

Styresystem for kybernetisk håndleddsprotese - NTNU
Styresystem for kybernetisk håndleddsprotese - NTNU
Styresystem for kybernetisk håndleddsprotese - NTNU

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Kapittel 6. Implementasjon 40<br />
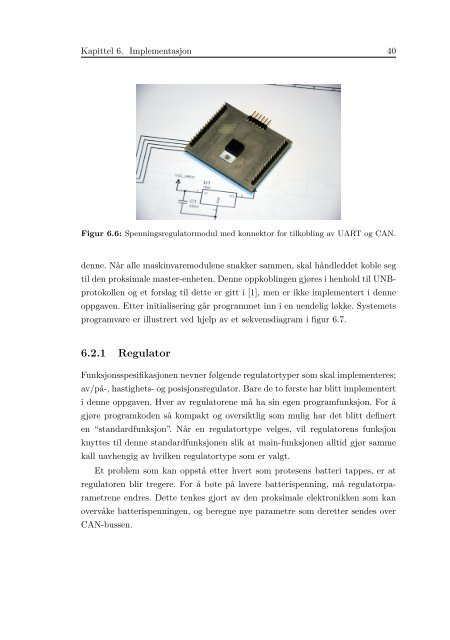
Figur 6.6: Spenningsregulatormodul med konnektor <strong>for</strong> tilkobling av UART og CAN.<br />
denne. Når alle maskinvaremodulene snakker sammen, skal håndleddet koble seg<br />
til den proksimale master-enheten. Denne oppkoblingen gjøres i henhold til UNB-<br />
protokollen og et <strong>for</strong>slag til dette er gitt i [1], men er ikke implementert i denne<br />
oppgaven. Etter initialisering går programmet inn i en uendelig løkke. Systemets<br />
programvare er illustrert ved hjelp av et sekvensdiagram i figur 6.7.<br />
6.2.1 Regulator<br />
Funksjonsspesifikasjonen nevner følgende regulatortyper som skal implementeres;<br />
av/på-, hastighets- og posisjonsregulator. Bare de to første har blitt implementert<br />
i denne oppgaven. Hver av regulatorene må ha sin egen programfunksjon. For å<br />
gjøre programkoden så kompakt og oversiktlig som mulig har det blitt definert<br />
en “standardfunksjon”. Når en regulatortype velges, vil regulatorens funksjon<br />
knyttes til denne standardfunksjonen slik at main-funksjonen alltid gjør samme<br />
kall uavhengig av hvilken regulatortype som er valgt.<br />
Et problem som kan oppstå etter hvert som protesens batteri tappes, er at<br />
regulatoren blir tregere. For å bøte på lavere batterispenning, må regulatorpa-<br />
rametrene endres. Dette tenkes gjort av den proksimale elektronikken som kan<br />
overvåke batterispenningen, og beregne nye parametre som deretter sendes over<br />
CAN-bussen.













