipo rigido, l’hot spot nel mo<strong>del</strong>lo si sarebbevenuto a trovare spostato a sinistra rispetto <strong>al</strong>la posizione assunta nella struttura re<strong>al</strong>e.L’an<strong>al</strong>isi fornisce la <strong>di</strong>stribuzione degli sforzi σ x agenti in <strong>di</strong>rezione par<strong>al</strong>lella <strong>al</strong>l’asse<strong>del</strong>la trave riportata in Figura 8.34. Il v<strong>al</strong>ore massimo <strong>di</strong> σ x si registra in prossimità<strong>del</strong>la mezzeria <strong>del</strong>la piattabanda, laddove agisce perpen<strong>di</strong>colarmente <strong>al</strong> cordone <strong>di</strong> s<strong>al</strong>datura.Tuttavia nel nodo posizionato esattamente <strong>al</strong>l’intersezione tra il cordone <strong>di</strong>s<strong>al</strong>datura e la piatttabanda si registra una sollecitazione apparentemente inferiore, comesi può vedere in Figura 8.35, a causa <strong>del</strong>l’operazione <strong>di</strong> resitituzione <strong>al</strong> nodo <strong>di</strong>un v<strong>al</strong>ore me<strong>di</strong>o dei v<strong>al</strong>ori nod<strong>al</strong>i <strong>di</strong> sforzo associato agli elementi aventi quel nodo incomune. Non è quin<strong>di</strong> possibile utilizzare il v<strong>al</strong>ore <strong>di</strong> sforzo agente nell’hot spot leggendolo<strong>di</strong>rettamente in corrispondenza <strong>del</strong> nodo posto nell’hot spot, bensì è necessarioprocedere <strong>al</strong>l’estrapolazione secondo la procedura vista. In Figura 8.36 è riportatol’andamento dei v<strong>al</strong>ori <strong>di</strong> σ x in funzione <strong>del</strong>la <strong>di</strong>stanza d<strong>al</strong>l’hotspot. Il risultato <strong>del</strong>-155
Figura 8.34: Distribuzione degli sforzi σ x nella piattabanda superiorel’estrapolazione lineare a partire dai v<strong>al</strong>ori <strong>di</strong> sigma x letti in corrispondenza dei no<strong>di</strong>posti <strong>al</strong>le <strong>di</strong>stanze 0, 5t e 1, 5t, rispettivamente pari a 144,4 MPa e 158,8 MPa, portaa v<strong>al</strong>utare una sollecitazione ∆σ hs = 1, 5 · 158, 8 − 0, 5 · 144, 4 = 166MP a. Assumendouna classe ∆σ C = <strong>10</strong>0MP a, sulla base <strong>del</strong>lo schema riportato in Figura 8.30, si c<strong>al</strong>colauna durata pari a( ) 3N = 2 · <strong>10</strong> 6 <strong>10</strong>0= 547.000 (8.15)166v<strong>al</strong>ore molto prossimo a quello ottenuto applicando il metodo basato sugli sforzinomin<strong>al</strong>i.156
Figura 8.35: Particolare <strong>del</strong>la <strong>di</strong>stribuzione degli sforzi σ x nella piattabandasuperiore; si osservi la riduzione apparente in corrispondenza <strong>del</strong>l’hot spotFigura 8.36: Grafico dei v<strong>al</strong>ori <strong>di</strong> σ x in funzione <strong>del</strong>la <strong>di</strong>stanza d<strong>al</strong>l’hot spot157
8.4 Difetti <strong>di</strong> s<strong>al</strong>datura e c<strong>al</strong>colo <strong>del</strong>la vita a faticaI <strong>di</strong>fetti <strong>di</strong> s<strong>al</strong>datura sono princip<strong>al</strong>mente imperfezioni geometriche generatedurante il processo <strong>di</strong> fabbricazione, come cricche, strappi lamellari, inclusionisolide, penetrazioni incomplete, mancate fusioni e <strong>al</strong>tre (figure 8.37, 8.38, 8.39).La presenza <strong>di</strong> questi <strong>di</strong>fetti suggerisce l’applicazione <strong>di</strong> an<strong>al</strong>isi basate suiprincipi <strong>del</strong>la meccanica <strong>del</strong>la frattura. Secondo questo approccio la durataa fatica degli elementi s<strong>al</strong>dati consistere esclusivamente nella propagazione <strong>di</strong>cricche descritta attraverso la variazione <strong>del</strong> fattore d’intensità degli sforzi ∆K Ied una opportuna legge <strong>di</strong> propagazione in cui da/dN = f(∆K).Pur se tutte le s<strong>al</strong>dature sono caratterizzate da imperfezioni e <strong>di</strong>fetti (??)