

3.22EjemploDRM007 Co..
3.22EjemploDRM007 Co..
3.22EjemploDRM007 Co..

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Software Design <strong>Co</strong>nsiderations<br />
TIMA_OV_ISR<br />
1<br />
Dif_Capture =<br />
Actual_Capture -<br />
Past_Capture<br />
newPWM =<br />
(<strong>Co</strong>ntroller Output<br />
/ 256) + 128<br />
Dif_Capture <<br />
MINCAPTURE<br />
YES<br />
Speed =<br />
MAXSPEED<br />
MotorStalled<br />
Protection<br />
NO<br />
Dif_Capture ><br />
MAXCAPTURE<br />
YES<br />
Speed =<br />
MINSPEED<br />
Milli<strong>Co</strong>unter =<br />
Milli<strong>Co</strong>unter + 1<br />
2<br />
NO<br />
Milli<strong>Co</strong>unter > 10<br />
NO<br />
Speed = 1665 /<br />
(Dif_Capture / 18)<br />
YES<br />
End<br />
Milli<strong>Co</strong>unter = 0<br />
YES<br />
Actual_Direction =<br />
CCW<br />
YES<br />
Speed = -Speed<br />
NO<br />
BLDCState =<br />
BLDCWASH<br />
NO<br />
End of SPIN<br />
Table<br />
PI_<strong>Co</strong>ntroller<br />
YES<br />
NO<br />
<strong>Co</strong>ntroller<br />
Output < 0<br />
YES<br />
<strong>Co</strong>ntroller Output<br />
= -<strong>Co</strong>ntroller<br />
Output<br />
Speed Reference<br />
= WASHTable<br />
[index++]<br />
Speed Reference<br />
= SPINTable<br />
[index++]<br />
NO<br />
NO<br />
Required Direction<br />
= CW<br />
Required Direction<br />
= CCW<br />
2<br />
Required<br />
Direction =<br />
CCW<br />
YES<br />
1<br />
Speed Reference<br />
= -Speed<br />
Reference<br />
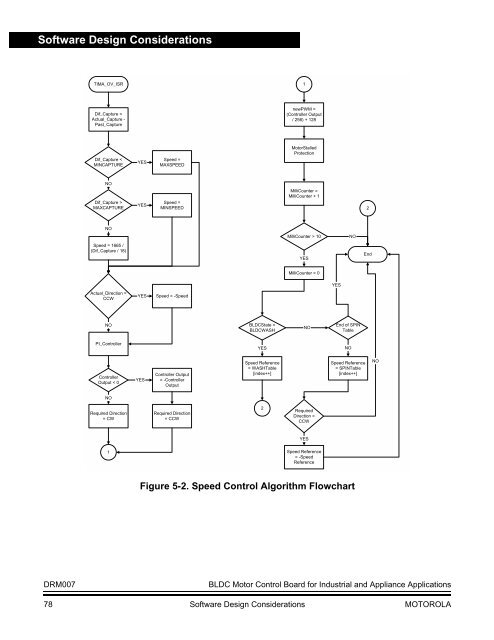
Figure 5-2. Speed <strong>Co</strong>ntrol Algorithm Flowchart<br />
DRM007<br />
BLDC Motor <strong>Co</strong>ntrol Board for Industrial and Appliance Applications<br />
78 Software Design <strong>Co</strong>nsiderations MOTOROLA













