(SILAS) für die minimal invasive Chirurgie - Universität zu Lübeck
(SILAS) für die minimal invasive Chirurgie - Universität zu Lübeck
(SILAS) für die minimal invasive Chirurgie - Universität zu Lübeck

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
ergänzt wurden. Interessant sind <strong>zu</strong>m Beispiel Angaben<br />
<strong>zu</strong>m Ort oder <strong>zu</strong>r Zeit der Messung. Wie aber<br />
soll ein Sensorknoten wissen, wo er sich befindet?<br />
Diese und andere Fragestellungen beschäftigen Wissenschaftler<br />
seit Jahren. Das Institut <strong>für</strong> Telematik der <strong>Universität</strong><br />
<strong>Lübeck</strong> hat in mehreren Forschungsprojekten,<br />
<strong>die</strong> alle aus Drittmitteln finanziert werden, unterschiedlichste<br />
Problemstellungen in Sensornetzwerken untersucht.<br />
Dabei wird in den aktuell laufenden Projekten<br />
eine große Bandbreite zwischen Grundlagenforschung<br />
und praktischer Umset<strong>zu</strong>ng abgedeckt. Im Folgenden<br />
werden <strong>die</strong> vier wichtigsten aktuellen Projekte kurz<br />
vorgestellt.<br />
SwarmNet. In <strong>die</strong>sem DFG-geförderten Projekt geht es<br />
vor allem um Algorithmen in sehr großen Sensornetzen,<br />
bestehend aus möglicherweise mehreren tausend Knoten.<br />
Typischerweise sind <strong>die</strong>se Knoten sehr klein und<br />
erbringen nur <strong>die</strong> nötigsten Funktionen <strong>zu</strong>m Erfassen<br />
und Weiterleiten von Umweltdaten. Insbesondere besitzen<br />
sie keine Hardware <strong>zu</strong>r Lokalisierung (z.B. GPS).<br />
In solchen Netzen ist es jedoch z.B. <strong>zu</strong>r Optimierung<br />
des Energieverbrauchs notwendig <strong>zu</strong> wissen, welche<br />
Knoten sich in welchen Bereichen des Netzes aufhalten<br />
und damit bestimmte Funktionen wie etwa <strong>die</strong> Weiterleitung<br />
der Sensordaten von anderen Knoten übernehmen<br />
können. In SwarmNet werden deshalb lokal arbeitende<br />
Algorithmen und Protokolle entwickelt, mit denen<br />
sich <strong>die</strong> Topologie eines Netzes bestimmen lässt, ohne<br />
auf GPS-Daten angewiesen <strong>zu</strong> sein [1,2,3]. Lokalität<br />
ist wichtig, da nicht <strong>zu</strong> viel kommuniziert werden darf<br />
– Kommunikation kostet sehr viel mehr Energie als lokale<br />
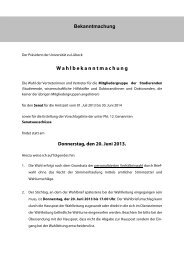
Berechnungen. Abbildung 2 zeigt den Prozess der<br />
Bestimmung der Grenzen eines solchen Netzes. Ist der<br />
Algorithmus abgeschlossen, kennt jeder Knoten seine<br />
Rolle im Netzwerk; außerdem kann lokal entschieden<br />
werden, wer eine Rolle übernehmen kann, wenn etwa<br />
ein Knoten ausfällt.<br />
Abb. 2: Schrittweiser Topologieaufbau bei SwarmNet<br />
Die Arbeiten basieren auf einem speziellen Sensornetz-<br />
Simulator, der am Institut entwickelt wurde [4]. Durch<br />
seinen hohen Abstraktionsgrad erlaubt <strong>die</strong>ser Simulator<br />
<strong>die</strong> Verarbeitung sehr großer Netze. Weitere Informationen<br />
