

Styresystem for kybernetisk håndleddsprotese - NTNU
Styresystem for kybernetisk håndleddsprotese - NTNU
Styresystem for kybernetisk håndleddsprotese - NTNU

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Kapittel 2. Styring av børsteløs DC-motor 12<br />
være, bør en med sensorer velges. I denne oppgaven brukes en motor med sensorer.<br />
0<br />
0°<br />
For mer teori om børsteløse motorer, henvises det til [8].<br />
180˚<br />
120˚ 60˚<br />
S<br />
N<br />
a’ a<br />
240˚ 300˚<br />
(a)<br />
60° 120° 180° 240° 300° 360°<br />
(b)<br />
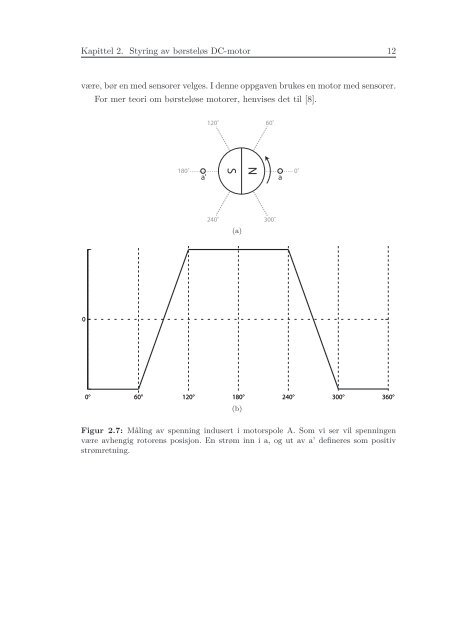
Figur 2.7: Måling av spenning indusert i motorspole A. Som vi ser vil spenningen<br />
være avhengig rotorens posisjon. En strøm inn i a, og ut av a’ defineres som positiv<br />
strømretning.<br />
0˚













