

Styresystem for kybernetisk håndleddsprotese - NTNU
Styresystem for kybernetisk håndleddsprotese - NTNU
Styresystem for kybernetisk håndleddsprotese - NTNU

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Kapittel 4<br />
Spesifisering og<br />
toppnivå-design<br />
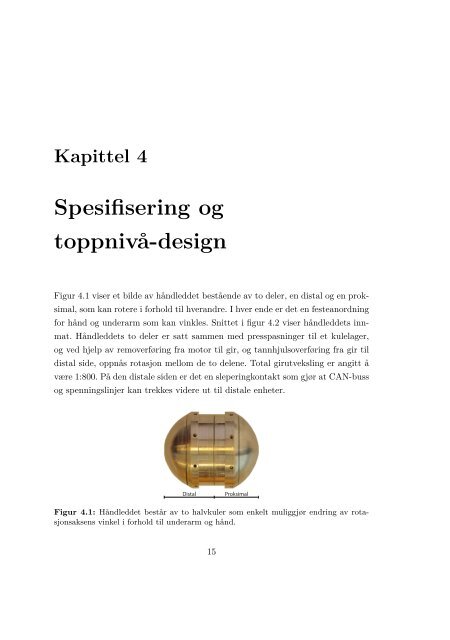
Figur 4.1 viser et bilde av håndleddet bestående av to deler, en distal og en prok-<br />
simal, som kan rotere i <strong>for</strong>hold til hverandre. I hver ende er det en festeanordning<br />
<strong>for</strong> hånd og underarm som kan vinkles. Snittet i figur 4.2 viser håndleddets inn-<br />
mat. Håndleddets to deler er satt sammen med presspasninger til et kulelager,<br />
og ved hjelp av removerføring fra motor til gir, og tannhjulsoverføring fra gir til<br />
distal side, oppnås rotasjon mellom de to delene. Total girutveksling er angitt å<br />
være 1:800. På den distale siden er det en sleperingkontakt som gjør at CAN-buss<br />
og spenningslinjer kan trekkes videre ut til distale enheter.<br />
Distal<br />
Proksimal<br />
Figur 4.1: Håndleddet består av to halvkuler som enkelt muliggjør endring av rotasjonsaksens<br />
vinkel i <strong>for</strong>hold til underarm og hånd.<br />
15













