

3.22EjemploDRM007 Co..
3.22EjemploDRM007 Co..
3.22EjemploDRM007 Co..

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Source <strong>Co</strong>de<br />
Source <strong>Co</strong>de Files<br />
/*****************************************************************************\<br />
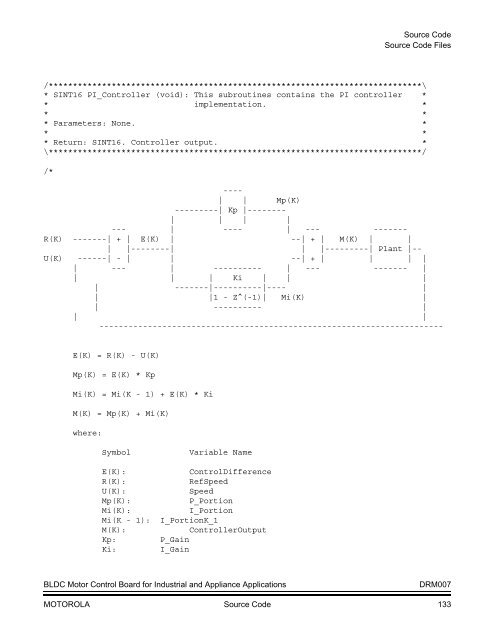
* SINT16 PI_<strong>Co</strong>ntroller (void): This subroutines contains the PI controller *<br />
* implementation. *<br />
* *<br />
* Parameters: None. *<br />
* *<br />
* Return: SINT16. <strong>Co</strong>ntroller output. *<br />
\*****************************************************************************/<br />
/*<br />
----<br />
| | Mp(K)<br />
---------| Kp |--------<br />
| | | |<br />
--- | ---- | --- -------<br />
R(K) -------| + | E(K) | --| + | M(K) | |<br />
| |--------| | |---------| Plant |--<br />
U(K) ------| - | | --| + | | | |<br />
| --- | ---------- | --- ------- |<br />
| | | Ki | | |<br />
| -------|----------|---- |<br />
| |1 - Z^(-1)| Mi(K) |<br />
| ---------- |<br />
| |<br />
-----------------------------------------------------------------------<br />
E(K) = R(K) - U(K)<br />
Mp(K) = E(K) * Kp<br />
Mi(K) = Mi(K - 1) + E(K) * Ki<br />
M(K) = Mp(K) + Mi(K)<br />
where:<br />
Symbol<br />
Variable Name<br />
E(K):<br />
<strong>Co</strong>ntrolDifference<br />
R(K):<br />
RefSpeed<br />
U(K):<br />
Speed<br />
Mp(K):<br />
P_Portion<br />
Mi(K):<br />
I_Portion<br />
Mi(K - 1): I_PortionK_1<br />
M(K):<br />
<strong>Co</strong>ntrollerOutput<br />
Kp:<br />
P_Gain<br />
Ki:<br />
I_Gain<br />
BLDC Motor <strong>Co</strong>ntrol Board for Industrial and Appliance Applications<br />
DRM007<br />
MOTOROLA Source <strong>Co</strong>de 133













