

Styresystem for kybernetisk håndleddsprotese - NTNU
Styresystem for kybernetisk håndleddsprotese - NTNU
Styresystem for kybernetisk håndleddsprotese - NTNU

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Kapittel 1<br />
Innledning<br />
1.1 Bakgrunn <strong>for</strong> oppgaven<br />
Denne oppgaven har sin bakgrunn i et pågående <strong>for</strong>skningsprosjekt som er et<br />
samarbeid mellom <strong>NTNU</strong> og University of New Brunswick, Canada. I Øyvind<br />
Stavdahls doktoravhandling [9] viste målinger gjort på friske håndledd et større<br />
repertoar av bevegelser når håndleddets rotasjonsakse stod skrått på underar-<br />
mens lengdeakse. For å finne ut om disse resultatene kan brukes <strong>for</strong> å gjøre det<br />
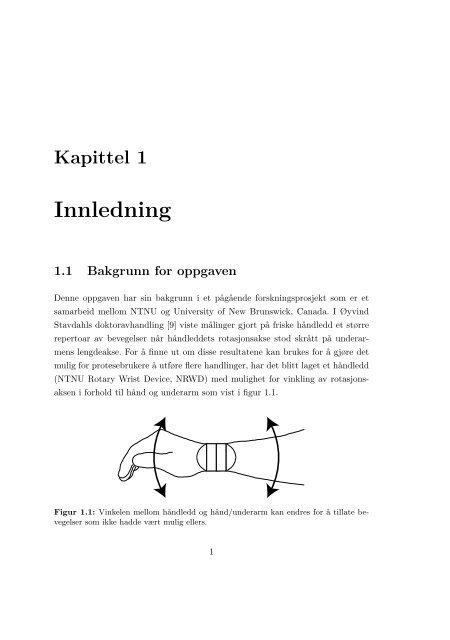
mulig <strong>for</strong> protesebrukere å utføre flere handlinger, har det blitt laget et håndledd<br />
(<strong>NTNU</strong> Rotary Wrist Device, NRWD) med mulighet <strong>for</strong> vinkling av rotasjons-<br />
aksen i <strong>for</strong>hold til hånd og underarm som vist i figur 1.1.<br />
Figur 1.1: Vinkelen mellom håndledd og hånd/underarm kan endres <strong>for</strong> å tillate bevegelser<br />
som ikke hadde vært mulig ellers.<br />
1













