Microcomputer Circuits and Processes
Microcomputer Circuits and Processes
Microcomputer Circuits and Processes

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
iased that way). This low, when fed back to the counter, tells it to stop<br />
counting. The counter now holds 0101, the binary value of the input<br />
voltage. The conversion is complete, <strong>and</strong> the 4-bit number can be<br />
enabled on to the computer's data bus <strong>and</strong> read into memory.<br />
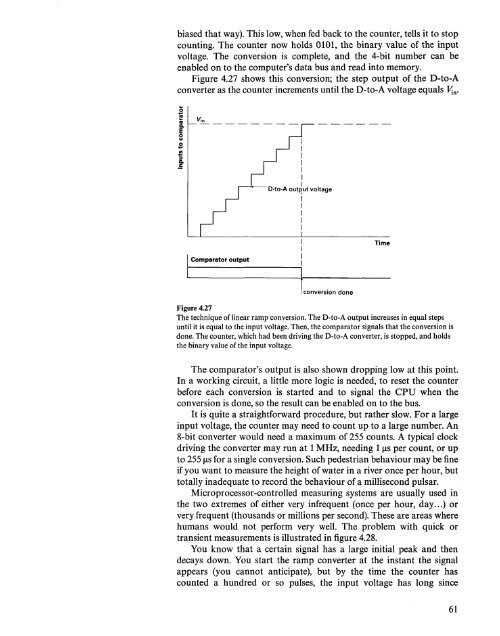
Figure 4.27 shows this conversion; the step output of the D-to-A<br />
converter as the counter increments until the D-to-A voltage equals Jlin'<br />
V iṉ<br />
-------<br />
I<br />
I<br />
I<br />
1<br />
I<br />
I<br />
I<br />
D-to-A output voltage<br />
I Comp ••• ",<br />
output<br />
Time<br />
I conversion<br />
done<br />
Figure 4.27<br />
The technique oflinear ramp conversion. The D-to-A output increases in equal steps<br />
until it is equal to the input voltage. Then, the comparator signals that the conversion is<br />
done. The counter, which had been driving the D-to-A converter, is stopped, <strong>and</strong> holds<br />
the binary value of the input voltage.<br />
The comparator's output is also shown dropping low at this point.<br />
In a working circuit, a little more logic is needed, to reset the counter<br />
before each conversion is started <strong>and</strong> to signal the CPU when the<br />
conversion is done, so the result can be enabled on to the bus.<br />
It is quite a straightforward procedure, but rather slow. For a large<br />
input voltage, the counter may need to count up to a large number. An<br />
8-bit converter would need a maximum of 255 counts. A typical clock<br />
driving the converter may run at 1MHz, needing 1 JlS per count, or up<br />
to 255 JlS for a single conversion. Such pedestrian behaviour may be fine<br />
if you want to measure the height of water in a river once per hour, but<br />
totally inadequate to record the behaviour of a millisecond pulsar.<br />
Microprocessor-controlled measuring systems are usually used in<br />
the two extremes of either very infrequent (once per hour, day ... ) or<br />
very frequent (thous<strong>and</strong>s or millions per second). These are areas where<br />
humans would not perform very well. The problem with quick or<br />
transient measurements is illustrated in figure 4.28.<br />
You know that a certain signal has a large initial peak <strong>and</strong> then<br />
decays down. You start the ramp converter at the instant the signal<br />
appears (you cannot anticipate), but by the time the counter has<br />
counted a hundred or so pulses, the input voltage has long since<br />
61