

Simulation numérique et expérimentale du comportement ...
Simulation numérique et expérimentale du comportement ...
Simulation numérique et expérimentale du comportement ...
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
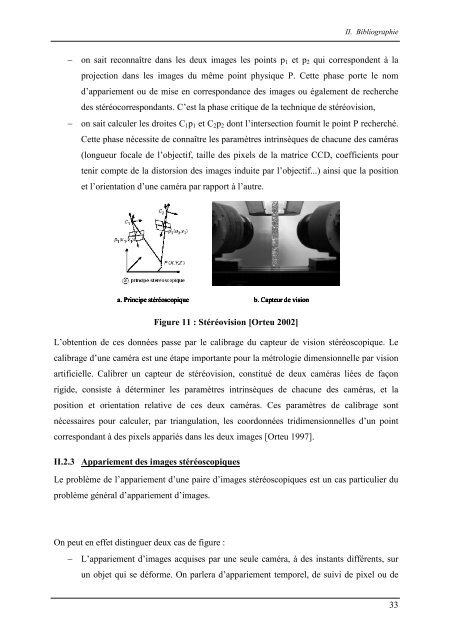
II. Bibliographieon sait reconnaître dans les deux images les points p 1 <strong>et</strong> p 2 qui correspondent à laprojection dans les images <strong>du</strong> même point physique P. C<strong>et</strong>te phase porte le nomd’appariement ou de mise en correspondance des images ou également de recherchedes stéréocorrespondants. C’est la phase critique de la technique de stéréovision,on sait calculer les droites C 1 p 1 <strong>et</strong> C 2 p 2 dont l’intersection fournit le point P recherché.C<strong>et</strong>te phase nécessite de connaître les paramètres intrinsèques de chacune des caméras(longueur focale de l’objectif, taille des pixels de la matrice CCD, coefficients pourtenir compte de la distorsion des images in<strong>du</strong>ite par l’objectif...) ainsi que la position<strong>et</strong> l’orientation d’une caméra par rapport à l’autre.a. Principe stéréoscopique b. Capteur de visionFigure 11 : Stéréovision [Orteu 2002]L’obtention de ces données passe par le calibrage <strong>du</strong> capteur de vision stéréoscopique. Lecalibrage d’une caméra est une étape importante pour la métrologie dimensionnelle par visionartificielle. Calibrer un capteur de stéréovision, constitué de deux caméras liées de façonrigide, consiste à déterminer les paramètres intrinsèques de chacune des caméras, <strong>et</strong> laposition <strong>et</strong> orientation relative de ces deux caméras. Ces paramètres de calibrage sontnécessaires pour calculer, par triangulation, les coordonnées tridimensionnelles d’un pointcorrespondant à des pixels appariés dans les deux images [Orteu 1997].II.2.3 Appariement des images stéréoscopiquesLe problème de l’appariement d’une paire d’images stéréoscopiques est un cas particulier <strong>du</strong>problème général d’appariement d’images.On peut en eff<strong>et</strong> distinguer deux cas de figure : L’appariement d’images acquises par une seule caméra, à des instants différents, surun obj<strong>et</strong> qui se déforme. On parlera d’appariement temporel, de suivi de pixel ou de33













