

Styresystem for kybernetisk håndleddsprotese - NTNU
Styresystem for kybernetisk håndleddsprotese - NTNU
Styresystem for kybernetisk håndleddsprotese - NTNU

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Kapittel 5. Moduldesign 27<br />
Hall C<br />
Hall A<br />
Hall B<br />
8<br />
7<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
J1<br />
MOTOR<br />
VCC<br />
U3<br />
1<br />
2<br />
3<br />
BAV756S<br />
U4<br />
1<br />
2<br />
3<br />
BAV756S<br />
6<br />
5<br />
4<br />
6<br />
5<br />
4<br />
VCC_UREG<br />
5<br />
6<br />
7<br />
8<br />
U1<br />
OUT B IN B<br />
V+ GND<br />
OUT A IN A<br />
NC NC<br />
4<br />
3<br />
2<br />
1<br />
EL7202<br />
5<br />
6<br />
7<br />
8<br />
U2<br />
OUT B IN B<br />
V+ GND<br />
OUT A IN A<br />
NC NC<br />
4<br />
3<br />
2<br />
1<br />
EL7202<br />
Motorstrøm<br />
Motorfase A<br />
Motorfase B<br />
Motorfase C<br />
4<br />
VCC_UREG<br />
2 3 6<br />
5<br />
R1<br />
100Kohm<br />
U5<br />
1<br />
Transistor Av/På<br />
FDC6333C<br />
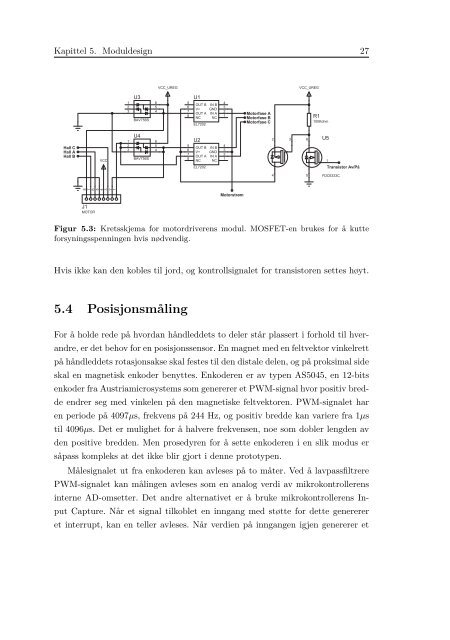
Figur 5.3: Kretsskjema <strong>for</strong> motordriverens modul. MOSFET-en brukes <strong>for</strong> å kutte<br />
<strong>for</strong>syningsspenningen hvis nødvendig.<br />
Hvis ikke kan den kobles til jord, og kontrollsignalet <strong>for</strong> transistoren settes høyt.<br />
5.4 Posisjonsmåling<br />
For å holde rede på hvordan håndleddets to deler står plassert i <strong>for</strong>hold til hver-<br />
andre, er det behov <strong>for</strong> en posisjonssensor. En magnet med en feltvektor vinkelrett<br />
på håndleddets rotasjonsakse skal festes til den distale delen, og på proksimal side<br />
skal en magnetisk enkoder benyttes. Enkoderen er av typen AS5045, en 12-bits<br />
enkoder fra Austriamicrosystems som genererer et PWM-signal hvor positiv bred-<br />
de endrer seg med vinkelen på den magnetiske feltvektoren. PWM-signalet har<br />
en periode på 4097µs, frekvens på 244 Hz, og positiv bredde kan variere fra 1µs<br />
til 4096µs. Det er mulighet <strong>for</strong> å halvere frekvensen, noe som dobler lengden av<br />
den positive bredden. Men prosedyren <strong>for</strong> å sette enkoderen i en slik modus er<br />
såpass kompleks at det ikke blir gjort i denne prototypen.<br />
Målesignalet ut fra enkoderen kan avleses på to måter. Ved å lavpassfiltrere<br />
PWM-signalet kan målingen avleses som en analog verdi av mikrokontrollerens<br />
interne AD-omsetter. Det andre alternativet er å bruke mikrokontrollerens In-<br />
put Capture. Når et signal tilkoblet en inngang med støtte <strong>for</strong> dette genererer<br />
et interrupt, kan en teller avleses. Når verdien på inngangen igjen genererer et













