

Styresystem for kybernetisk håndleddsprotese - NTNU
Styresystem for kybernetisk håndleddsprotese - NTNU
Styresystem for kybernetisk håndleddsprotese - NTNU

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Kapittel 6. Implementasjon 36<br />
Tabell 6.1: Oversikt over hvilke signaler som går på kretskortenes konnektor J1 og J2<br />
(iht. kretsskjemaene i vedlegg B).<br />
J2 Signaltype<br />
1 VCC (5V)<br />
2 GND<br />
3 Motorstrøm<br />
4 Strømmåling<br />
5 CAN Low<br />
6 CAN High<br />
7 UART RX<br />
8 UART TX<br />
9<br />
10 Hall C/INT4<br />
11 Hall A/INT5<br />
12 Hall B/INT6<br />
13 Reset<br />
14 Posisjonsmåling/ICP3<br />
15 VCC (5V)<br />
16 GND<br />
J1 Signaltype<br />
1 VCC_UREG (5-18V)<br />
2 VCC (5V)<br />
3 CAN RX<br />
4 CAN TX<br />
5 Transistor Av/På<br />
6 Set (SR-vippe)<br />
7 Reset (SR-vippe)<br />
8 Motorfase A/OC1C<br />
9 Motorfase B/OC1B<br />
10 Motorfase C/OC1A<br />
11<br />
12<br />
13<br />
14<br />
15 VCC (5V)<br />
16 GND<br />
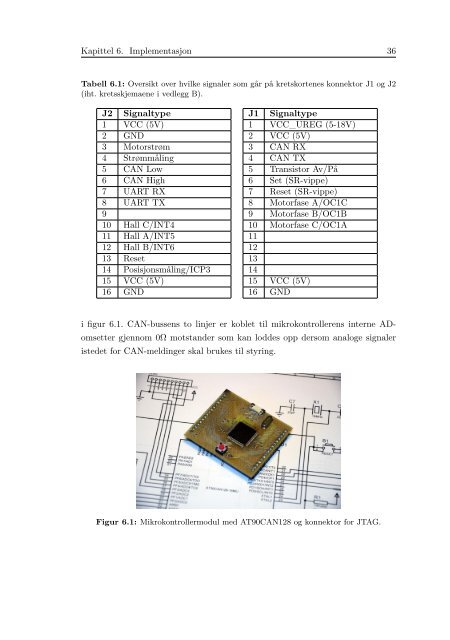
i figur 6.1. CAN-bussens to linjer er koblet til mikrokontrollerens interne AD-<br />
omsetter gjennom 0Ω motstander som kan loddes opp dersom analoge signaler<br />
istedet <strong>for</strong> CAN-meldinger skal brukes til styring.<br />
Figur 6.1: Mikrokontrollermodul med AT90CAN128 og konnektor <strong>for</strong> JTAG.













