

3.22EjemploDRM007 Co..
3.22EjemploDRM007 Co..
3.22EjemploDRM007 Co..

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
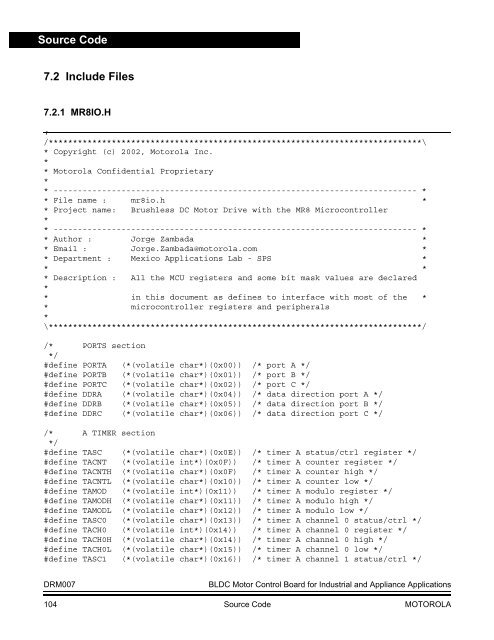
Source <strong>Co</strong>de<br />
7.2 Include Files<br />
7.2.1 MR8IO.H<br />
;<br />
/*****************************************************************************\<br />
* <strong>Co</strong>pyright (c) 2002, Motorola Inc.<br />
*<br />
* Motorola <strong>Co</strong>nfidential Proprietary<br />
*<br />
* --------------------------------------------------------------------------- *<br />
* File name : mr8io.h *<br />
* Project name: Brushless DC Motor Drive with the MR8 Microcontroller<br />
*<br />
* --------------------------------------------------------------------------- *<br />
* Author : Jorge Zambada *<br />
* Email : Jorge.Zambada@motorola.com *<br />
* Department : Mexico Applications Lab - SPS *<br />
* *<br />
* Description : All the MCU registers and some bit mask values are declared<br />
*<br />
* in this document as defines to interface with most of the *<br />
* microcontroller registers and peripherals<br />
*<br />
\*****************************************************************************/<br />
/* PORTS section<br />
*/<br />
#define PORTA (*(volatile char*)(0x00)) /* port A */<br />
#define PORTB (*(volatile char*)(0x01)) /* port B */<br />
#define PORTC (*(volatile char*)(0x02)) /* port C */<br />
#define DDRA (*(volatile char*)(0x04)) /* data direction port A */<br />
#define DDRB (*(volatile char*)(0x05)) /* data direction port B */<br />
#define DDRC (*(volatile char*)(0x06)) /* data direction port C */<br />
/* A TIMER section<br />
*/<br />
#define TASC (*(volatile char*)(0x0E)) /* timer A status/ctrl register */<br />
#define TACNT (*(volatile int*)(0x0F)) /* timer A counter register */<br />
#define TACNTH (*(volatile char*)(0x0F) /* timer A counter high */<br />
#define TACNTL (*(volatile char*)(0x10)) /* timer A counter low */<br />
#define TAMOD (*(volatile int*)(0x11)) /* timer A modulo register */<br />
#define TAMODH (*(volatile char*)(0x11)) /* timer A modulo high */<br />
#define TAMODL (*(volatile char*)(0x12)) /* timer A modulo low */<br />
#define TASC0 (*(volatile char*)(0x13)) /* timer A channel 0 status/ctrl */<br />
#define TACH0 (*(volatile int*)(0x14)) /* timer A channel 0 register */<br />
#define TACH0H (*(volatile char*)(0x14)) /* timer A channel 0 high */<br />
#define TACH0L (*(volatile char*)(0x15)) /* timer A channel 0 low */<br />
#define TASC1 (*(volatile char*)(0x16)) /* timer A channel 1 status/ctrl */<br />
DRM007<br />
BLDC Motor <strong>Co</strong>ntrol Board for Industrial and Appliance Applications<br />
104 Source <strong>Co</strong>de MOTOROLA













