algirdas ambrazeviËcius iËvadas iË kokybin Ëe paprastuËju ...
algirdas ambrazeviËcius iËvadas iË kokybin Ëe paprastuËju ...
algirdas ambrazeviËcius iËvadas iË kokybin Ëe paprastuËju ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
1.4. AUTONOMINĖS LYGTYS PLOKŠTUMOJE 21<br />
x 2 . .<br />
x 2<br />
. . . . . .<br />
. .<br />
..<br />
..<br />
. .<br />
.<br />
.<br />
.<br />
.<br />
..<br />
..<br />
. .<br />
. .<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
..<br />
x 1 x 1<br />
. .<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
. .<br />
. .<br />
.<br />
.<br />
.<br />
.<br />
..<br />
. . . . . .<br />
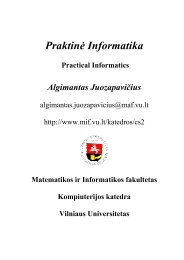
4 P a v y z d y s . Sistema<br />
1.19 pav. 1.20 pav.<br />
ẋ 1 = x 2 , ẋ 2 = −x 1 (1.25)<br />
turi pusiausvyros tašką (0, 0). Apibrėžkime polines koordinates<br />
Naujose koordinatėse gausime sistemą<br />
kurios sprendiniai<br />
x 1 = r cos ϕ, x 2 = r sin ϕ.<br />
ṙ = 0, ˙ϕ = −1,<br />
r = C 1 , ϕ = −t + C 2 .<br />
Grįžę prie senu˛ kintamu˛ju˛ x 1 , x 2 , rasime (1.25) sistemos sprendinius<br />
x 1 (t) = C 1 cos(−t + C 2 ), x 2 (t) = C 1 sin(−t + C 2 ), t ∈ (−∞, ∞).<br />
Iš šiu˛ formuliu˛ eliminavę kintamąjį t, gausime, kad sprendiniai x 1 , x 2 tenkina lygtį<br />
x 2 1 + x 2 2 = C 2 , C = C 1 .<br />
Iš (1.25) lygties išplaukia, kad pusplokštumėje x 2 > 0 sprendinys x 1 didėja, o pusplokštumėje<br />
x 2 < 0 – mažėja. Be to, pusplokštumėje x 1 > 0 sprendinys x 2 mažėja,<br />
o pusplokštumėje x 1 < 0 – didėja. Taigi (1.25) sistemos trajektorijos yra koncentruoti<br />
apskritimai su centru pusiausvyros taške (0, 0) ir apėjimo kryptimi pagal laikrodžio<br />
rodyklę, kai laikas t didėja. Fazinis (1.25) sistemos portretas pavaizduotas 1.20 paveikslėlyje.<br />
5 P a v y z d y s . Sistema<br />
ẋ 1 = x 1 , ẋ 2 = x 1 + x 2 (1.26)