

PDF 8.939kB - Hochschule Ulm
PDF 8.939kB - Hochschule Ulm
PDF 8.939kB - Hochschule Ulm

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
4 Objektverfolgung<br />
4.1 Einleitung<br />
Die Objektverfolgung (engl. Particle Tracking oder Object Tracking) hat sich in den letzten<br />
Jahren zunehmend zu einer wichtigen Technologie innerhalb der Bildsequenzanalyse entwickelt.<br />
Sie verfolgt das Ziel, ein digitales Objekt kontinuierlich in einer Bildsequenz zu verfolgen<br />
um Rückschlüsse auf dessen Bewegung ziehen zu können. Anwendungsgebiete dieser<br />
Technik finden sich überwiegend in der Überwachung des Straßen-, Luft- und Schiffsverkehr.<br />
Grundsätzlich lässt sich die Objektverfolgung in drei Teilaufgaben aufteilen:<br />
ˆ Dynamische Zustandsschätzung (Filterung),<br />
ˆ Datenassoziation,<br />
ˆ Verwaltung der Objektpfade.<br />
Die dynamische Zustandsschätzung beschäftigt sich dabei mit der Schätzung der Zustände<br />
eines Systems. Zustände bzw. Zustandsgrößen beschreiben den momentanen Zustand (z.B.<br />
Größe, Position, Geschwindigkeit) eines dynamischen Systems (z.B. Bewegungsmodell). Die<br />
Notwendigkeit einer derartigen Filterung ergibt sich aus der Tatsache, dass benötigte Zustandsgrößen<br />
sich oftmals nicht direkt durch Sensoren erfassen lassen. Auch muss man bei<br />
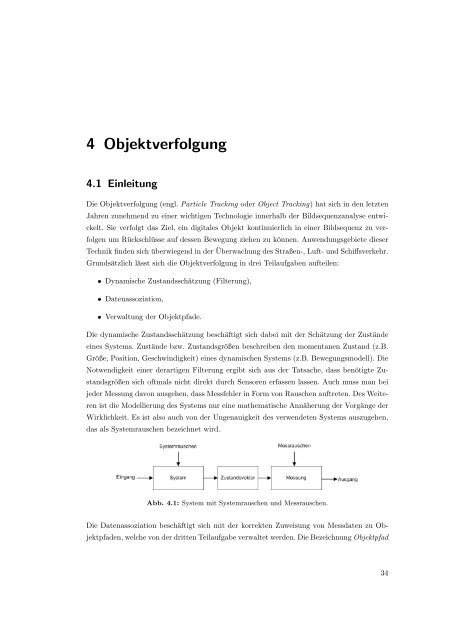
jeder Messung davon ausgehen, dass Messfehler in Form von Rauschen auftreten. Des Weiteren<br />
ist die Modellierung des Systems nur eine mathematische Annäherung der Vorgänge der<br />
Wirklichkeit. Es ist also auch von der Ungenauigkeit des verwendeten Systems auszugehen,<br />
das als Systemrauschen bezeichnet wird.<br />
Abb. 4.1: System mit Systemrauschen und Messrauschen.<br />
Die Datenassoziation beschäftigt sich mit der korrekten Zuweisung von Messdaten zu Objektpfaden,<br />
welche von der dritten Teilaufgabe verwaltet werden. Die Bezeichnung Objektpfad<br />
34














