

KR QUANTEC extra - KUKA Robotics
KR QUANTEC extra - KUKA Robotics
KR QUANTEC extra - KUKA Robotics

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
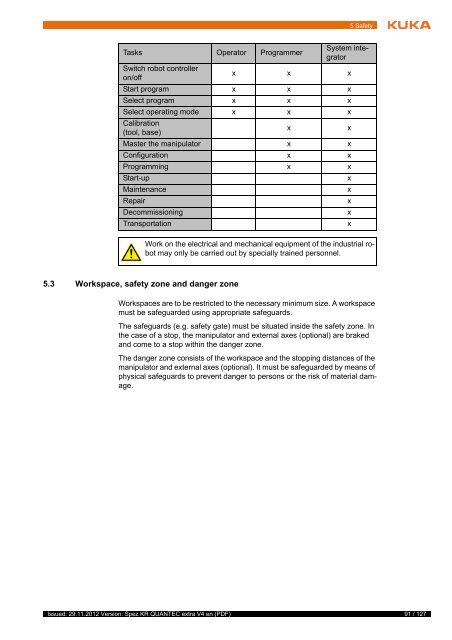
Tasks Operator Programmer<br />
Switch robot controller<br />
on/off<br />
5.3 Workspace, safety zone and danger zone<br />
Issued: 29.11.2012 Version: Spez <strong>KR</strong> <strong>QUANTEC</strong> <strong>extra</strong> V4 en (PDF)<br />
5 Safety<br />
System integrator<br />
x x x<br />
Start program x x x<br />
Select program x x x<br />
Select operating mode x x x<br />
Calibration<br />
(tool, base)<br />
x x<br />
Master the manipulator x x<br />
Configuration x x<br />
Programming x x<br />
Start-up x<br />
Maintenance x<br />
Repair x<br />
Decommissioning x<br />
Transportation x<br />
Work on the electrical and mechanical equipment of the industrial robot<br />
may only be carried out by specially trained personnel.<br />
Workspaces are to be restricted to the necessary minimum size. A workspace<br />
must be safeguarded using appropriate safeguards.<br />
The safeguards (e.g. safety gate) must be situated inside the safety zone. In<br />
the case of a stop, the manipulator and external axes (optional) are braked<br />
and come to a stop within the danger zone.<br />
The danger zone consists of the workspace and the stopping distances of the<br />
manipulator and external axes (optional). It must be safeguarded by means of<br />
physical safeguards to prevent danger to persons or the risk of material damage.<br />
91 / 127