<strong>di</strong>venta <strong>di</strong>fficile mo<strong>del</strong>lare precisamente il SIF <strong>di</strong> piccole fratture <strong>al</strong> piede o <strong>al</strong>lara<strong>di</strong>ce <strong>del</strong>la s<strong>al</strong>datura, oltre che tenere adeguatamente in conto il cosiddettoeffetto ’short-cracks’ (legato <strong>al</strong>le approssimazioni <strong>del</strong> campo singolare quandole cricche sono piccole).Per questo motivo si applica la Meccanica <strong>del</strong>la Frattura per la v<strong>al</strong>utazione<strong>del</strong>la resistenza statica o <strong>del</strong>la vita residua <strong>di</strong> s<strong>al</strong>dature contenenti <strong>di</strong>fetti soloquando questi abbiano <strong>di</strong>mensioni rilevabili con i controlli non <strong>di</strong>struttivi o permo<strong>del</strong>lare l’effetto <strong>del</strong>la preparazione in giunti a non completa penetrazione.Il c<strong>al</strong>colo <strong>del</strong>la durata <strong>di</strong> un elemento contenente una cricca <strong>di</strong> profon<strong>di</strong>tànota si può c<strong>al</strong>colare integrando la curva <strong>di</strong> Paris (figura ??):dovenel modo seguenteN =∫ afa idadN = C∆Km∆K = F ∆S √ πadaC(∆S) m√ π(F (a)a) m (8.16)Come è noto, la durata c<strong>al</strong>colata attraverso questo metodo è fortemente influenzatad<strong>al</strong> v<strong>al</strong>ore <strong>del</strong>la <strong>di</strong>mensione inizi<strong>al</strong>e <strong>del</strong>la cricca impiegata (i questo caso i<strong>di</strong>fetti rilevati o la mancanza <strong>di</strong> penetrazione). Il v<strong>al</strong>ore fin<strong>al</strong>e <strong>del</strong>la lunghezza<strong>del</strong>la cricca a f può essere determinato, nel caso <strong>di</strong> lamiere e giunti s<strong>al</strong>dati, comelo spessore <strong>del</strong>le membrature attraversate d<strong>al</strong>la frattura (o nel caso <strong>di</strong> giunti agrosso spessore come il v<strong>al</strong>ore in corrispondenza <strong>del</strong> qu<strong>al</strong>e si supera il v<strong>al</strong>ore <strong>di</strong>tenacità <strong>al</strong>la frattura K Ic sotto l’azione dei carichi massimi <strong>di</strong> esercizio).Per il fattore <strong>di</strong> forma F l’assunzione che spesso si fa nelle s<strong>al</strong>dature, ancheper effetto <strong>del</strong>le concentrazioni <strong>di</strong> sforzo <strong>al</strong> piede ed <strong>al</strong>la ra<strong>di</strong>ce <strong>del</strong>la s<strong>al</strong>datura,è considerare cricche 2D. I fattori <strong>di</strong> intensità degli sforzi (SIF) sono ricavatida formule approssimate basate su an<strong>al</strong>isi agli elementi finiti o con me<strong>di</strong>anteBEM, e coprono la maggior parte dei casi <strong>di</strong> interesse pratico, figura 8.41. Perquanto riguarda la curva <strong>di</strong> propagazione un’ampia serie <strong>di</strong> risultati speriment<strong>al</strong>iha mostrato come la velocità <strong>di</strong> propagazione sia la stessa per <strong>di</strong>versi materi<strong>al</strong>is<strong>al</strong>dati (vedasi Fig. 8.40 per s<strong>al</strong>dature in acciaio).158
Figura 8.37: Difetti <strong>di</strong> s<strong>al</strong>datura: criccatura a freddo e a c<strong>al</strong>do [14].Figura 8.38: Difetti <strong>di</strong> s<strong>al</strong>datura: cavità e porosità [14].Figura 8.39: Difetti <strong>di</strong> s<strong>al</strong>datura: mancanza <strong>di</strong> fusione e <strong>di</strong> sufficiente penetrazione[14].159
