

Styresystem for kybernetisk håndleddsprotese - NTNU
Styresystem for kybernetisk håndleddsprotese - NTNU
Styresystem for kybernetisk håndleddsprotese - NTNU

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Kapittel 6. Implementasjon 37<br />
6.1.2 Motordriver- og CAN-modul<br />
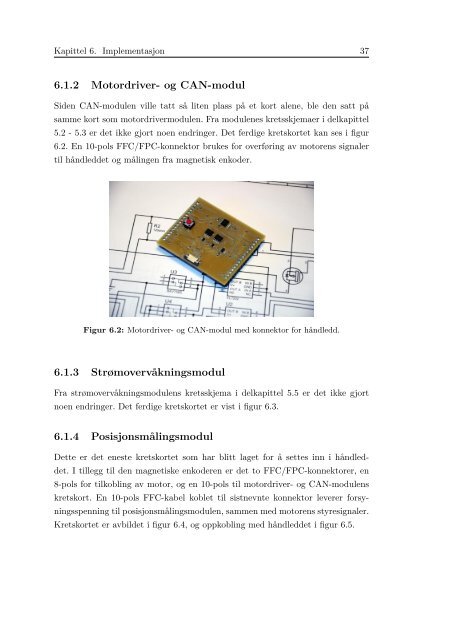
Siden CAN-modulen ville tatt så liten plass på et kort alene, ble den satt på<br />
samme kort som motordrivermodulen. Fra modulenes kretsskjemaer i delkapittel<br />
5.2 - 5.3 er det ikke gjort noen endringer. Det ferdige kretskortet kan ses i figur<br />
6.2. En 10-pols FFC/FPC-konnektor brukes <strong>for</strong> overføring av motorens signaler<br />
til håndleddet og målingen fra magnetisk enkoder.<br />
Figur 6.2: Motordriver- og CAN-modul med konnektor <strong>for</strong> håndledd.<br />
6.1.3 Strømovervåkningsmodul<br />
Fra strømovervåkningsmodulens kretsskjema i delkapittel 5.5 er det ikke gjort<br />
noen endringer. Det ferdige kretskortet er vist i figur 6.3.<br />
6.1.4 Posisjonsmålingsmodul<br />
Dette er det eneste kretskortet som har blitt laget <strong>for</strong> å settes inn i håndled-<br />
det. I tillegg til den magnetiske enkoderen er det to FFC/FPC-konnektorer, en<br />
8-pols <strong>for</strong> tilkobling av motor, og en 10-pols til motordriver- og CAN-modulens<br />
kretskort. En 10-pols FFC-kabel koblet til sistnevnte konnektor leverer <strong>for</strong>sy-<br />
ningsspenning til posisjonsmålingsmodulen, sammen med motorens styresignaler.<br />
Kretskortet er avbildet i figur 6.4, og oppkobling med håndleddet i figur 6.5.













