

PDF 8.939kB - Hochschule Ulm
PDF 8.939kB - Hochschule Ulm
PDF 8.939kB - Hochschule Ulm

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Kapitel 4. Objektverfolgung<br />
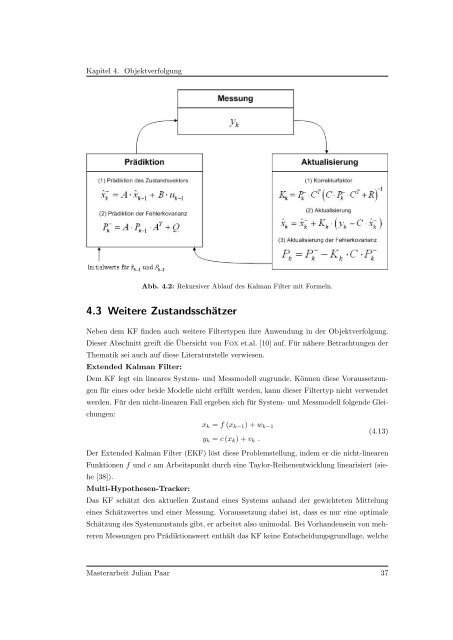
Abb. 4.2: Rekursiver Ablauf des Kalman Filter mit Formeln.<br />
4.3 Weitere Zustandsschätzer<br />
Neben dem KF finden auch weitere Filtertypen ihre Anwendung in der Objektverfolgung.<br />
Dieser Abschnitt greift die Übersicht von Fox et.al. [10] auf. Für nähere Betrachtungen der<br />
Thematik sei auch auf diese Literaturstelle verwiesen.<br />
Extended Kalman Filter:<br />
Dem KF legt ein lineares System- und Messmodell zugrunde. Können diese Voraussetzungen<br />
für eines oder beide Modelle nicht erfüllt werden, kann dieser Filtertyp nicht verwendet<br />
werden. Für den nicht-linearen Fall ergeben sich für System- und Messmodell folgende Gleichungen:<br />
x k = f (x k−1 ) + w k−1<br />
(4.13)<br />
y k = c(x k ) + v k .<br />
Der Extended Kalman Filter (EKF) löst diese Problemstellung, indem er die nicht-linearen<br />
Funktionen f und c am Arbeitspunkt durch eine Taylor-Reihenentwicklung linearisiert (siehe<br />
[38]).<br />
Multi-Hypothesen-Tracker:<br />
Das KF schätzt den aktuellen Zustand eines Systems anhand der gewichteten Mittelung<br />
eines Schätzwertes und einer Messung. Voraussetzung dabei ist, dass es nur eine optimale<br />
Schätzung des Systemzustands gibt, er arbeitet also unimodal. Bei Vorhandensein von mehreren<br />
Messungen pro Prädiktionswert enthält das KF keine Entscheidungsgrundlage, welche<br />
Masterarbeit Julian Paar 37














