

Styresystem for kybernetisk håndleddsprotese - NTNU
Styresystem for kybernetisk håndleddsprotese - NTNU
Styresystem for kybernetisk håndleddsprotese - NTNU

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Kapittel 5. Moduldesign 34<br />
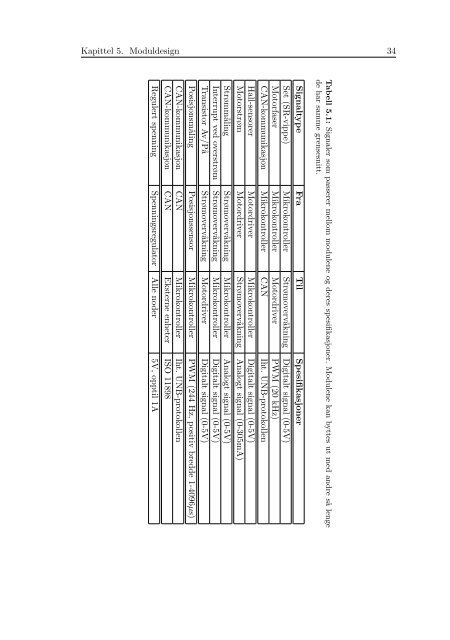
Signaltype Fra Til Spesifikasjoner<br />
Set (SR-vippe) Mikrokontroller Strømovervåkning Digitalt signal (0-5V)<br />
Motorfaser Mikrokontroller Motordriver PWM (20 kHz)<br />
CAN-kommunikasjon Mikrokontroller CAN Iht. UNB-protokollen<br />
Hall-sensorer Motordriver Mikrokontroller Digitalt signal (0-5V)<br />
Motorstrøm Motordriver Strømovervåkning Analogt signal (0-305mA)<br />
Strømmåling Strømovervåkning Mikrokontroller Analogt signal (0-5V)<br />
Interrupt ved overstrøm Strømovervåkning Mikrokontroller Digitalt signal (0-5V)<br />
Transistor Av/På Strømovervåkning Motordriver Digitalt signal (0-5V)<br />
Posisjonsmåling Posisjonssensor Mikrokontroller PWM (244 Hz, positiv bredde 1-4096µs)<br />
CAN-kommunikasjon CAN Mikrokontroller Iht. UNB-protokollen<br />
CAN-kommunikasjon CAN Eksterne enheter ISO 11898<br />
Regulert spenning Spenningsregulator Alle noder 5V, opptil 1A<br />
Tabell 5.1: Signaler som passerer mellom modulene og deres spesifikasjoner. Modulene kan byttes ut med andre så lenge<br />
de har samme grensesnitt.













