

3.22EjemploDRM007 Co..
3.22EjemploDRM007 Co..
3.22EjemploDRM007 Co..

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
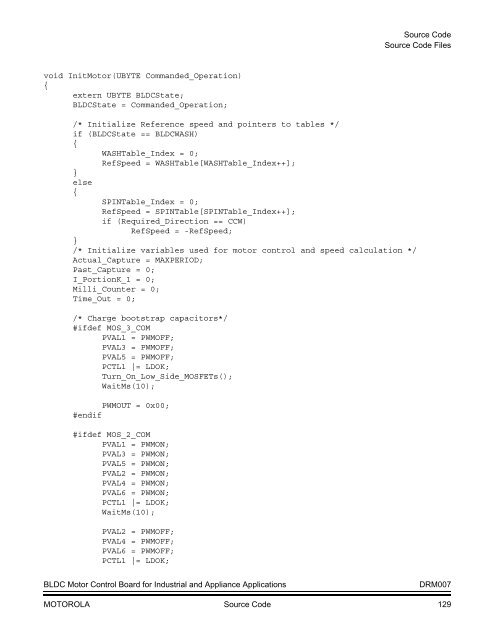
Source <strong>Co</strong>de<br />
Source <strong>Co</strong>de Files<br />
void InitMotor(UBYTE <strong>Co</strong>mmanded_Operation)<br />
{<br />
extern UBYTE BLDCState;<br />
BLDCState = <strong>Co</strong>mmanded_Operation;<br />
/* Initialize Reference speed and pointers to tables */<br />
if (BLDCState == BLDCWASH)<br />
{<br />
WASHTable_Index = 0;<br />
RefSpeed = WASHTable[WASHTable_Index++];<br />
}<br />
else<br />
{<br />
SPINTable_Index = 0;<br />
RefSpeed = SPINTable[SPINTable_Index++];<br />
if (Required_Direction == CCW)<br />
RefSpeed = -RefSpeed;<br />
}<br />
/* Initialize variables used for motor control and speed calculation */<br />
Actual_Capture = MAXPERIOD;<br />
Past_Capture = 0;<br />
I_PortionK_1 = 0;<br />
Milli_<strong>Co</strong>unter = 0;<br />
Time_Out = 0;<br />
/* Charge bootstrap capacitors*/<br />
#ifdef MOS_3_COM<br />
PVAL1 = PWMOFF;<br />
PVAL3 = PWMOFF;<br />
PVAL5 = PWMOFF;<br />
PCTL1 |= LDOK;<br />
Turn_On_Low_Side_MOSFETs();<br />
WaitMs(10);<br />
PWMOUT = 0x00;<br />
#endif<br />
#ifdef MOS_2_COM<br />
PVAL1 = PWMON;<br />
PVAL3 = PWMON;<br />
PVAL5 = PWMON;<br />
PVAL2 = PWMON;<br />
PVAL4 = PWMON;<br />
PVAL6 = PWMON;<br />
PCTL1 |= LDOK;<br />
WaitMs(10);<br />
PVAL2 = PWMOFF;<br />
PVAL4 = PWMOFF;<br />
PVAL6 = PWMOFF;<br />
PCTL1 |= LDOK;<br />
BLDC Motor <strong>Co</strong>ntrol Board for Industrial and Appliance Applications<br />
DRM007<br />
MOTOROLA Source <strong>Co</strong>de 129













