Cieplne właściwości dynamiczne grzejnika podłogowego
Cieplne właściwości dynamiczne grzejnika podłogowego
Cieplne właściwości dynamiczne grzejnika podłogowego

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Cieplne</strong> <strong>właściwości</strong> <strong>dynamiczne</strong> <strong>grzejnika</strong> <strong>podłogowego</strong><br />
W opisie automatycznej regulacji stosuje się wiele metod identyfikacji obiektów sterowania.<br />
Wyróżnia się przy tym metody teoretyczne (opisane szczegółowo w [22], [38] i [146]) oraz<br />
metody numeryczne [68].<br />
części:<br />
Zgodnie z [146] opis matematyczny ciągłego elementu automatyki składa się z dwóch<br />
1. Równania lub wykresu charakterystyki statycznej, określających zależność wyjścia od<br />
wejścia w stanach ustalonych,<br />
2. Równania różniczkowego lub operatorowego, opisującego <strong>właściwości</strong> statyczne<br />
i <strong>dynamiczne</strong> w otoczeniu wybranego na charakterystyce statycznej punktu pracy.<br />
Wymagania punktu pierwszego opisane zostały szczegółowo w pracy [55]. Podano<br />
tam <strong>właściwości</strong> statyczne badanego obiektu, którym jest grzejnik podłogowy oraz omówiono<br />
metody konstruowania charakterystyk statycznych <strong>grzejnika</strong>. Realizacja punktu drugiego, ze<br />
względu na skomplikowaną postać równań różniczkowych opisujących przekazywanie ciepła<br />
w tym układzie, wymaga – dla rozwiązania problemu – przeprowadzenia złożonej analizy.<br />
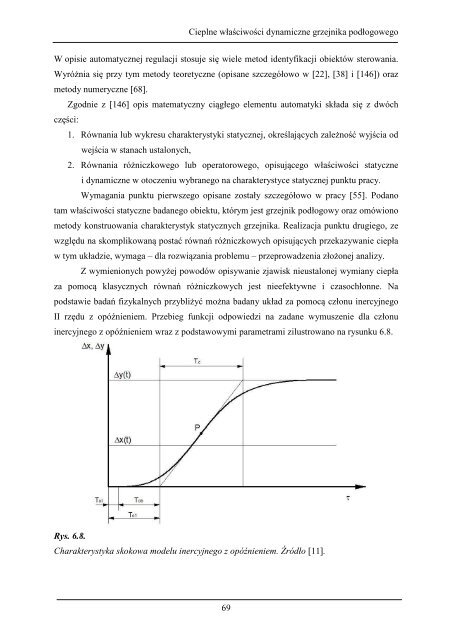
Z wymienionych powyżej powodów opisywanie zjawisk nieustalonej wymiany ciepła<br />
za pomocą klasycznych równań różniczkowych jest nieefektywne i czasochłonne. Na<br />
podstawie badań fizykalnych przybliżyć można badany układ za pomocą członu inercyjnego<br />
II rzędu z opóźnieniem. Przebieg funkcji odpowiedzi na zadane wymuszenie dla członu<br />
inercyjnego z opóźnieniem wraz z podstawowymi parametrami zilustrowano na rysunku 6.8.<br />
Rys. 6.8.<br />
Charakterystyka skokowa modelu inercyjnego z opóźnieniem. Źródło [11].<br />
69