0 - FTP Directory Listing - Nato
0 - FTP Directory Listing - Nato
0 - FTP Directory Listing - Nato

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
-U<br />
I 1<br />
b I l l<br />
. . . .<br />
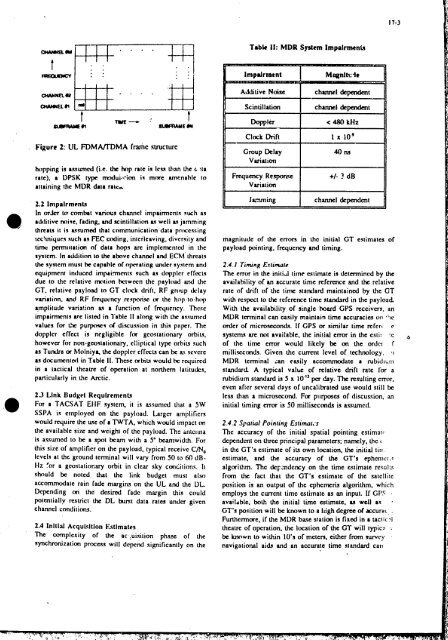
, Figure 2: UL FDMNTDMA f hc sln~clurc<br />
: :I<br />
: :i<br />
hopping is a.9sumed (i.e. he hop rate is lest Oian be G *.U<br />
rate). a DPSK rype dui.4on it rnwe amcnahlc to<br />
attaining the MDR data rata<br />
2.2 lmpalrmrnb<br />
In or& tn combat various channel impairments Such as<br />
athlitivc miw, fading. and scintillation LI well L% jamming<br />
hreau it is atsum4 that communication data pnrcssing<br />
tcchniqurs such as FEc ding. interleaving. divcrsiiy a d<br />
tim permutation of data hops arc implemcnicd in thc<br />
systcm. In acidition to thc above channcl and EChl' thrcats<br />
drc system must bc crpahlc of operating unclcr system and<br />
equipment iniluccd imprimcnts such as dopplcr cffctir<br />
due IO be relative motion bctwcc.cn the payload aod thc<br />
GT. rrlative payload to GT clock drift. RF pup &lay<br />
variatim. and RF frrqucncy respo~sc m the hnp-to-hclp<br />
rmplitudc varia!ion at a func:ion of frcqilrncy. rhcse<br />
impaimenla arc listd in Table II along with thr assurncd<br />
valucs for t.k pu'p~ct d discusqion in this pnper. The<br />
dopplcr effect is ncgligibte for geostationary orbiiq.<br />
however for non-geostationary. elliptical type orbits such<br />
as Tundra or Molniya. the dopplcr cffccm can bc ax scvcrc<br />
as documentnl in Toble 11. These wbi~r would he rquircd<br />
in a tactical theatre of operation ai northern latitudes.<br />
pmicularly in the Arctic.<br />
2.3 Llnk Budget Requlrernenb<br />
For a TACSAT EtlF system. it is awumal that a 5W<br />
SSPA is crnploycd on the payload. Largcr amplifiers<br />
would rcquirc the uw of a TWTA. which wwld irnpsct (RI<br />
the available si72 and wcight of thc payload. Thz antciina<br />
is asumcd to be a spot beam with a 5" bcaniwidth. For<br />
this size of amplifier on the payload, typical rcccivc C/N,<br />
lcvels at h c ground terminal will vary from 50 to 60 dB-<br />
k{z 'or a gWSlaliOEary orbit in clcar sky conlirions. It<br />
should bc noted that thc link budget must also<br />
accommodate rain fade margins on the UL and the UL.<br />
Depending on the desird fadc margin this could<br />
potatiallv restrict Ihe DL burst data rata unda given<br />
channct conditims.<br />
2.4 Inltlal Acqulsltlon Estlrnates<br />
The complexity of the ac.,uisition phaw of the<br />
synchronization proccw will dcpcnd significantly on the<br />
J<br />
Tabk 11: MDR System Impalrmenb<br />
Group Delay<br />
Variation<br />
Fnqumy Rcsponw<br />
Variation<br />
+I- ? dB<br />
laming I channel dcpendcni<br />
magnitude of the crrm in thc initial GT estimates of<br />
payload pointing. frcqucncy UKI timing.<br />
17-3<br />
2.4.1 Timinu Eshwtc<br />
The error in the initid time estimate is detmnincd by the<br />
availability of M accurate time mfemcc and the relative<br />
rate of drift of the time standard maintained by the GT<br />
with rc.spcct to Ihc reference time rtandzrd in the payload<br />
With the availability of single bard GPS rcccivcrs. an<br />
MDR tcnninal CM easily maintain time accuracies 017 "IC<br />
ordcr of microstcondq. If GPS or similar time rcfcrc c<br />
systcm.9 M MI available. the initial error in the cstii :e<br />
of the timc enor would likcly be on the ordcr f<br />
milliseconds. Givcn the current level of technology. '1<br />
MDR terminal ;an catily accommodate a rubidiL:ii<br />
standard. A typical vallrc of rclative drift rate for a<br />
rubidium standard is 5 x IO'* per day. Thc resulting cmr.<br />
evcn aftcr several drys of uncalibrated usc would still be<br />
less than a miaosccond. For pitrposcs of discussion, an<br />
initial hing mor is 50 millisccmds is asumcd.<br />
2.4.2 Spatial Pointing Esfimai:s<br />
Thc accuracy of the initial spatial pointing cstimall<br />
dcpcndcnt on three principal parameters; namcly, thc t<br />
in the GT's estimate of its own location. he initial tin<br />
estimate, and the accuracy of the GT's ephcn1cr.C<br />
algorithm. Thc dc~~ndcncy on the time estimate rcwlu<br />
from he fact that the GT's estimate of the satcllirc<br />
position is an outpul of thc cphcmeris algorithm. which<br />
employs !he currcn~ timc estimate as an input. If GPS<br />
avai!dbk. boUi the initial timc estimate, U well as .<br />
GT's position will be known to a high dcpe d accuruc .<br />
Furchcrmore. if the MDR bau station is fixed in a tactic-I<br />
theatre of operation. thc location of the CT will typicn .<br />
be h w n<br />
to within 10's of mclers, either from w r y<br />
navigational aids and an accurate time standard can