Figura 8.40: Velocità <strong>di</strong> propagazione ricavata da prove <strong>di</strong> laboratorio su proviniprecriccati. Si noti che la velocità <strong>di</strong> propagazione non viene influenzata d<strong>al</strong> tipo <strong>di</strong>microstruttura.160
Figura 8.41: Fattori <strong>di</strong> intensità degli sforzi per giunti s<strong>al</strong>dati <strong>di</strong> <strong>di</strong>fferenti geometrie.Figura 8.42: Curve <strong>di</strong> propagazione a frattura per materi<strong>al</strong>i <strong>di</strong>versi.Questo risultato è inquadrabile nel comportamento a frattura dei materi<strong>al</strong>imet<strong>al</strong>lici in cui le <strong>di</strong>verse classi <strong>di</strong> materi<strong>al</strong>i (leghe Al, leghe Ti, acciai ferriticoperliticie martensitici) mostrano, <strong>al</strong>l’interno <strong>del</strong>la stessa classe, curve <strong>di</strong> propagazionemolto simili (vedasi Figura 8.42). I v<strong>al</strong>ori dei coefficienti <strong>del</strong>la curva <strong>di</strong>Paris pe questi materi<strong>al</strong>i sono riporati in Tabella 8.1.Legame tra curve S-N e frattureE’ interessante notare che d<strong>al</strong>la 8.16 possiamo ricavare:N f =costC · ∆S m (8.17)ovvero la pendenza <strong>del</strong> <strong>di</strong>agramma S-N è la stessa <strong>del</strong>la curva <strong>di</strong> Paris. Daquesto punto <strong>di</strong> vista si capisce come i <strong>di</strong>agrammi S − N previsti normativeabbiano una pendenza m 1 = 3 molto <strong>di</strong>versa dagli usu<strong>al</strong>i <strong>di</strong>agrammi S − N161
Materi<strong>al</strong>e C m(mm/cicloMP a √ m) macc. ferritici perlitici 6, 9 · <strong>10</strong> −9 3,0acc. austenitici 5, 6 · <strong>10</strong> −9 2,37075 T6 2, 7 · <strong>10</strong> −8 3,7Ti6Al4V 1, 0 · <strong>10</strong> −8 3,2Tabella 8.1: V<strong>al</strong>ori dei coefficienti <strong>del</strong>la legge <strong>di</strong> Paris per <strong>al</strong>cuni materi<strong>al</strong>i (R=0)[21]dei componenti (costruiti a partire d<strong>al</strong> <strong>di</strong>agramma S − N <strong>del</strong> materi<strong>al</strong>e), checorrisponde invece <strong>al</strong> m = 3 nella propagazione a frattura degli acciai.Una ulteriore conferma <strong>del</strong> fatto che il comportamento <strong>del</strong>le s<strong>al</strong>dature corrispondea quello <strong>di</strong> componenti che contengono fratture si ha d<strong>al</strong>la minoreefficienza s<strong>al</strong>dature in leghe Al. Infatti la minore efficienza non è descrivibilein termini <strong>di</strong> intaglio (le leghe Al hanno una minore sensibilità <strong>al</strong>l’intaglio).La <strong>di</strong>fferenza fondament<strong>al</strong>e sta nelle minori proprietà a frattura <strong>del</strong>le leghe Al:usu<strong>al</strong>mente hanno v<strong>al</strong>ori <strong>di</strong> ∆K th che sono pari <strong>al</strong> 30 − 50% dei v<strong>al</strong>ori tipici pergli acciai e, a pari ∆K, hanno velocità <strong>di</strong> propagazione maggiori.8.5 Accorgimenti <strong>di</strong> fabbricazione per aumentarela resistenza a faticaNella maggior parte dei casi il migliore accorgimento per aumentare la resistenzaa fatica dei giunti s<strong>al</strong>dati consiste in regole <strong>di</strong> buon progetto. D’<strong>al</strong>tro cantoperò la maggior parte <strong>del</strong>le misure adottate per incrementare la resistenza statica,essenzi<strong>al</strong>mente irrigi<strong>di</strong>menti e aumento <strong>del</strong>le sezioni che reggono i carichi,sono <strong>del</strong> tutto inefficaci