
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Bouwverslag<br />
Arjan’s rijverslag<br />
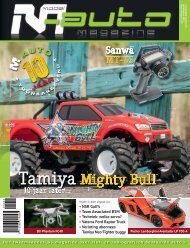
Als testlocatie hadden we gekozen voor de bigscale baan van MRCE te Elshout, dit is een echte zandbaan,<br />
dus een leuke plek voor een crossmotor. Terwijl Sjaak* op z’n gemakje de gevarengeldclausule<br />
van zijn CAO aan het nalezen was, waren Fred en ik bezig om de regelaar en de zender te laten samen<br />
werken. Dat was in het begin even lastig, maar nadat we de moeite hadden genomen om daadwerkelijk<br />
de beschrijving van de regelaar erbij te pakken ging het allemaal een stuk makkelijker. Okee, nu dus<br />
even snel een stukje proberen, binnen 3 meter proeft Sjaak dus al voor de eerste keer het zand, dit hebben<br />
we nog een keer of twee herhaald, voordat we merkten dat de servo de verkeerde kant op stuurde.<br />
Natuurlijk wel gekeken naar kleine dingetjes als stuuruitslag en zo, maar niet of het wel de juiste kant<br />
op was. Ach ja, ’t zijn details. Na deze kleine correctie kwamen we zeker toch al tot 6 meter en iets wat<br />
toch vaag leek op een poging een bocht in te sturen. Toch maar weer even terug naar de tafel. Onze<br />
theorie was dat de veren van de besturing strakker moesten staan. Deze zitten er eigenlijk om te abrupte<br />
stuurbewegingen in te dammen, maar het zorgde er ook voor dat de besturing ernstig reageerde<br />
op de hobbels en die komen soms wel eens voor op een zandbaan. De twee veren dus maar strakker<br />
gesteld, een tegenspartelende Sjaak weer terug op de motor gezet en maar weer proberen. Inmiddels<br />
hadden we ons testterrein verlegd naar het gras naast de baan om eerst maar even de basis te leren.<br />
Dit ging weer wat beter en nu kon Sjaak in een rechte lijn redelijk gerust blijven zitten. Nog maar eens<br />
proberen om een bocht te maken en meteen ging Sjaak op zoek naar een klavertje vier in het gras.<br />
Na nog wat bodemexcursies werden we langzaam maar zeker wijzer over een aantal zaken. In het begin<br />
renden we met de motor mee tot deze genoeg vaart had om zelf overeind te blijven, maar achteraf<br />
kon je ook eerst in de lucht gas geven om het vliegwiel dat in het achterwiel verwerkt zit op gang te<br />
brengen en zo vanuit stilstand al een ‘stabiele’ motor te hebben. Ook bleek dat je, om een bocht naar<br />
rechts te maken, je het beste heel even naar links kon sturen, zodat Sjaak de bocht in valt en daarna<br />
meteen naar rechts om de bocht te houden. De stuuruitslag stond trouwens inmiddels nog maar op<br />
25% van het maximum. Je kon makkelijker een bocht controleren door meer of minder gas te geven,<br />
dan meer of minder te sturen. Inmiddels was het mogelijk om op het gras een grote 8 te rijden. ’t Klinkt<br />
enorm knullig, maar op dat moment voelde het best als een prestatie. Al hadden we al wel door dat<br />
het een onbegonnen actie zou zijn om een volledige ronde te rijden over het circuit, daarvoor zouden<br />
