

3.22EjemploDRM007 Co..
3.22EjemploDRM007 Co..
3.22EjemploDRM007 Co..

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Software Design <strong>Co</strong>nsiderations<br />
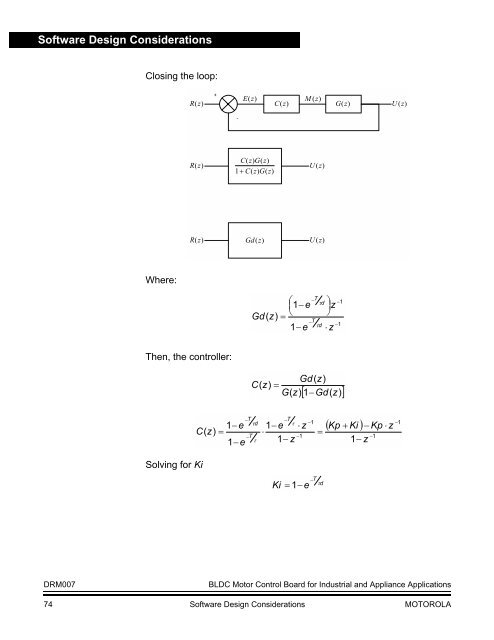
Closing the loop:<br />
+<br />
E(z)<br />
M (z)<br />
R (z)<br />
C (z)<br />
G(z)<br />
U (z)<br />
-<br />
R(z)<br />
C(<br />
z)<br />
G(<br />
z)<br />
1+<br />
C(<br />
z)<br />
G(<br />
z)<br />
U (z)<br />
R (z)<br />
Gd(z)<br />
U (z)<br />
Where:<br />
⎛<br />
⎜1<br />
− e<br />
Gd(<br />
z)<br />
=<br />
⎝<br />
−<br />
1−<br />
e<br />
−T<br />
τd<br />
T<br />
τd<br />
⎞<br />
⎟z<br />
⎠<br />
⋅ z<br />
−1<br />
−1<br />
Then, the controller:<br />
C<br />
Gd(<br />
z)<br />
C(<br />
z)<br />
=<br />
G(<br />
z) 1<br />
Solving for Ki<br />
Ki = 1−e<br />
[ −Gd(<br />
z)<br />
]<br />
( Kp + Ki )<br />
−T<br />
−T<br />
1<br />
( τd<br />
τ −<br />
1−<br />
e 1−e<br />
⋅ z<br />
−<br />
z)<br />
= ⋅<br />
=<br />
−T<br />
−1<br />
− 1<br />
τ<br />
1−e<br />
1−<br />
z<br />
−T<br />
τd<br />
Kp ⋅ z<br />
1−<br />
z<br />
−1<br />
DRM007<br />
BLDC Motor <strong>Co</strong>ntrol Board for Industrial and Appliance Applications<br />
74 Software Design <strong>Co</strong>nsiderations MOTOROLA