se non <strong>del</strong>eterie, d<strong>al</strong> punto <strong>di</strong> vista <strong>del</strong>la resistenza afatica. Infatti un aumento <strong>del</strong>lo spessore dei cordoni e <strong>di</strong> lembi costituisce unaumento <strong>del</strong> fattore <strong>di</strong> concentrazione degli sforzi, che aumentano bruscamentein corrispondenza dei “rinforzi”.In gener<strong>al</strong>e, gli accorgimenti <strong>di</strong> processo per migliorare la resistenza <strong>di</strong> uncordone si possono classificare come segue:• miglioramento <strong>del</strong>la forma <strong>del</strong> cordone volta a <strong>di</strong>minuire le concentrazioni<strong>di</strong> sforzo• miglioramento <strong>del</strong>le con<strong>di</strong>zioni <strong>del</strong> materi<strong>al</strong>e <strong>del</strong> cordone attraverso larimozione <strong>di</strong> micropori, microinclusioni e microcriccature• introduzione <strong>di</strong> sforzi residui <strong>di</strong> compressione, favorevoli per l’aumento<strong>del</strong>la resistenza a fatica, nella zona <strong>del</strong>la s<strong>al</strong>datura• protezione d<strong>al</strong>la corrosione162
Figura 8.43: Molatura <strong>del</strong> cordone <strong>di</strong> s<strong>al</strong>datura. La soluzione b) ha efficacia,mentre la resistenza <strong>del</strong>la geometria a) è poco <strong>di</strong>fferente da quella <strong>del</strong> cordoneorigin<strong>al</strong>e.I princip<strong>al</strong>i processi per aumentare la resistenza sono:Molatura la molatura <strong>del</strong> cordone <strong>di</strong> s<strong>al</strong>datura ha lo scopo, oltre a ridurre ilK t complessivo, <strong>di</strong> eliminare le microcricche che si trovano nella zona <strong>di</strong>transizione tra il materi<strong>al</strong>e <strong>di</strong> riempimento e i lembi. Me<strong>di</strong>ante la molaturasi ottiene anche un leggero indurimento superfici<strong>al</strong>e. È comumque fondament<strong>al</strong>eche si re<strong>al</strong>izzi uno scavo profondo (figura 8.43), poiché <strong>al</strong>trimentinon si raggiunge l’effetto desiderato.TIG dressing l’uso <strong>del</strong>la tecnica <strong>di</strong> s<strong>al</strong>datura TIG, con la fusione loc<strong>al</strong>e <strong>del</strong>cordone migliora la forma <strong>del</strong> cordone e rimuove i microintagli che potrebberopresentarsi nel cordone. I migliori risultati si ottengono per s<strong>al</strong>daturetrasvers<strong>al</strong>i e per gli acciai ad elevata resistenza.Sovraccarico sollecitando la zona <strong>del</strong> cordone sopra il limite elastico con uncarico monotono, durante la successiva fase <strong>di</strong> scarico, si riescono a lasciaresforzi residui <strong>di</strong> compressione nella zona <strong>del</strong> piede <strong>del</strong>la s<strong>al</strong>datura.Sforzi residui un’<strong>al</strong>tra possibilità per introdurre sforzi residui <strong>di</strong> compressioneconsiste nella p<strong>al</strong>linatura (oppure <strong>di</strong> an<strong>al</strong>ogo trattamento tipo needlepeeningdei cordoni e soprattutto <strong>del</strong>la zona <strong>del</strong> piede <strong>del</strong>la s<strong>al</strong>datura.L’aumento <strong>del</strong>la resistenza a fatica a seguito degli accorgimenti <strong>di</strong> fabbricazionesono in<strong>di</strong>cati nella figura 8.44. A parte <strong>al</strong>cuni casi specifici, in<strong>di</strong>cazioni gener<strong>al</strong>i<strong>di</strong> come si possa tenere conto <strong>di</strong> questi accorgimenti nel c<strong>al</strong>colo possono esseretrovate in IIW.163
