Raymarine ST6001 - Zanshin
Raymarine ST6001 - Zanshin
Raymarine ST6001 - Zanshin

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
72 <strong>ST6001</strong>+ Autopilot Control Unit - Owner’s Handbook<br />
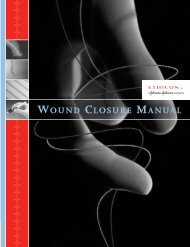
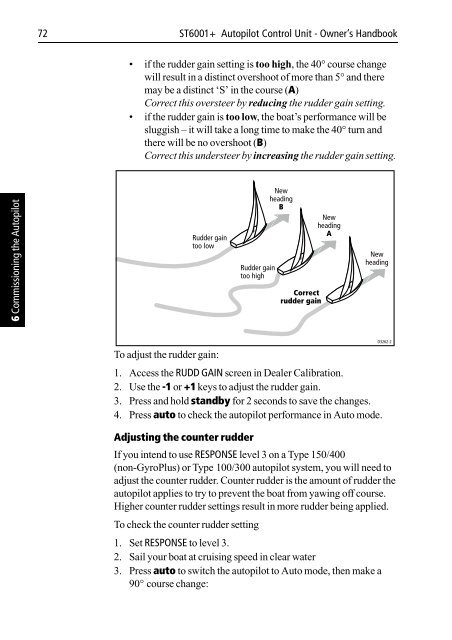
• if the rudder gain setting is too high, the 40° course change<br />
will result in a distinct overshoot of more than 5° and there<br />
may be a distinct ‘S’ in the course (A)<br />
Correct this oversteer by reducing the rudder gain setting.<br />
• if the rudder gain is too low, the boat’s performance will be<br />
sluggish – it will take a long time to make the 40° turn and<br />
there will be no overshoot (B)<br />
Correct this understeer by increasing the rudder gain setting.<br />
6 Commissioning the Autopilot<br />
Rudder gain<br />
too low<br />
Rudder gain<br />
too high<br />
New<br />
heading<br />
B<br />
Correct<br />
rudder gain<br />
New<br />
heading<br />
A<br />
New<br />
heading<br />
To adjust the rudder gain:<br />
1. Access the RUDD GAIN screen in Dealer Calibration.<br />
2. Use the -1 or +1 keys to adjust the rudder gain.<br />
3. Press and hold standby for 2 seconds to save the changes.<br />
4. Press auto to check the autopilot performance in Auto mode.<br />
Adjusting the counter rudder<br />
D3262-2<br />
If you intend to use RESPONSE level 3 on a Type 150/400<br />
(non-GyroPlus) or Type 100/300 autopilot system, you will need to<br />
adjust the counter rudder. Counter rudder is the amount of rudder the<br />
autopilot applies to try to prevent the boat from yawing off course.<br />
Higher counter rudder settings result in more rudder being applied.<br />
To check the counter rudder setting<br />
1. Set RESPONSE to level 3.<br />
2. Sail your boat at cruising speed in clear water<br />
3. Press auto to switch the autopilot to Auto mode, then make a<br />
90° course change: