

Download RoboCylinder Servo RCS Controller ... - pulsar.com.tr
Download RoboCylinder Servo RCS Controller ... - pulsar.com.tr
Download RoboCylinder Servo RCS Controller ... - pulsar.com.tr

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<s<strong>tr</strong>ong>RCS</s<strong>tr</strong>ong><br />
<s<strong>tr</strong>ong>RCS</s<strong>tr</strong>ong> Series<br />
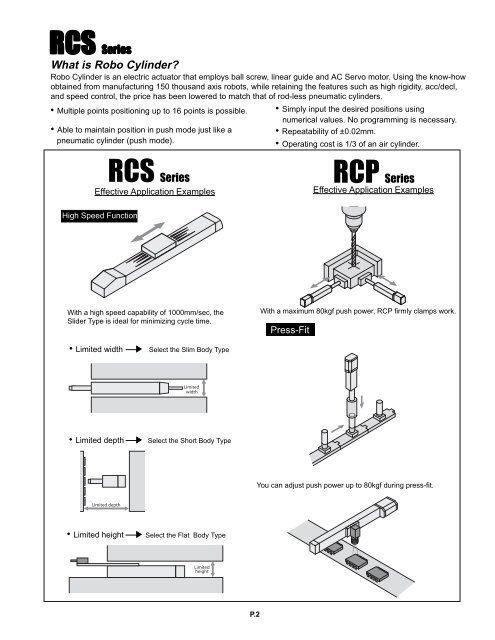
What is Robo Cylinder?<br />
Robo Cylinder is an elec<strong>tr</strong>ic actuator that employs ball screw, linear guide and AC <s<strong>tr</strong>ong>Servo</s<strong>tr</strong>ong> motor. Using the know-how<br />
obtained from manufacturing 150 thousand axis robots, while retaining the features such as high rigidity, acc/decl,<br />
and speed con<strong>tr</strong>ol, the price has been lowered to match that of rod-less pneumatic cylinders.<br />
• Multiple points positioning up to 16 points is possible.<br />
• Able to maintain position in push mode just like a<br />
pneumatic cylinder (push mode).<br />
• Simply input the desired positions using<br />
numerical values. No programming is necessary.<br />
• Repeatability of ±0.02mm.<br />
• Operating cost is 1/3 of an air cylinder.<br />
<s<strong>tr</strong>ong>RCS</s<strong>tr</strong>ong> Series<br />
Effective Application Examples<br />
RCP Series<br />
Effective Application Examples<br />
High Speed Function on<br />
Clamp<br />
With a high speed capability of 1000mm/sec, the<br />
Slider Type is ideal for minimizing cycle time.<br />
With a maximum 80kgf push power, RCP firmly clamps work.<br />
Press-Fit<br />
• Limited width<br />
Select the Slim Body Type<br />
Limited<br />
width<br />
• Limited depth<br />
Select the Short Body Type<br />
You can adjust push power up to 80kgf during press-fit.<br />
Limited depth<br />
• Limited height<br />
Select the Flat Body Type<br />
Limited<br />
height<br />
P.2