Figura 8.44: Aumento <strong>del</strong>la resistenza a fatica <strong>di</strong> acciai struttur<strong>al</strong>i (R = 0)re<strong>al</strong>izzato me<strong>di</strong>ante l’applicazione <strong>di</strong> <strong>di</strong>fferenti accorgimenti <strong>di</strong> fabbricazione.164
Bibliografia[1] S.P. Timoshenko, J.N. Goo<strong>di</strong>er. Theory of Elasticity. McGraw-Hill, 1982.[2] A.C. Ugur<strong>al</strong>, S.K. Fenster. Advanced Strength and Applied Elasticity.Prentice H<strong>al</strong>l, Upper Saddle River (NJ), 2003.[3] M. H. Sadd. Elasticity: Theory, Applications and Numerics. AcademicPress, Oxford, 2009.[4] P. Davoli, L. Vergani, S. Beretta, M. Guagliano, and S. Baragetti.<strong>Costruzione</strong> <strong>di</strong> Macchine 1. McGraw-Hill, Milano, 2007.[5] J.R. Barber. Elasticity. Kluwer Academic Publishers, 1992.[6] E. Bazzaro, C. Gorla, S. Miccoli. Lezioni <strong>di</strong> tecnica <strong>del</strong>le costruzionimeccaniche. Schonefeld - Ziegler, Milano, 2004.[7] W.D. Pilkey. Peterson’s Stress Concentration Factors. J. Wiley & Sons,New York, 1997.[8] Y. Murakami. Theory of Elasticity. Yokendo Ltd., Tokyo, 1997.[9] G. Belloni, A. Lo Conte. <strong>Costruzione</strong> <strong>di</strong> Macchine. Hoepli, Milano, 1990.[<strong>10</strong>] C. B. Biezeno, R. Grammel. Engineering Dynamics, volume 3. Blackie &Son, 1954.[11] O. Belluzzi. Scienza <strong>del</strong>le Costruzioni, volume 3. Zanichelli, 1988.[12] S.P. Timoshenko, S. Woinowsky-Krieger. Theory of Plates and Shells.McGraw-Hill Internation<strong>al</strong> E<strong>di</strong>tions, 1970.[13] A. Finzi S. Beretta, A. Bernasconi. An<strong>al</strong>isi <strong>del</strong>la resistenza a fatica hot spot<strong>di</strong> giunzioni s<strong>al</strong>date in ruote per autocarro. In Atti <strong>del</strong> XXXI ConvegnoNazion<strong>al</strong>e Associazione It<strong>al</strong>iana per l’An<strong>al</strong>isi <strong>del</strong>le Sollecitazioni (AIAS)Parma 2002.[14] C.M. Sonsino D. Radaj, W. Fricke. Fatigue strength assessment of weldedjoints by loc<strong>al</strong> approaches, Second E<strong>di</strong>tion. CRC Press, WoodheadPublishing, 2006.165
[15] CNR-UNI <strong>10</strong>011, Costruzioni in acciaio. Istruzioni per il c<strong>al</strong>colo,l’esecuzione, il collaudo e la manutenzione. UNI, 1988.[16] BS 7068, Code of practice for fatigue design and assessment of steelstructures. British Standards Institution, 1993.[17] EN 1993-1-9, Eurocode 3: Design of steel structures – Part 1-9: Fatigue.2005.[18] EN 1999-1-3 Eurocode 9, Design of <strong>al</strong>uminium structures Part 1-3:Structures susceptible to fatigue. 2007.[19] A. Hobbacher. Recommendations for fatigue design of welded joints andcomponents. Internation<strong>al</strong> Institute of Wel<strong>di</strong>ng, 2007.[20] S.J. Maddox E. Niemi, W. Fricke. Fatigue an<strong>al</strong>ysis of welded components(IIW-1439-00). CRC Press, Woodhead Publishing, 2006.[21] P.Davoli, A.Bernasconi, M.Filippini, S.Foletti. Comportamento meccanicodei materi<strong>al</strong>i. McGraw-Hill, Milano, 2005.166
Appen<strong>di</strong>ceUna lista <strong>del</strong>le correzioni e <strong>del</strong>le aggiunte nelle e<strong>di</strong>zioni per A.A. 20<strong>10</strong>-11:• nella revisione <strong>del</strong> 4 <strong>giugno</strong> 2011 corretta la simbologia per le iperstatiche<strong>di</strong> bordo nel recipiente in pressione (ora M e T );• nella revisione <strong>del</strong> 8 <strong>giugno</strong> 2011 rivisti gli esercizi <strong>del</strong> Cap. 5;• nella revisione <strong>del</strong> 7 maggio <strong>2012</strong> corretto errore formula τ ott ed introdottisforzi nei cilindri (Cap. 5);• nella revisione <strong>del</strong> <strong>10</strong> <strong>giugno</strong> <strong>2012</strong> corretto errore formula (7.60).167