finden sich unter www.swarmnet.de.<br />
SWARMS. Schon deutlich mehr in <strong>die</strong> praktische Richtung<br />
geht <strong>die</strong>ses ebenfalls von der DFG geförderte Projekt.<br />
Es befasst sich vor allem mit der Programmierung<br />
von Anwendungen in Sensornetzen. Im Vordergrund<br />
steht dabei <strong>die</strong> Problematik, möglicherweise viele tausende<br />
von Knoten mit der entsprechenden Betriebs- und<br />
Anwendungssoftware aus<strong>zu</strong>statten und <strong>die</strong>se vielen<br />
Knoten dann während des Netzbetriebs <strong>zu</strong> koordinieren.<br />
Der Ansatz in <strong>die</strong>sem Projekt besteht darin, eine<br />
solche Menge an Knoten als einen „Schwarm“ auf<strong>zu</strong>fassen.<br />
Dies hat sofort Auswirkungen auf <strong>die</strong> Programmierung:<br />
es wird nicht mehr das Verhalten von Einzelknoten<br />
programmiert, sondern das des Schwarms.<br />
Das Herunterbrechen auf <strong>die</strong> Einzelknoten übernimmt<br />
dann <strong>die</strong> so genannte Swarms Middleware [5], so dass<br />
der Anwendungsprogrammierer sich wirklich rein auf<br />
<strong>die</strong> Probleme der Anwendung konzentrieren kann und<br />
sich nicht mit Mobilität und Komplexität der einzelnen<br />
Knoten befassen muss. Ein durchgängiger Softwareentwicklungsprozess<br />
bringt schließlich automatisiert <strong>die</strong><br />
Softwarekomponenten auf <strong>die</strong> Einzelsysteme.<br />
Für <strong>die</strong> Koordination der Knoten und z.B. auch <strong>die</strong> Fusion<br />
der anfallenden Sensordaten ist ein einheitliches<br />
Zeitverständnis der Knoten von großer Bedeutung<br />
– aber gar nicht so leicht her<strong>zu</strong>stellen, da <strong>die</strong> Uhren in<br />
den Sensorknoten meist eher ungenau gehen und damit<br />
schnell auseinander laufen. In SWARMS werden deshalb<br />
verschiedene Algorithmen <strong>zu</strong>r Uhrensynchronisation<br />
untersucht und weiterentwickelt [6].<br />
Ein ebenfalls wichtiges Problem ist <strong>die</strong> Visualisierung<br />
von Sensordaten. Dies kann wegen der geringen Ressourcen<br />
eines Knotens nicht vor Ort geschehen – Sensorknoten<br />
besitzen keine Bildschirme. Entsprechend<br />
müssen Werkzeuge entwickelt werden, mit denen der<br />
Zustand eines Sensornetzes visualisiert werden kann.<br />
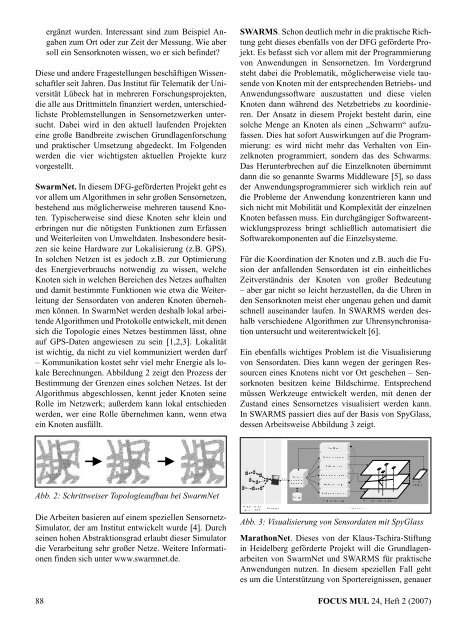
In SWARMS passiert <strong>die</strong>s auf der Basis von SpyGlass,<br />
dessen Arbeitsweise Abbildung 3 zeigt.<br />
Abb. 3: Visualisierung von Sensordaten mit SpyGlass<br />
MarathonNet. Dieses von der Klaus-Tschira-Stiftung<br />
in Heidelberg geförderte Projekt will <strong>die</strong> Grundlagenarbeiten<br />
von SwarmNet und SWARMS <strong>für</strong> praktische<br />
Anwendungen nutzen. In <strong>die</strong>sem speziellen Fall geht<br />
es um <strong>die</strong> Unterstüt<strong>zu</strong>ng von Sportereignissen, genauer<br />
88 FOCUS MUL 24, Heft 2 (2007)