

Styresystem for kybernetisk håndleddsprotese - NTNU
Styresystem for kybernetisk håndleddsprotese - NTNU
Styresystem for kybernetisk håndleddsprotese - NTNU
SHOW LESS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Kapittel 6. Implementasjon 45<br />
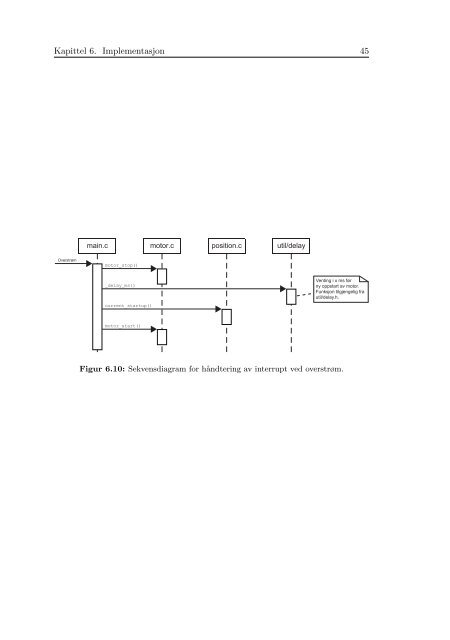
Overstrøm<br />
main.c motor.c position.c<br />
motor_stop()<br />
_delay_ms()<br />
current_startup()<br />
motor_start()<br />
util/delay<br />
Venting i x ms før<br />
ny oppstart av motor.<br />
Funksjon tilgjengelig fra<br />
util/delay.h.<br />
Figur 6.10: Sekvensdiagram <strong>for</strong> håndtering av interrupt ved overstrøm.