we echt meer tijd nodig hebben om de ARx beter onder de knie te krijgen. We merkten wel dat op een<br />
gegeven moment de voorvering niet meer geheel vrijwillig terugkwam. Waarschijnlijk door het fijne<br />
stof van het zand dat toch een beetje tussen de nylon geleiding en de voorpoten is gaan zitten. Dit<br />
zal het beste op te lossen zijn met wat teflon spray of iets dergelijks, maar op dat moment hadden we<br />
even niets beters bij ons dan demperolie. Niet ideaal, maar op dat moment werkte het.<br />
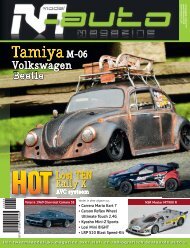
Nadat Sjaak voor vijfde keer deze dag had gebeld met zijn verzekeringsagent, over het ophogen van<br />
de levensverzekering, zijn we nog wel even terug naar de baan gegaan om wat foto’s te maken terwijl<br />
Sjaak over een bult gaat. Dit ging eigenlijk verrassend goed, het was een stuk makkelijker om Sjaak in<br />
de lucht rechtop te houden dan op de grond. Zelfs het landen ging goed tot groot genoegen van Sjaak<br />
die inmiddels al genoeg grond had gezien voor één dag.<br />
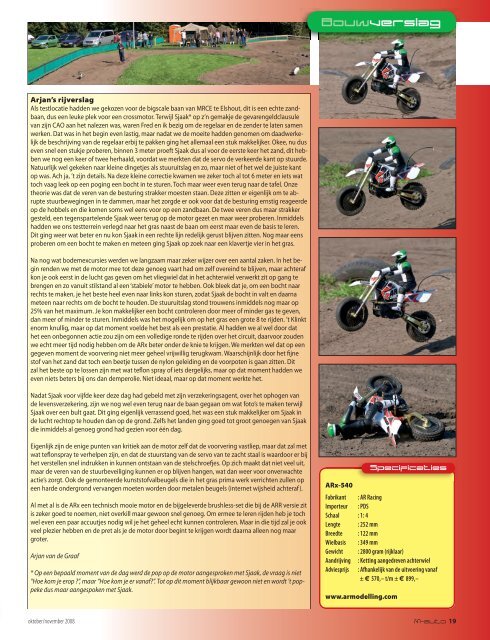
Eigenlijk zijn de enige punten van kritiek aan de motor zelf dat de voorvering vastliep, maar dat zal met<br />
wat teflonspray te verhelpen zijn, en dat de stuurstang van de servo van te zacht staal is waardoor er bij<br />
het verstellen snel indrukken in kunnen ontstaan van de stelschroefjes. Op zich maakt dat niet veel uit,<br />
maar de veren van de stuurbeveiliging kunnen er op blijven hangen, wat dan weer voor onverwachte<br />
actie’s zorgt. Ook de gemonteerde kunststofvalbeugels die in het gras prima werk verrichten zullen op<br />
een harde ondergrond vervangen moeten worden door metalen beugels (internet wijsheid achteraf).<br />
Al met al is de ARx een technisch mooie motor en de bijgeleverde brushless-set die bij de ARR versie zit<br />
is zeker goed te noemen, niet overkill maar gewoon snel genoeg. Om ermee te leren rijden heb je toch<br />
wel even een paar accuutjes nodig wil je het geheel echt kunnen controleren. Maar in die tijd zal je ook<br />
veel plezier hebben en de pret als je de motor door begint te krijgen wordt daarna alleen nog maar<br />
groter.<br />
Arjan van de Graaf<br />
* Op een bepaald moment van de dag werd de pop op de motor aangesproken met Sjaak, de vraag is niet<br />
“Hoe kom je erop ?”, maar “Hoe kom je er vanaf?”. Tot op dit moment blijkbaar gewoon niet en wordt ’t poppeke<br />
dus maar aangespoken met Sjaak.<br />
ARx-540<br />
Fabrikant : AR Racing<br />
Importeur : PDS<br />
Schaal : 1: 4<br />
Lengte : 252 mm<br />
Breedte : 122 mm<br />
Wielbasis : 349 mm<br />
Gewicht : <strong>28</strong>00 gram (rijklaar)<br />
Aandrijving : Ketting aangedreven achterwiel<br />
Adviesprijs : Afhankelijk van de uitvoering vanaf<br />
± € 570,– t/m ± € 899,–<br />
www.armodelling.com<br />
Specificaties<br />
oktober/november 2008 M-<strong>auto</strong> 19