PDF 8.939kB - Hochschule Ulm
PDF 8.939kB - Hochschule Ulm
PDF 8.939kB - Hochschule Ulm

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Kapitel 7. Versuchauswertung mittels Objekverfolgung<br />
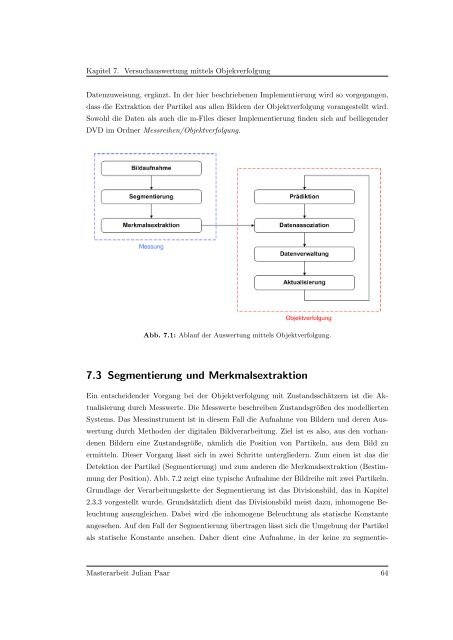
Datenzuweisung, ergänzt. In der hier beschriebenen Implementierung wird so vorgegangen,<br />
dass die Extraktion der Partikel aus allen Bildern der Objektverfolgung vorangestellt wird.<br />
Sowohl die Daten als auch die m-Files dieser Implementierung finden sich auf beiliegender<br />
DVD im Ordner Messreihen/Objektverfolgung.<br />
Abb. 7.1: Ablauf der Auswertung mittels Objektverfolgung.<br />
7.3 Segmentierung und Merkmalsextraktion<br />
Ein entscheidender Vorgang bei der Objektverfolgung mit Zustandsschätzern ist die Aktualisierung<br />
durch Messwerte. Die Messwerte beschreiben Zustandsgrößen des modellierten<br />
Systems. Das Messinstrument ist in diesem Fall die Aufnahme von Bildern und deren Auswertung<br />
durch Methoden der digitalen Bildverarbeitung. Ziel ist es also, aus den vorhandenen<br />
Bildern eine Zustandsgröße, nämlich die Position von Partikeln, aus dem Bild zu<br />
ermitteln. Dieser Vorgang lässt sich in zwei Schritte untergliedern. Zum einen ist das die<br />
Detektion der Partikel (Segmentierung) und zum anderen die Merkmalsextraktion (Bestimmung<br />
der Position). Abb. 7.2 zeigt eine typische Aufnahme der Bildreihe mit zwei Partikeln.<br />
Grundlage der Verarbeitungskette der Segmentierung ist das Divisionsbild, das in Kapitel<br />
2.3.3 vorgestellt wurde. Grundsätzlich dient das Divisionsbild meist dazu, inhomogene Beleuchtung<br />
auszugleichen. Dabei wird die inhomogene Beleuchtung als statische Konstante<br />
angesehen. Auf den Fall der Segmentierung übertragen lässt sich die Umgebung der Partikel<br />
als statische Konstante ansehen. Daher dient eine Aufnahme, in der keine zu segmentie-<br />
Masterarbeit Julian Paar 64