

Styresystem for kybernetisk håndleddsprotese - NTNU
Styresystem for kybernetisk håndleddsprotese - NTNU
Styresystem for kybernetisk håndleddsprotese - NTNU
SHOW LESS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Kapittel 4. Spesifisering og toppnivå-design 21<br />
Mikrokontroller<br />
main.c<br />
controller.c<br />
1. 2. 3. 4. 5.<br />
can.c current.c motor.c position.c uart.c<br />
6.<br />
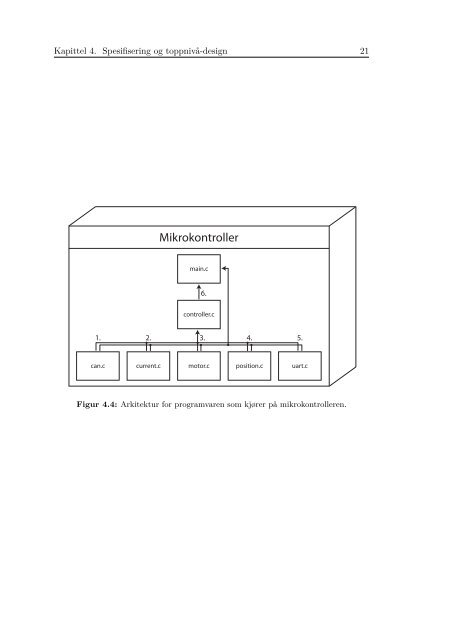
Figur 4.4: Arkitektur <strong>for</strong> programvaren som kjører på mikrokontrolleren.













