

KR QUANTEC extra - KUKA Robotics
KR QUANTEC extra - KUKA Robotics
KR QUANTEC extra - KUKA Robotics

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
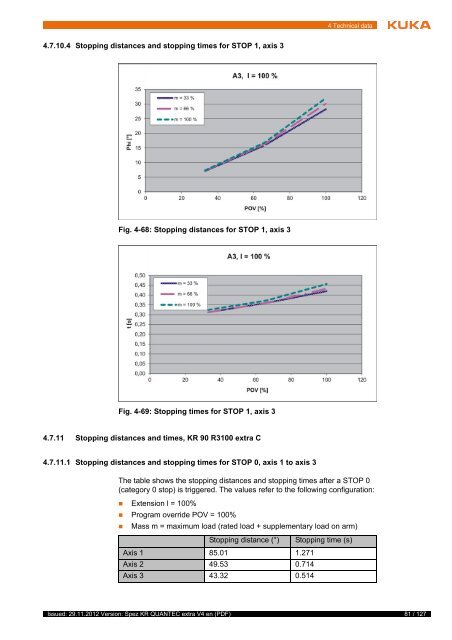
4.7.10.4 Stopping distances and stopping times for STOP 1, axis 3<br />
Fig. 4-68: Stopping distances for STOP 1, axis 3<br />
Fig. 4-69: Stopping times for STOP 1, axis 3<br />
4.7.11 Stopping distances and times, <strong>KR</strong> 90 R3100 <strong>extra</strong> C<br />
4.7.11.1 Stopping distances and stopping times for STOP 0, axis 1 to axis 3<br />
Issued: 29.11.2012 Version: Spez <strong>KR</strong> <strong>QUANTEC</strong> <strong>extra</strong> V4 en (PDF)<br />
4 Technical data<br />
The table shows the stopping distances and stopping times after a STOP 0<br />
(category 0 stop) is triggered. The values refer to the following configuration:<br />
Extension l = 100%<br />
Program override POV = 100%<br />
Mass m = maximum load (rated load + supplementary load on arm)<br />
Stopping distance (°) Stopping time (s)<br />
Axis 1 85.01 1.271<br />
Axis 2 49.53 0.714<br />
Axis 3 43.32 0.514<br />
81 / 127














