

antriebstechnik 6/2017
antriebstechnik 6/2017
antriebstechnik 6/2017
- TAGS
- antriebstechnik

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
1<br />
01<br />
T-Ersatzschaltbild des Linearmotors<br />
02<br />
Vergleich des konventionellen und linearangetriebenen<br />
Bandfördersystems<br />
Vergleich des konventionellen und linearangetriebenen Bandfördersystems<br />
F Tischauflage F 2<br />
F 1<br />
U 1<br />
I 1<br />
U i<br />
Umlenktrommel<br />
Antriebstrommel<br />
F Tischauflage F 2<br />
F 1<br />
Umlenktrommel<br />
Linearmotor<br />
T-Ersatzschaltbild des Linearmotors<br />
R 1<br />
jX 1σ<br />
jX‘ 2σ<br />
R‘ 2<br />
/s<br />
jX 1h<br />
a)<br />
b)<br />
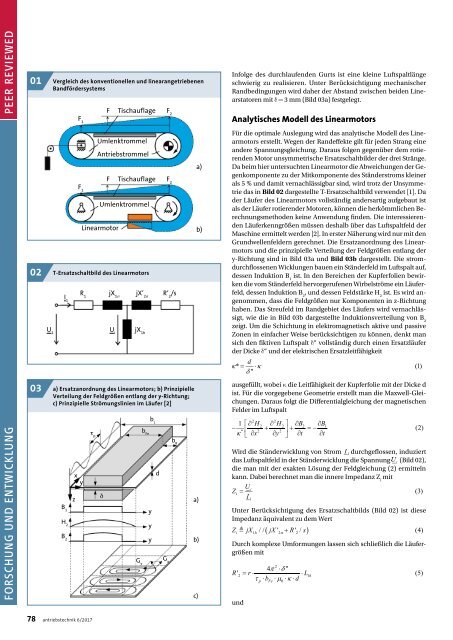
Infolge des durchlaufenden Gurts ist eine kleine Luftspaltlänge<br />
schwierig zu realisieren. Unter Berücksichtigung mechanischer<br />
Randbedingungen wird daher der Abstand zwischen beiden Linearstatoren<br />
mit δ = 3 mm (Bild 03a) festgelegt.<br />
Analytisches Modell des Linearmotors<br />
Für die optimale Auslegung wird das analytische Modell des Linearmotors<br />
erstellt. Wegen der Randeffekte gilt für jeden Strang eine<br />
andere Spannungsgleichung. Daraus folgen gegenüber dem rotierenden<br />
Motor unsymmetrische Ersatzschaltbilder der drei Stränge.<br />
Da beim hier untersuchten Linearmotor die Abweichungen der Gegenkomponente<br />
zu der Mitkomponente des Ständerstroms kleiner<br />
als 5 % und damit vernachlässigbar sind, wird trotz der Unsymmetrie<br />
das in Bild 02 dargestellte T-Ersatzschaltbild verwendet [1]. Da<br />
der Läufer des Linearmotors vollständig andersartig aufgebaut ist<br />
als der Läufer rotierender Motoren, können die herkömmlichen Berechnungsmethoden<br />
keine Anwendung finden. Die interessierenden<br />
Läuferkenngrößen müssen deshalb über das Luftspaltfeld der<br />
Maschine ermittelt werden [2]. In erster Näherung wird nur mit den<br />
Grundwellenfeldern gerechnet. Die Ersatzanordnung des Linearmotors<br />
und die prinzipielle Verteilung der Feldgrößen entlang der<br />
y-Richtung sind in Bild 03a und Bild 03b dargestellt. Die stromdurchflossenen<br />
Wicklungen bauen ein Ständerfeld im Luftspalt auf,<br />
dessen Induktion B 1<br />
ist. In den Bereichen der Kupferfolien bewirken<br />
die vom Ständerfeld hervorgerufenen Wirbelströme ein Läuferfeld,<br />
dessen Induktion B 2<br />
, und dessen Feldstärke H 2<br />
ist. Es wird angenommen,<br />
dass die Feldgrößen nur Komponenten in z-Richtung<br />
haben. Das Streufeld im Randgebiet des Läufers wird vernachlässigt,<br />
wie die in Bild 03b dargestellte Induktionsverteilung von B 2<br />
zeigt. Um die Schichtung in elektromagnetisch aktive und passive<br />
Zonen in einfacher Weise berücksichtigen zu können, denkt man<br />
sich den fiktiven Luftspalt δ‘‘ vollständig durch einen Ersatzläufer<br />
der Dicke δ‘‘ und der elektrischen Ersatzleitfähigkeit<br />
03<br />
03<br />
a) Ersatzanordnung des Linearmotors; b) Prinzipielle<br />
Verteilung der Feldgrößen entlang der y-Richtung;<br />
c) Prinzipielle Strömungslinien im Läufer [2]<br />
a) Ersatzanordnung des Linearmotors b) Prinzipielle Verteilung der Feldgrößen<br />
entlang der y-Richtung c) Prinzipielle Strömungslinien im Läufer [2]<br />
ausgefüllt, wobei κ die Leitfähigkeit der Kupferfolie mit der Dicke d<br />
ist. Für die vorgegebene Geometrie erstellt man die Maxwell-Gleichungen.<br />
Daraus folgt die Differentialgleichung der magnetischen<br />
Felder im Luftspalt<br />
b L<br />
τ p<br />
b Fe<br />
b R<br />
x<br />
y<br />
d<br />
Wird die Ständerwicklung von Strom durchgeflossen, induziert<br />
das Luftspaltfeld in der Ständerwicklung die Spannung (Bild 02),<br />
die man mit der exakten Lösung der Feldgleichung (2) ermitteln<br />
kann. Dabei berechnet man die innere Impedanz Z i<br />
mit<br />
B 1<br />
H 2<br />
z<br />
δ<br />
y<br />
y<br />
a)<br />
Unter Berücksichtigung des Ersatzschaltbilds (Bild 02) ist diese<br />
Impedanz äquivalent zu dem Wert<br />
B 2 y<br />
G G x<br />
y<br />
b)<br />
Durch komplexe Umformungen lassen sich schließlich die Läufergrößen<br />
mit<br />
c)<br />
und<br />
78 <strong>antriebstechnik</strong> 6/<strong>2017</strong>














