

KR QUANTEC extra - KUKA Robotics
KR QUANTEC extra - KUKA Robotics
KR QUANTEC extra - KUKA Robotics

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
6.2 Machine frame mounting<br />
Issued: 29.11.2012 Version: Spez <strong>KR</strong> <strong>QUANTEC</strong> <strong>extra</strong> V4 en (PDF)<br />
6 Planning<br />
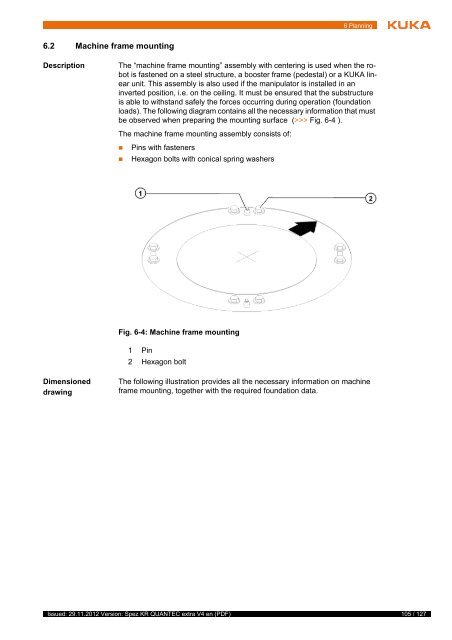
Description The “machine frame mounting” assembly with centering is used when the robot<br />
is fastened on a steel structure, a booster frame (pedestal) or a <strong>KUKA</strong> linear<br />
unit. This assembly is also used if the manipulator is installed in an<br />
inverted position, i.e. on the ceiling. It must be ensured that the substructure<br />
is able to withstand safely the forces occurring during operation (foundation<br />
loads). The following diagram contains all the necessary information that must<br />
be observed when preparing the mounting surface (>>> Fig. 6-4 ).<br />
The machine frame mounting assembly consists of:<br />
Pins with fasteners<br />
Hexagon bolts with conical spring washers<br />
Dimensioned<br />
drawing<br />
Fig. 6-4: Machine frame mounting<br />
1 Pin<br />
2 Hexagon bolt<br />
The following illustration provides all the necessary information on machine<br />
frame mounting, together with the required foundation data.<br />
105 / 127














