

KR QUANTEC extra - KUKA Robotics
KR QUANTEC extra - KUKA Robotics
KR QUANTEC extra - KUKA Robotics

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
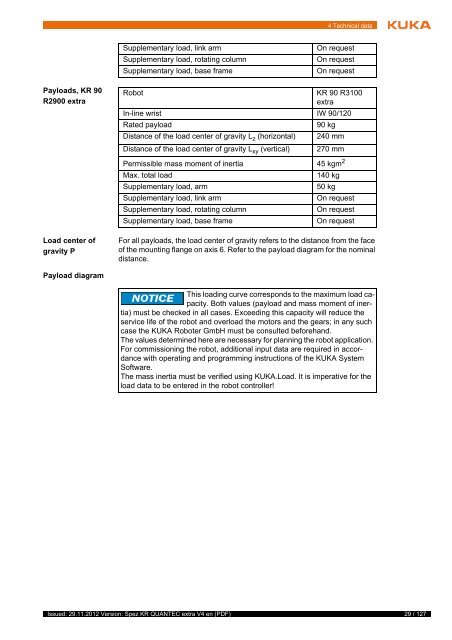
Payloads, <strong>KR</strong> 90<br />
R2900 <strong>extra</strong><br />
Load center of<br />
gravity P<br />
Payload diagram<br />
Issued: 29.11.2012 Version: Spez <strong>KR</strong> <strong>QUANTEC</strong> <strong>extra</strong> V4 en (PDF)<br />
4 Technical data<br />
Supplementary load, link arm On request<br />
Supplementary load, rotating column On request<br />
Supplementary load, base frame On request<br />
Robot <strong>KR</strong> 90 R3100<br />
<strong>extra</strong><br />
In-line wrist IW 90/120<br />
Rated payload 90 kg<br />
Distance of the load center of gravity Lz (horizontal) 240 mm<br />
Distance of the load center of gravity Lxy (vertical) 270 mm<br />
Permissible mass moment of inertia 45 kgm2 Max. total load 140 kg<br />
Supplementary load, arm 50 kg<br />
Supplementary load, link arm On request<br />
Supplementary load, rotating column On request<br />
Supplementary load, base frame On request<br />
For all payloads, the load center of gravity refers to the distance from the face<br />
of the mounting flange on axis 6. Refer to the payload diagram for the nominal<br />
distance.<br />
This loading curve corresponds to the maximum load capacity.<br />
Both values (payload and mass moment of inertia)<br />
must be checked in all cases. Exceeding this capacity will reduce the<br />
service life of the robot and overload the motors and the gears; in any such<br />
case the <strong>KUKA</strong> Roboter GmbH must be consulted beforehand.<br />
The values determined here are necessary for planning the robot application.<br />
For commissioning the robot, additional input data are required in accordance<br />
with operating and programming instructions of the <strong>KUKA</strong> System<br />
Software.<br />
The mass inertia must be verified using <strong>KUKA</strong>.Load. It is imperative for the<br />
load data to be entered in the robot controller!<br />
29 / 127














